——
#DonLucElectronics #DonLuc #DFRobot #AltIMU10 #9DOF #GPS #FireBeetle2ESP32E #EEPROM #RTC #SD #Display #Pololu #ESP32 #IoT #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
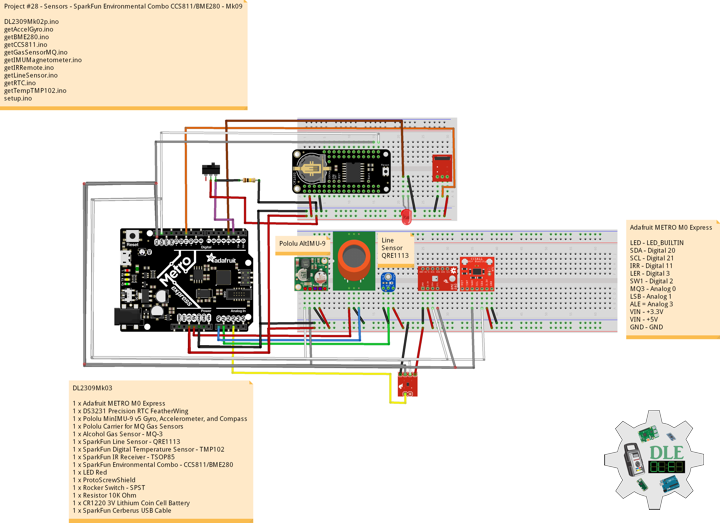
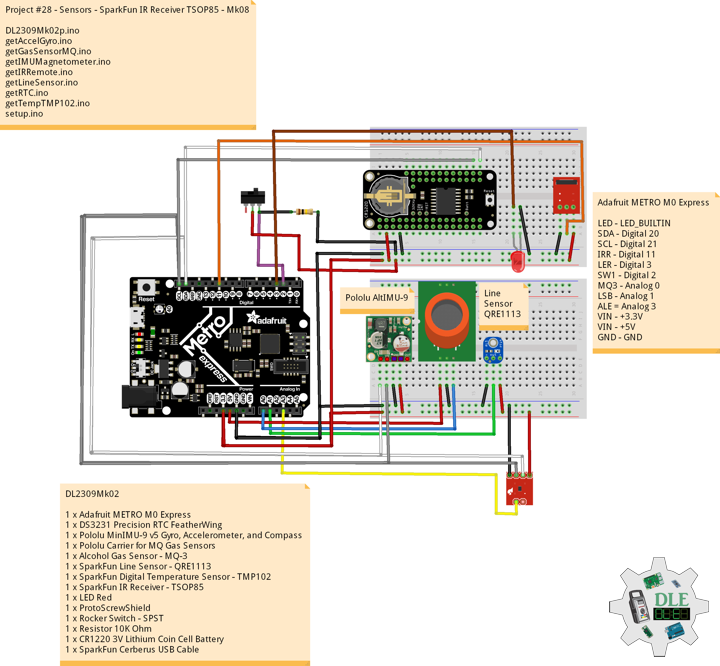
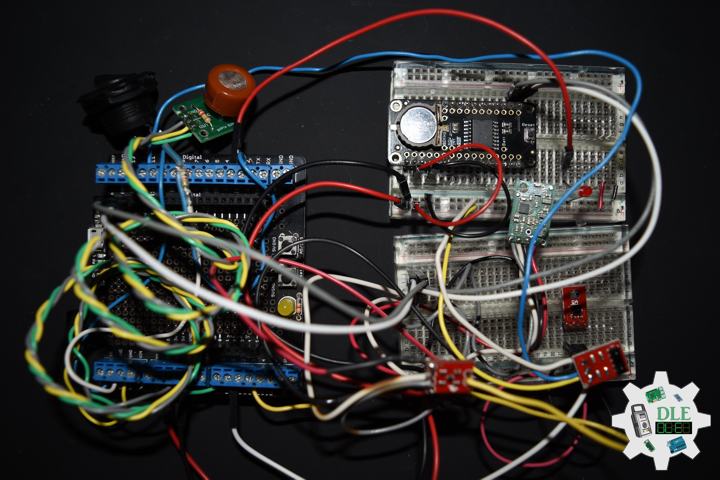
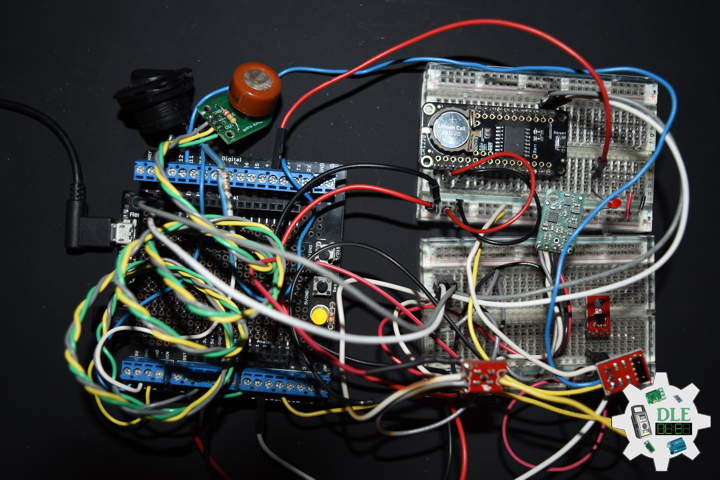
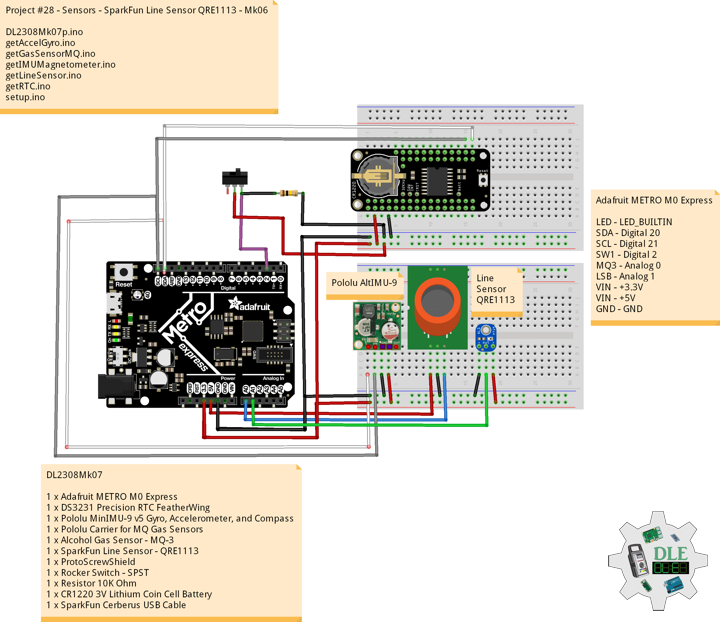
Pololu AltIMU-10 v5 Gyro, Accelerometer, Compass, and Altimeter
The Pololu AltIMU-10 v5 is a compact board that combines ST’s LSM6DS33 3-axis gyroscope and 3-axis accelerometer, LIS3MDL 3-axis magnetometer, and LPS25H digital barometer to form an inertial measurement unit (IMU) and altimeter. These sensors are great ICs, but their small packages make them difficult for the typical student or hobbyist to use. They also operate at voltages below 3.6 Volt, which can make interfacing difficult for microcontrollers operating at 5 Volt. The AltIMU-10 v5 addresses these issues by incorporating additional electronics, including a voltage regulator and a level-shifting circuit, while keeping the overall size as compact as possible. The board ships fully populated with its SMD components, including the LSM6DS33, LIS3MDL, and LPS25H.
Attitude and Heading Reference System (AHRS)
An attitude and heading reference system (AHRS) uses an inertial measurement unit (IMU) consisting of microelectromechanical system (MEMS) inertial sensors to measure the angular rate, acceleration, and Earth’s magnetic field. These measurements can then be used to derive an estimate of the object’s attitude. An AHRS typically includes a 3-axis gyroscope, a 3-axis accelerometer, and a 3-axis magnetometer to determine an estimate of a system’s orientation. Each of these sensors contribute different measurements to the combined system and each exhibit unique limitations.
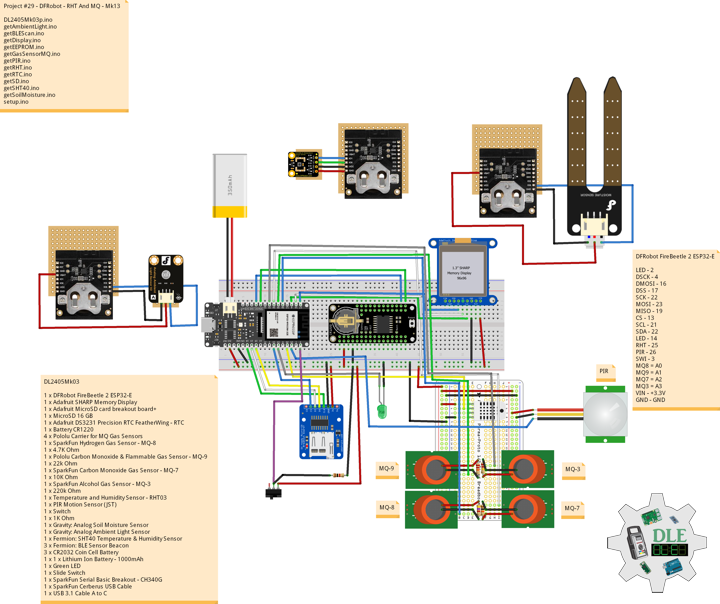
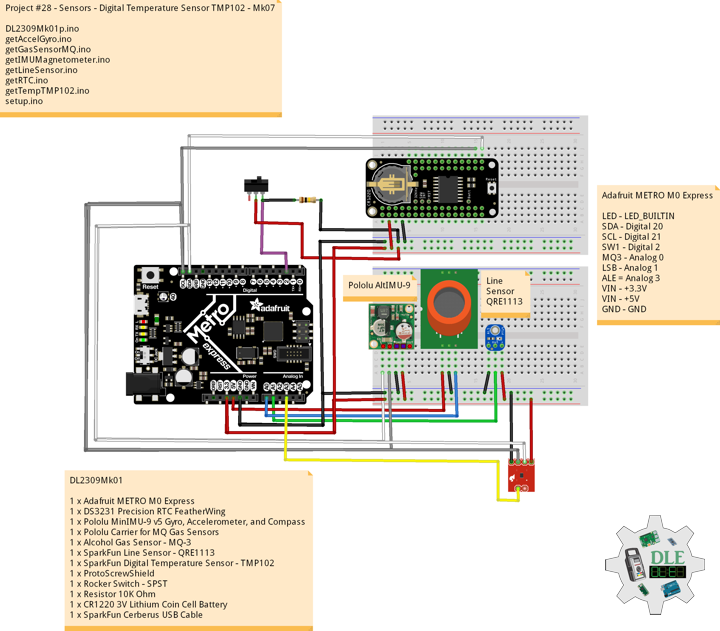
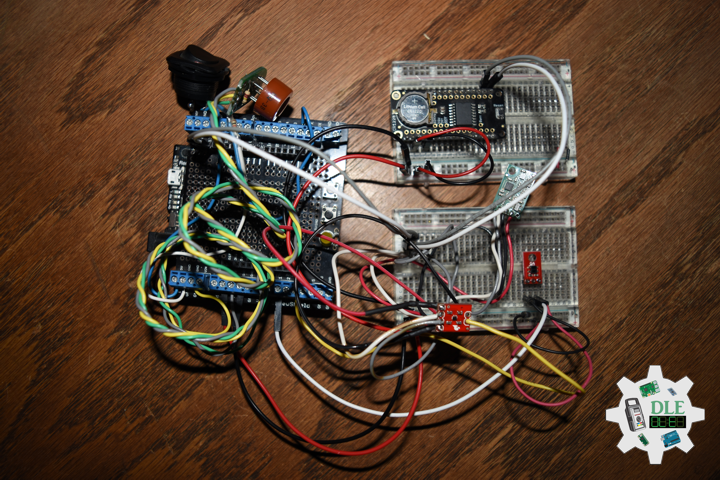
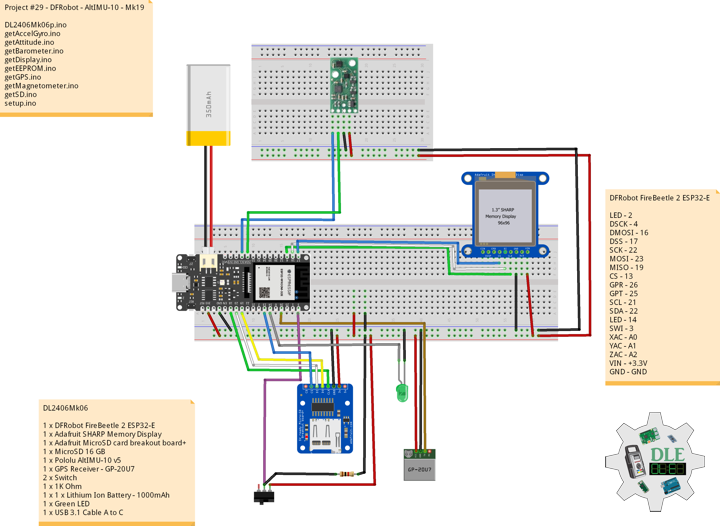
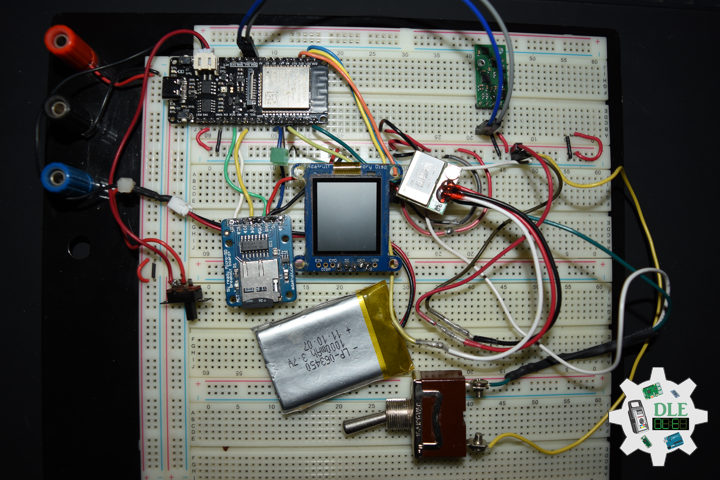
DL2406Mk06
1 x DFRobot FireBeetle 2 ESP32-E
1 x Adafruit SHARP Memory Display
1 x Adafruit MicroSD card breakout board+
1 x MicroSD 16 GB
1 x Pololu AltIMU-10 v5
1 x GPS Receiver – GP-20U7
2 x Switch
1 x 1K Ohm
1 x 1 x Lithium Ion Battery – 1000mAh
1 x Green LED
1 x USB 3.1 Cable A to C
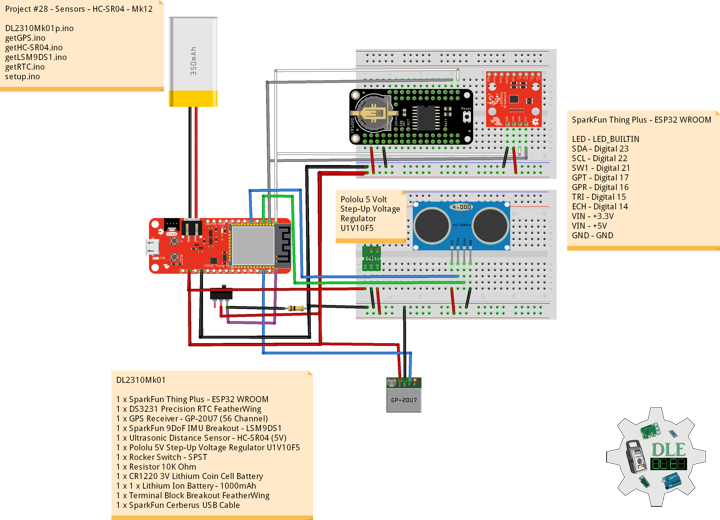
DFRobot FireBeetle 2 ESP32-E
LED – 2
DSCK – 4
DMOSI – 16
DSS – 17
SCK – 22
MOSI – 23
MISO – 19
CS – 13
GPR – 26
GPT – 25
SCL – 21
SDA – 22
LED – 14
SWI – 3
XAC – A0
YAC – A1
ZAC – A2
VIN – +3.3V
GND – GND
——
DL2406Mk06p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #29 - DFRobot - AltIMU-10 - Mk19
29-19
DL2406Mk06p.ino
DL2406Mk06
1 x DFRobot FireBeetle 2 ESP32-E
1 x Adafruit SHARP Memory Display
1 x Adafruit MicroSD card breakout board+
1 x MicroSD 16 GB
1 x Pololu AltIMU-10 v5
1 x GPS Receiver - GP-20U7
2 x Switch
1 x 1K Ohm
1 x 1 x Lithium Ion Battery - 1000mAh
1 x Green LED
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM
// with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// GPS Receiver
#include <TinyGPS++.h>
// ESP32 Hardware Serial
#include <HardwareSerial.h>
// Includes and variables for IMU integration
// STMicroelectronics LSM6DS33 Gyroscope and Accelerometer
#include <LSM6.h>
// STMicroelectronics LIS3MDL Magnetometer
#include <LIS3MDL.h>
// STMicroelectronics LPS25H digital Barometer
#include <LPS.h>
// Earth's magnetic field varies by location. Add or subtract
// a declination to get a more accurate heading. Calculate
// your's here: http://www.ngdc.noaa.gov/geomag-web/#declination
// Declination (degrees) in Mexicali
#define DECLINATION 10.31
// 9DoF IMU
// STMicroelectronics LSM6DS33 Gyroscope and Accelerometer
LSM6 imu;
// Accelerometer and Gyroscopes
// Accelerometer
int imuAX;
int imuAY;
int imuAZ;
//String FullStringB = "";
// Gyroscopes
int imuGX;
int imuGY;
int imuGZ;
// STMicroelectronics LIS3MDL magnetometer
LIS3MDL mag;
// Magnetometer
int magX;
int magY;
int magZ;
// STMicroelectronics LPS25H digital barometer
LPS ps;
// Digital Barometer
float pressure;
float altitude;
float temperature;
// Attitude Calculate Pitch, Roll, and Headind
float r;
float p;
float h;
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// GPS Receiver
#define gpsRXPIN 26
// This one is unused and doesnt have a conection
#define gpsTXPIN 25
// The TinyGPS++ object
TinyGPSPlus gps;
// Latitude
float TargetLat;
// Longitude
float TargetLon;
// GPS Date, Time, Speed, Altitude
// GPS Date
String TargetDat;
// GPS Time
String TargetTim;
// GPS Speeds M/S
String TargetSMS;
// GPS Speeds Km/h
String TargetSKH;
// GPS Altitude Meters
String TargetALT;
// GPS Status
String GPSSt = "";
// MicroSD Card
const int chipSelect = 13;
String zzzzzz = "";
// SHARP Memory Display
#define SHARP_SCK 4
#define SHARP_MOSI 16
#define SHARP_SS 17
// Set the size of the display here, e.g. 144x168!
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices.
#define BLACK 0
#define WHITE 1
// LED Green
int iLEDGreen = 2;
// Define LED
int iLED = 14;
// Switch
int iSwitch = 3;
// Variable for reading the Switch status
int iSwitchState = 0;
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Software Version Information
String sver = "29-19";
void loop() {
// Accelerometer and Gyroscopes
isIMU();
// Magnetometer
isMag();
// Barometer
isBarometer();
// Attitude Calculate Pitch, Roll, and Heading
isAttitude(imuAX, imuAY, imuAZ, -imuGY, -imuGX, imuGZ);
// isGPS
isGPS();
// Read the state of the Switch value
iSwitchState = digitalRead(iSwitch);
// The Switch is HIGH:
if (iSwitchState == HIGH) {
// Attitude Calculate Pitch, Roll, and Heading and Barometer
isDisplayAttitude();
} else {
// Display GPS
isDisplayGPS();
}
// MicroSD Card
isSD();
// iLED HIGH
digitalWrite(iLED, HIGH );
// Delay 5 Second
delay(5000);
}
getAccelGyro.ino
// Accelerometer and Gyroscopes
// Setup IMU
void isSetupIMU() {
// Setup IMU
imu.init();
// Default
imu.enableDefault();
}
// Accelerometer and Gyroscopes
void isIMU() {
// Accelerometer and Gyroscopes
imu.read();
// Accelerometer x, y, z
imuAX = imu.a.x;
imuAY = imu.a.y;
imuAZ = imu.a.z;
// Gyroscopes x, y, z
imuGX = imu.g.x;
imuGY = imu.g.y;
imuGZ = imu.g.z;
}
getAttitude.ino
// Attitude Calculate Pitch, Roll, and Heading
void isAttitude(float ax, float ay, float az, float mx, float my, float mz) {
// Attitude Calculate Pitch, Roll, and Heading
float roll = atan2(ay, az);
float pitch = atan2(-ax, sqrt(ay * ay + az * az));
float heading;
if (my == 0)
heading = (mx < 0) ? PI : 0;
else
heading = atan2(mx, my);
heading -= DECLINATION * PI / 180;
if (heading > PI) heading -= (2 * PI);
else if (heading < -PI) heading += (2 * PI);
// Convert everything from radians to degrees:
heading *= 180.0 / PI;
pitch *= 180.0 / PI;
roll *= 180.0 / PI;
h = heading;
p = pitch;
r = roll;
}
getBarometer.ino
// STMicroelectronics LPS25H digital barometer
// Setup Barometer
void isSetupBarometer(){
// Setup Barometer
ps.init();
// Default
ps.enableDefault();
}
// Barometer
void isBarometer(){
// Barometer
pressure = ps.readPressureMillibars();
// Altitude Meters
altitude = ps.pressureToAltitudeMeters(pressure);
// Temperature Celsius
temperature = ps.readTemperatureC();
}
getDisplay.ino
// SHARP Memory Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
//display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
//display.setTextSize(2);
display.setCursor(0,95);
display.println( sver );
// EEPROM
display.setCursor(0,120);
display.println( "EEPROM" );
display.setCursor(0,140);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
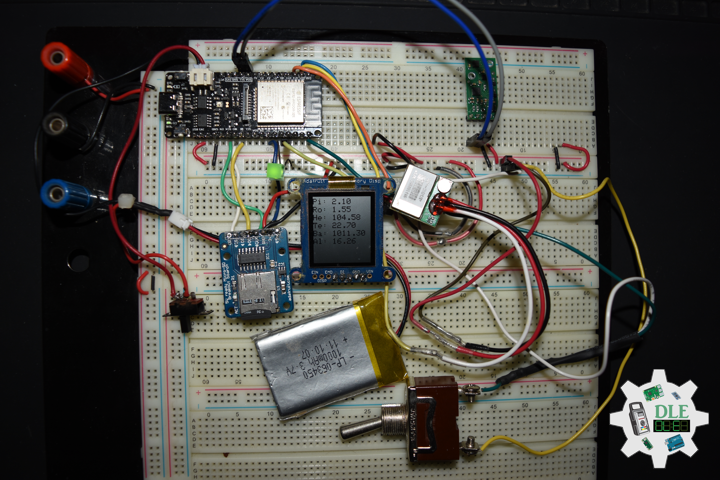
// Attitude Calculate Pitch, Roll, and Heading
void isDisplayAttitude() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Pitch
display.setCursor(0,5);
display.print( "Pi: " );
display.println( p );
// Roll
display.setCursor(0,25);
display.print( "Ro: " );
display.println( r );
// Heading
display.setCursor(0,45);
display.print( "He: " );
display.println( h );
// Temperature Celsius
display.setCursor(0,65);
display.print( "Te: " );
display.println( temperature );
// Barometer
display.setCursor(0,85);
display.print( "Ba: " );
display.println( pressure );
// Altitude Meters
display.setCursor(0,105);
display.print( "Al: " );
display.println( altitude );
// Refresh
display.refresh();
delay( 100 );
}
// Display GPS
void isDisplayGPS() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Latitude
display.setCursor(0,5);
display.print( "Lat: " );
display.println( TargetLat );
// Longitude
display.setCursor(0,30);
display.print( "Lon: " );
display.println( TargetLon );
// GPS Date
display.setCursor(0,55);
display.println( TargetDat );
// GPS Time
display.setCursor(0,80);
display.println( TargetTim );
// GPS Speed M/S
display.setCursor(0,105);
display.print( TargetSMS );
display.println( " M/S" );
// GPS Altitude Meters
display.setCursor(0,130);
display.print( TargetALT );
display.println( " M" );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID() {
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void isSetupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1 , gpsRXPIN , gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
// GPS Date, Time, Speed, Altitude
displayDTS();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
}
else
{
// GPS Status 0
GPSSt = "No";
}
}
// GPS Date, Time, Speed, Altitude
void displayDTS(){
// Date
TargetDat = "";
if (gps.date.isValid())
{
// Date
// Year
TargetDat += String(gps.date.year(), DEC);
TargetDat += "/";
// Month
TargetDat += String(gps.date.month(), DEC);
TargetDat += "/";
// Day
TargetDat += String(gps.date.day(), DEC);
}
// Time
TargetTim = "";
if (gps.time.isValid())
{
// Time
// Hour
TargetTim += String(gps.time.hour(), DEC);
TargetTim += ":";
// Minute
TargetTim += String(gps.time.minute(), DEC);
TargetTim += ":";
// Secound
TargetTim += String(gps.time.second(), DEC);
}
// Speed
TargetSMS = "";
TargetSKH = "";
if (gps.speed.isValid())
{
// Speed
// M/S
int x = gps.speed.mps();
TargetSMS = String( x, DEC);
// Km/h
int y = gps.speed.kmph();
TargetSKH = String( y, DEC);
}
// Altitude
TargetALT = "";
if (gps.altitude.isValid())
{
// Altitude
// Meters
int z = gps.altitude.meters();
TargetALT = String( z, DEC);
}
}
getMagnetometer.ino
// Magnetometer
// Setup Magnetometer
void isSetupMag() {
// Setup Magnetometer
mag.init();
// Default
mag.enableDefault();
}
// Magnetometer
void isMag() {
// Magnetometer
mag.read();
// Magnetometer x, y, z
magX = mag.m.x;
magY = mag.m.y;
magZ = mag.m.z;
}
getSD.ino
// MicroSD Card
// MicroSD Setup
void isSetupSD() {
// MicroSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
// CARD NONE
if(cardType == CARD_NONE){
;
return;
}
// SD Card Type
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
// Size
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// MicroSD Card
void isSD() {
zzzzzz = "";
//DFR|EEPROM Unique ID|Version|
//Accelerometer X|Accelerometer Y|Accelerometer Z|
//Gyroscope X|Gyroscope Y|Gyroscope Z|
//Magnetometer X|Magnetometer Y|Magnetometer Z|
//Pitch|Roll|Heading|
//Temperature C|Pressure Millibars|Altitude Meters|
//GPS|Latitude|Longitude|GPS Date|GPS Time|GPS Speed M/S|GPS Altitude|*\r
zzzzzz = "DFR|" + uid + "|" + sver + "|"
+ String(imuAX) + "|" + String(imuAY) + "|" + String(imuAZ) + "|"
+ String(imuGX) + "|" + String(imuGY) + "|" + String(imuGZ) + "|"
+ String(magX) + "|" + String(magY) + "|" + String(magZ) + "|"
+ String(p) + "|" + String(r) + "|" + String(h) + "|"
+ String(temperature) + "|" + String(pressure) + "|" + String(altitude) + "|"
+ String(GPSSt) + "|" + String(TargetLat) + "|"
+ String(TargetLon) + "|" + String(TargetDat) + "|" + String(TargetTim) + "|"
+ String(TargetSMS) + "|" + String(TargetALT)+ "|*\r";
// msg + 1
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
// Append File
appendFile(SD, "/dfrdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
// List Dir
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
// Write File
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
// Append File
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// Give display
delay(100);
// Set up I2C bus
Wire.begin();
// Give display
delay(100);
//MicroSD Card
isSetupSD();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Delay
delay( 100 );
// GPS Receiver
// Setup GPS
isSetupGPS();
// Delay
delay( 100 );
// Setup IMU
isSetupIMU();
// Setup Magnetometer
isSetupMag();
// Setup Barometer
isSetupBarometer();
// Delay
delay( 100 );
// Initialize digital pin iLED as an output
pinMode(iLED, OUTPUT);
// Outputting high, the LED turns on
digitalWrite(iLED, HIGH);
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// iLEDGreen HIGH
digitalWrite(iLEDGreen, HIGH );
// Initialize the Switch
pinMode(iSwitch, INPUT);
// Don Luc Electronics
// Version
// EEPROM
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc