——
#DonLucElectronics #DonLuc #RTC #SD #Buzzer #FlameSensor #AHT20 #FireBeetle2ESP32E #ESP32 #Display #IoT #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
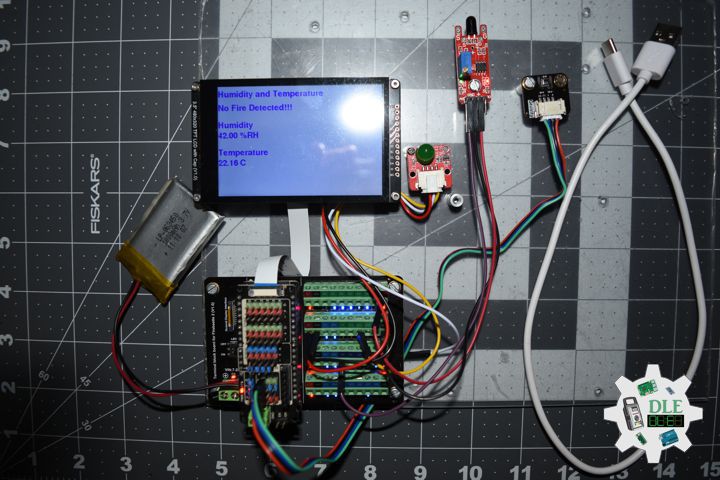
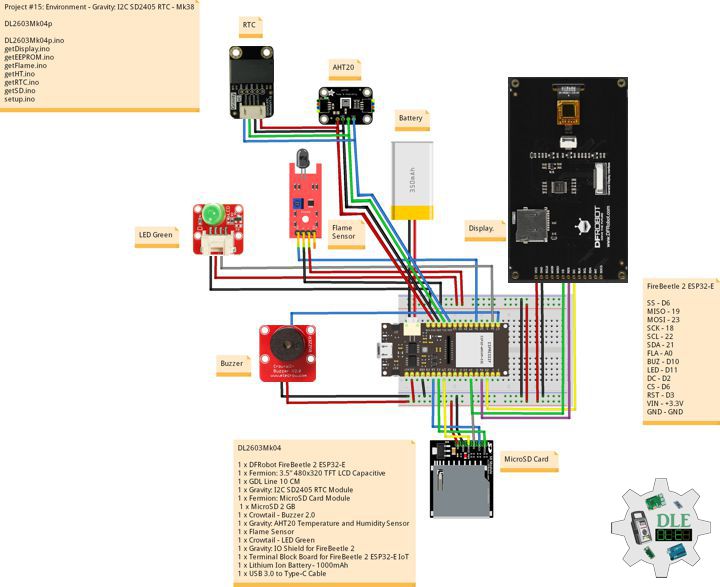
Gravity: I2C SD2405 RTC Module
This is an extremely accurate I2C Real Time Clock (RTC) with crystal compensation, inner chargeable battery. The SD2405AL is available in industrial temperature ranges. The SD2405AL is dual power supply system. When the primary power supply goes down to an assigned value or resumes from low power, the system can switch between the primary power supply and battery automatically. Even there is no external power, it can still work for 5~8 years, 1uA ultra-low power consumption (inner battery).
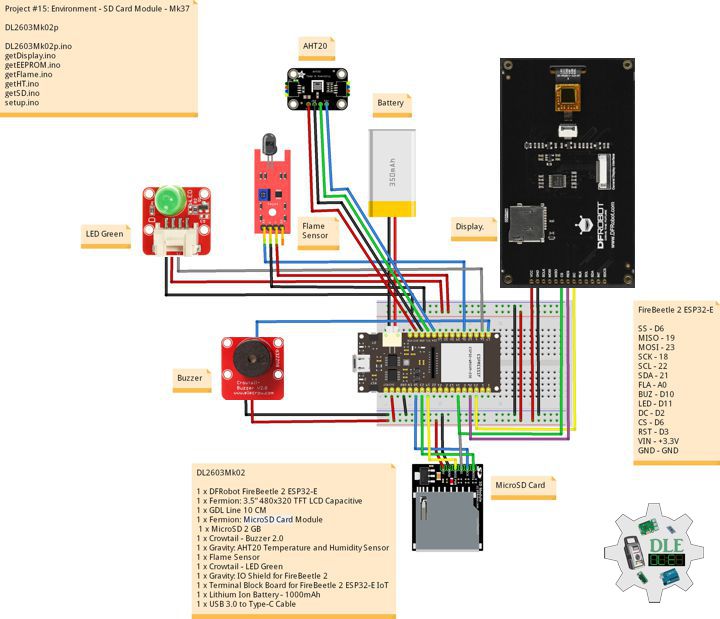
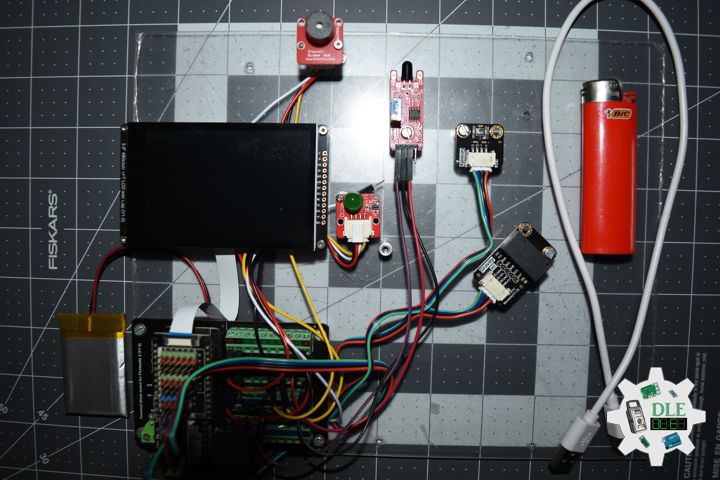
DL2603Mk04
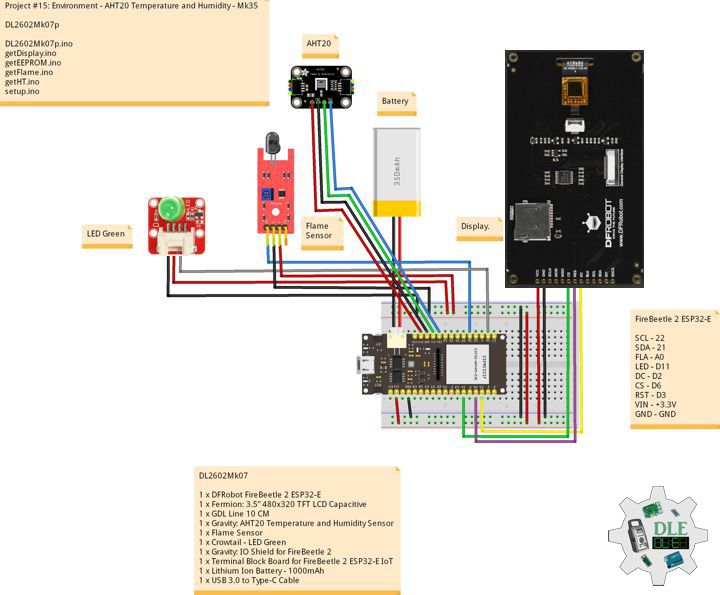
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 3.5” 480×320 TFT LCD Capacitive
1 x GDL Line 10 CM
1 x Gravity: I2C SD2405 RTC Module
1 x Fermion: MicroSD Card Module
1 x MicroSD 2 GB
1 x Crowtail – Buzzer 2.0
1 x Gravity: AHT20 Temperature and Humidity Sensor
1 x Flame Sensor
1 x Crowtail – LED Green
1 x Gravity: IO Shield for FireBeetle 2
1 x Terminal Block Board for FireBeetle 2 ESP32-E IoT
1 x Lithium Ion Battery – 1000mAh
1 x USB 3.0 to Type-C Cable
DL2603Mk04p
DL2603Mk04p.ino
/****** Don Luc Electronics © ******
Software Version Information
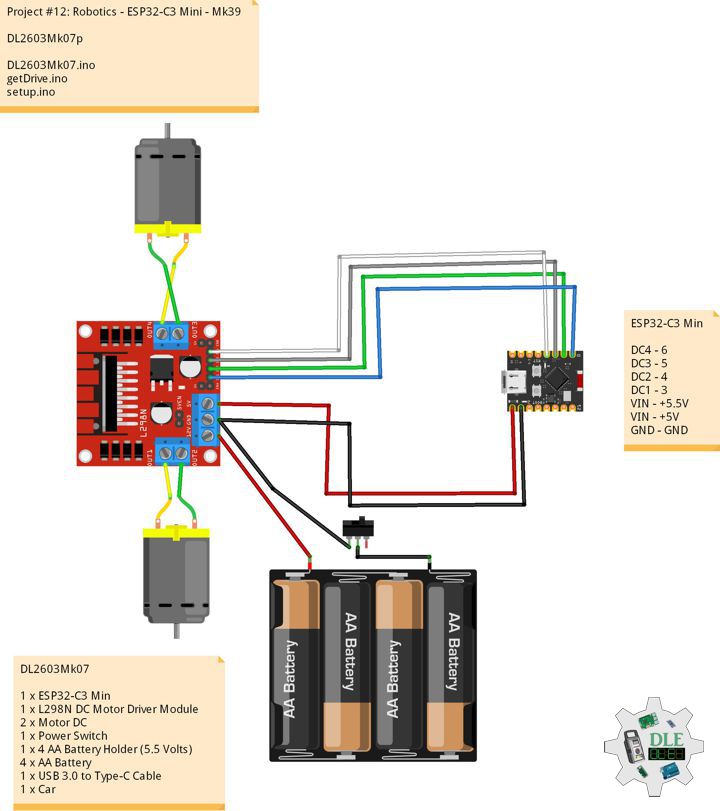
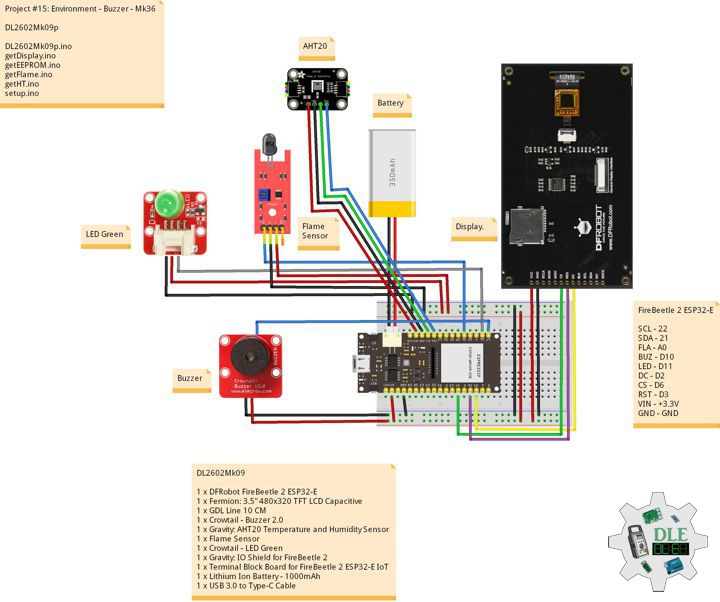
Project #15: Environment - Gravity: I2C SD2405 RTC - Mk38
15-38
DL2603Mk04p.ino
DL2603Mk04
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 3.5” 480x320 TFT LCD Capacitive
1 x GDL Line 10 CM
1 x Gravity: I2C SD2405 RTC Module
1 x Fermion: MicroSD Card Module
1 x MicroSD 2 GB
1 x Crowtail - Buzzer 2.0
1 x Gravity: AHT20 Temperature and Humidity Sensor
1 x Flame Sensor
1 x Crowtail - LED Green
1 x Gravity: IO Shield for FireBeetle 2
1 x Terminal Block Board for FireBeetle 2 ESP32-E IoT
1 x Lithium Ion Battery - 1000mAh
1 x Micro USB Cable
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// DFRobot Display GDL API
#include <DFRobot_GDL.h>
// AHT20 Humidity and Temperature Sensor
#include <DFRobot_AHT20.h>
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// RTC (Real-Time Clock)
#include <GravityRtc.h>
// RTC (Real-Time Clock) Initialization
GravityRtc rtc;
String dateRTC = "";
String timeRTC = "";
// MicroSD Card
const int chipSelect = D6;
String zzzzzz = "";
// Buzzer
int iBuzzer = D10;
// AHT20 Humidity and Temperature Sensor
DFRobot_AHT20 aht20;
// AHT20 Humidity and Temperature Sensor
float h = 0;
float t = 0;
// Flame Sensor
// LED Green
int iLEDG = D11;
// Flame Sensor
int iFlame = A0;
String sF = "";
// Defined ESP32
#define TFT_DC D2
#define TFT_CS D6
#define TFT_RST D3
/*dc=*/ /*cs=*/ /*rst=*/
// DFRobot Display 320x480
DFRobot_ILI9488_320x480_HW_SPI screen(TFT_DC, TFT_CS, TFT_RST);
// Software Version Information
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Software Version Information
String sver = "15-38";
void loop() {
// RTC (Real-Time Clock)
isRTC();
// AHT20 Humidity and Temperature Sensor
isHT();
// Flame Sensor
isFlame();
// isDisplay HT
isDisplayHT();
// Delay 0.1 Second
delay( 100 );
}
getDisplay.ino
// DFRobot Display 320x480
// DFRobot Display 320x480 - UID
void isDisplayUID(){
// DFRobot Display 320x480
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Sans Bold 12pt
screen.setFont(&FreeSansBold12pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Don Luc Electronics
screen.setCursor(0, 30);
screen.println("Don Luc Electronics");
// Tilt Switch
screen.setCursor(0, 60);
screen.println("Gravity: I2C SD2405 RTC");
// Version
screen.setCursor(0, 90);
screen.println("Version");
screen.setCursor(0, 120);
screen.println( sver );
// EEPROM
screen.setCursor(0, 150);
screen.println("EEPROM");
screen.setCursor(0, 180);
screen.println( uid );
}
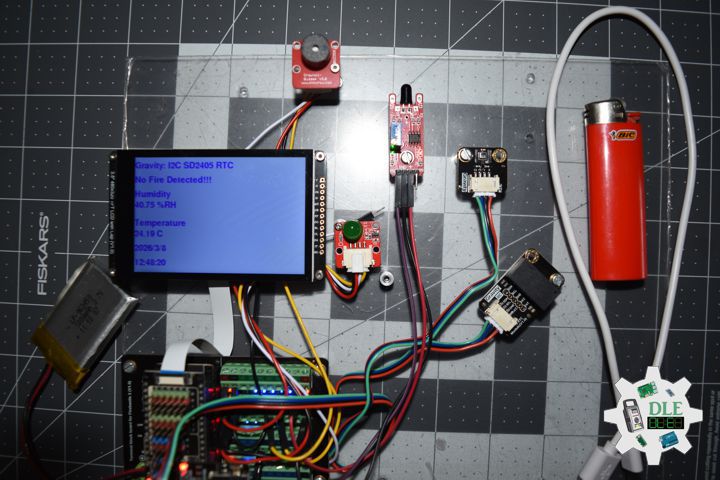
// isDisplay HT
void isDisplayHT(){
// DFRobot Display 320x480
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => white
screen.fillScreen(0xffff);
// Text Color => blue
screen.setTextColor(0x001F);
// Font => Free Sans Bold 12pt
screen.setFont(&FreeSansBold12pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// RTC (Real-Time Clock)
screen.setCursor(0, 30);
screen.println("Gravity: I2C SD2405 RTC");
// Flame Switch
screen.setCursor(0, 70);
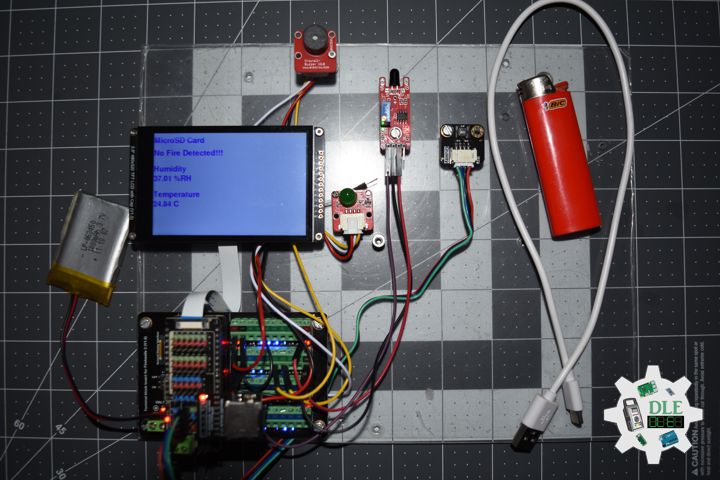
screen.println( sF );
// Humidity
screen.setCursor(0, 110);
screen.println("Humidity");
screen.setCursor(0, 140);
screen.print( h );
screen.setCursor(65, 140);
screen.println( "%RH" );
// Temperature
screen.setCursor(0, 190);
screen.println("Temperature");
screen.setCursor(0, 220);
screen.print( t );
screen.setCursor(65, 220);
screen.println( "C" );
// Date
screen.setCursor(0, 260);
screen.print( dateRTC );
// Time
screen.setCursor(0, 300);
screen.print( timeRTC );
}
getEEPROM.ino
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getFlame.ino
// Flame Sensor
// is Tilt
void isFlame(){
// Flame
// Check if Flame Sensor
if(digitalRead( iFlame) == 0 ){
// Turn LED HIGH
digitalWrite(iLEDG, HIGH);
sF = "Fire Detected!!!";
// iBuzzer On
digitalWrite(iBuzzer, HIGH);
// MicroSD Card
isSD();
}
else {
// Turn LED LOW
digitalWrite(iLEDG, LOW);
sF = "No Fire Detected!!!";
// iBuzzer Off
digitalWrite(iBuzzer, LOW);
}
}
getHT.ino
// AHT20 Humidity and Temperature Sensor
void isHT(){
if(aht20.startMeasurementReady(true)){
// Humidity
h = aht20.getHumidity_RH();
// Temperature
t = aht20.getTemperature_C();
}
}
getRTC.ino
// RTC (Real-Time Clock)
// is RTC (Real-Time Clock)
void isRTC(){
// RTC (Real-Time Clock)
rtc.read();
// Date
dateRTC = rtc.year;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + rtc.month;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + rtc.day;
// Time
timeRTC = rtc.hour;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + rtc.minute;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + rtc.second;
}
getSD.ino
// MicroSD Card
// MicroSD Setup
void isSetupSD() {
// MicroSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
// CARD NONE
if(cardType == CARD_NONE){
;
return;
}
// SD Card Type
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
// Size
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// MicroSD Card
void isSD() {
zzzzzz = "";
//DLE|EEPROM Unique ID|Version|Flame|Date|Time|Humidity|Temperature|*\r
zzzzzz = "DLE|" + uid + "|" + sver + "|" + String( sF ) + "|"
+ String( dateRTC ) + "|" + String( timeRTC ) + "|"
+ String( h ) + "|" + String( t ) + "|*\r";
// msg + 1
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
// Append File
appendFile(SD, "/dledata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
// List Dir
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
// Write File
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
// Append File
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup()
{
// Delay
delay( 100 );
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// Delay
delay(100);
// Wire
Wire.begin();
// Delay
delay( 100 );
// DFRobot Display 320x480
screen.begin();
// Delay
delay( 100 );
// Flame Sensor
// LED Green
pinMode(iLEDG, OUTPUT);
// Flame Sensor
pinMode(iFlame, INPUT);
// Delay
delay( 100 );
// AHT20 Humidity and Temperature Sensor
aht20.begin();
// Delay
delay( 100 );
// iBuzzer
pinMode(iBuzzer, OUTPUT);
// Delay
delay(100);
//MicroSD Card
isSetupSD();
// Delay
delay(100);
// RTC (Real-Time Clock)
rtc.setup();
// Set the RTC time automatically
// Calibrate RTC time by your computer time
rtc.adjustRtc(F(__DATE__), F(__TIME__));
// Delay
delay( 100 );
// DFRobot Display 320x480 - UID
// Don Luc Electronics
// Version
// EEPROM
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Consultant, R&D, Electronics, IoT, Teacher and Instructor
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank , Underwater and UAV Vehicle
- Unmanned Vehicles Terrestrial, Marine and UAV
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2026
https://www.donluc.com/luc/LucPaquinCVEng2026Mk01.pdf
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
DFRobot: https://learn.dfrobot.com/user-10186.html
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Hackster: https://www.hackster.io/luc-paquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc