——
#DonLucElectronics #DonLuc #Camera #ESP32CAM #ESP32 #IoT #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——

——

——
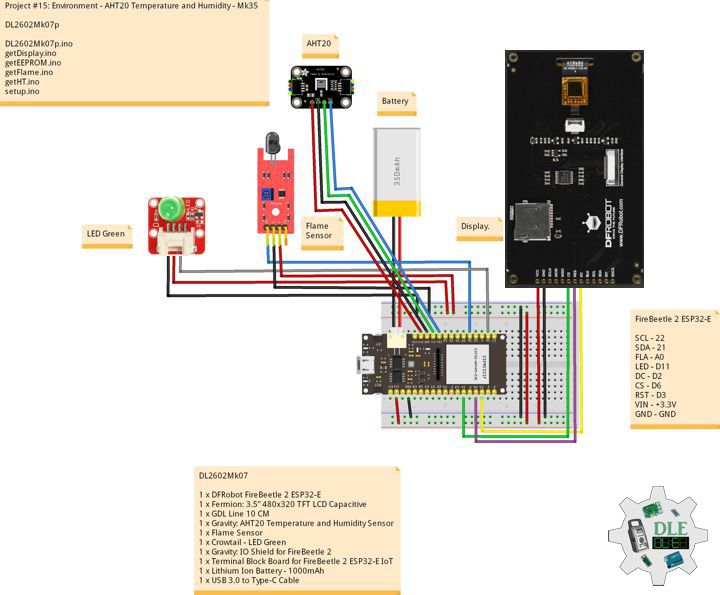
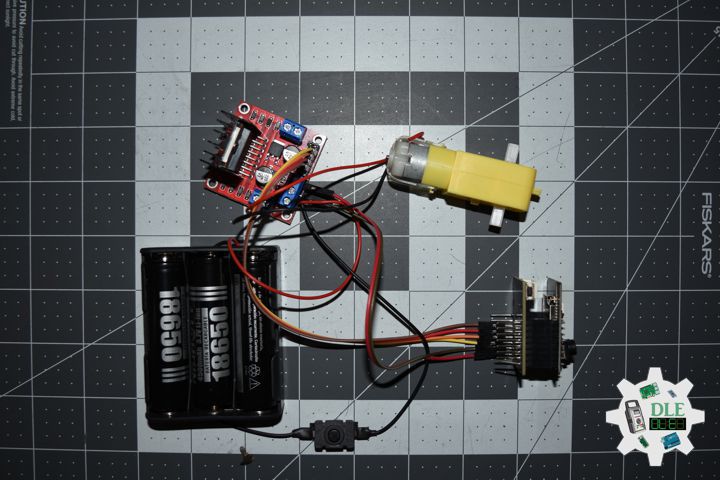
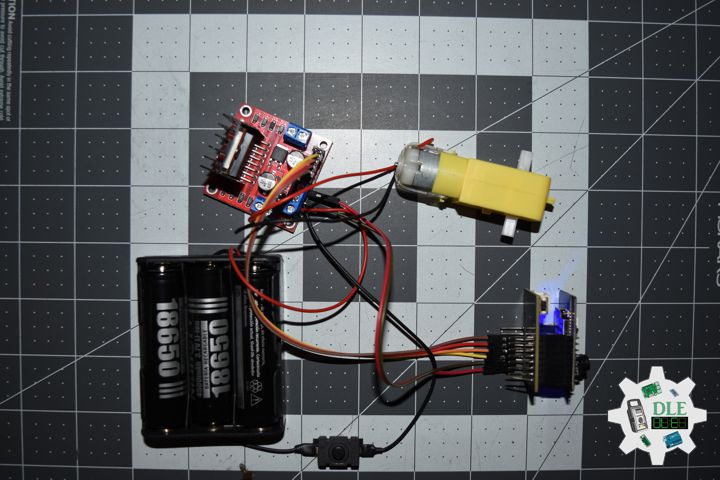
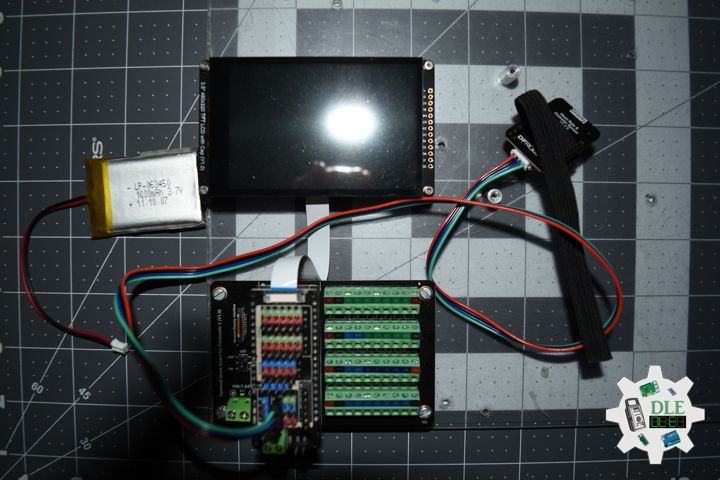
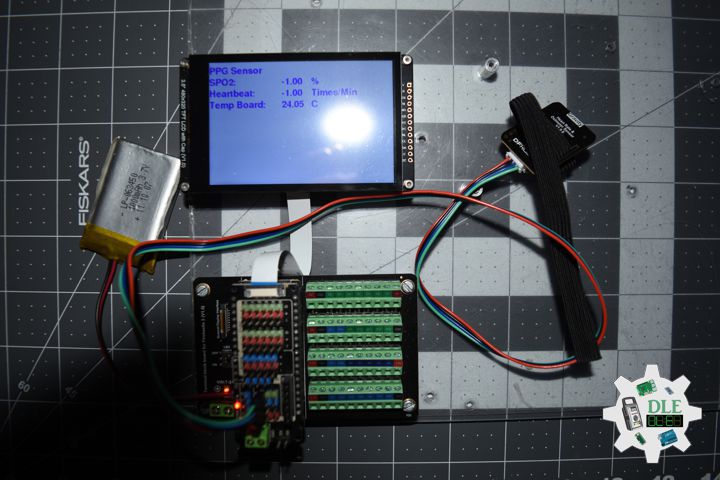
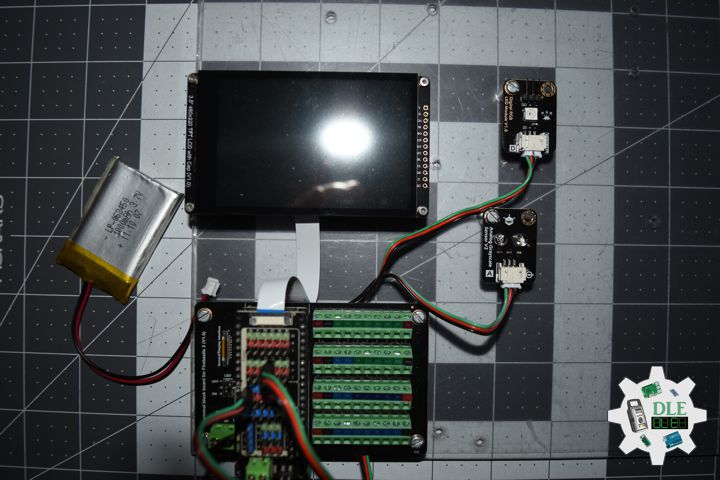
ESP32-CAM Video Streaming Web Server
ESP32-CAM to stream live feed from the OV2640 camera to a Cell Phones browser.
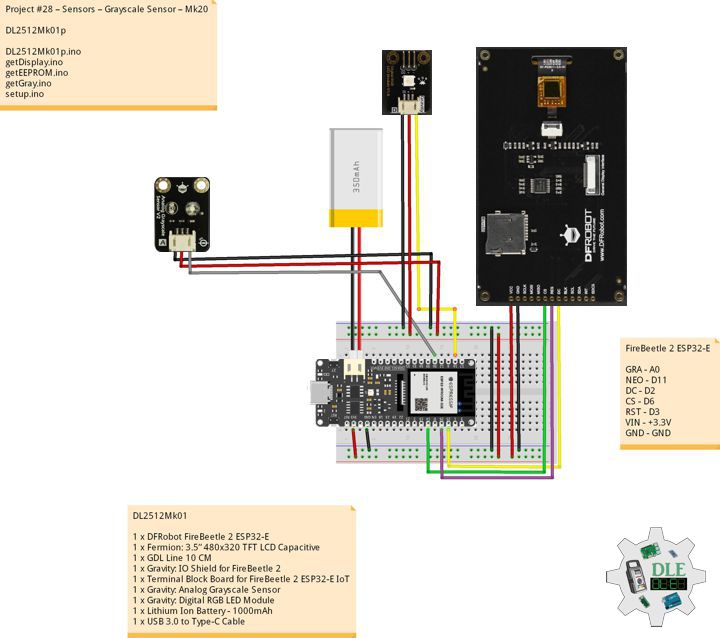
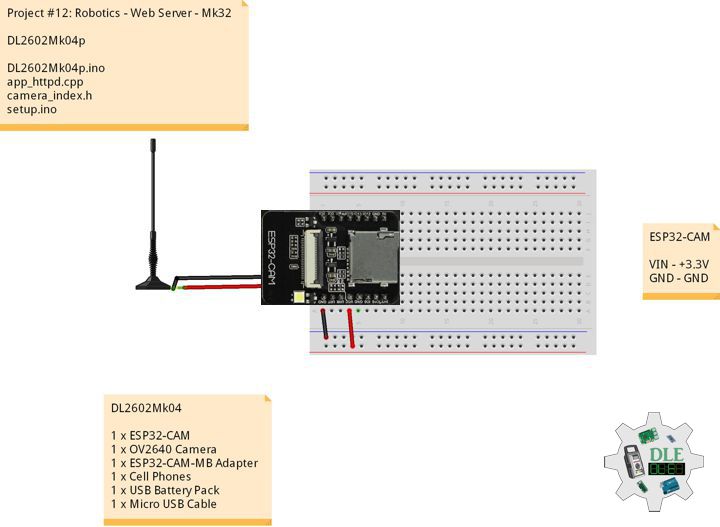
DL2602Mk04
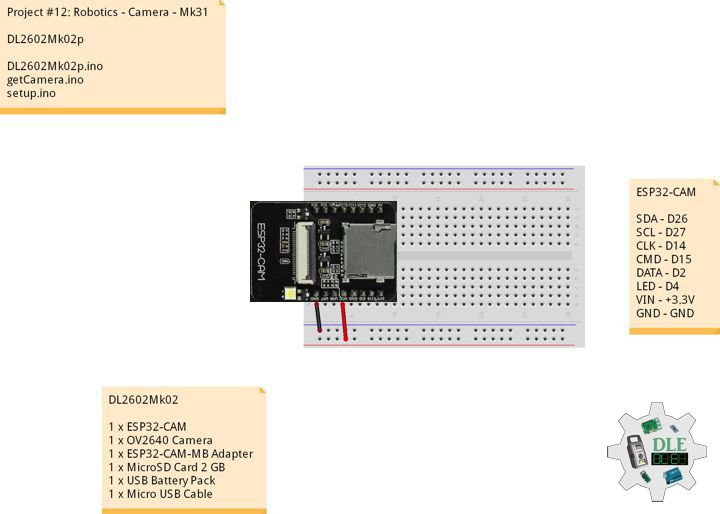
1 x ESP32-CAM
1 x OV2640 Camera
1 x ESP32-CAM-MB Adapter
1 x Cell Phones
1 x USB Battery Pack
1 x Micro USB Cable
DL2602Mk04p
DL2602Mk04p.ino
/****** Don Luc Electronics © ******
Software Version Information
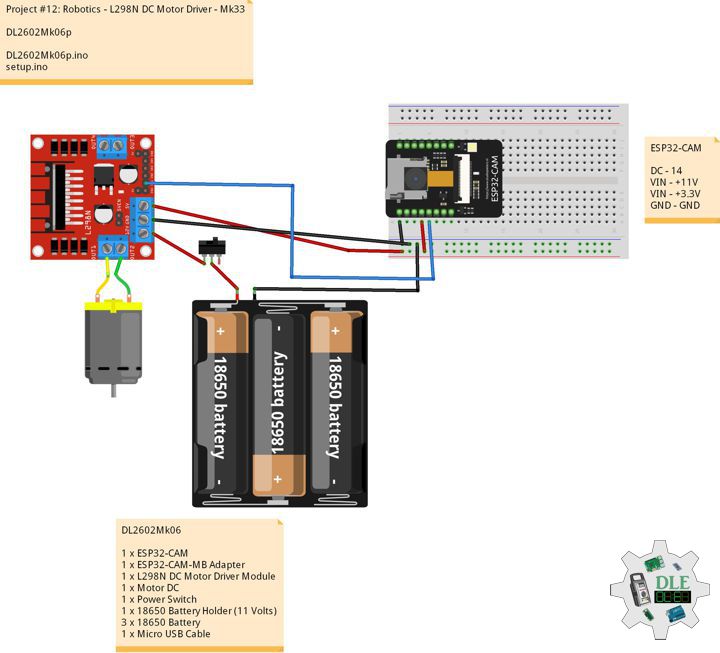
Project #12: Robotics - Web Server - Mk32
12-32
DL2602Mk04p.ino
DL2602Mk04
1 x ESP32-CAM
1 x OV2640 Camera
1 x ESP32-CAM-MB Adapter
1 x Cell Phones
1 x USB Battery Pack
1 x Micro USB Cable
*/
// Include the Library Code
// ESP Camera
#include "esp_camera.h"
// WifI
#include <WiFi.h>
//#define CAMERA_MODEL_AI_THINKER
const char* ssid1 = "Robot_Mk32";
const char* password1 = "";
// Pin definition for CAMERA_MODEL_AI_THINKER
#define PWDN_GPIO_NUM 32
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 0
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27
#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 21
#define Y4_GPIO_NUM 19
#define Y3_GPIO_NUM 18
#define Y2_GPIO_NUM 5
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22
// WiFi Addr
extern String WiFiAddr ="";
// Camera Server
void startCameraServer();
// Software Version Information
String sver = "12-32";
void loop() {
}
app_httpd.cpp
// WiFi Server
#include "esp_http_server.h"
// Timer
#include "esp_timer.h"
// Camera
#include "esp_camera.h"
// Converters
#include "img_converters.h"
// Camera Index
#include "camera_index.h"
// Arduino
#include "Arduino.h"
// LED
#include "driver/ledc.h"
// Disable brownout problems
#include "soc/soc.h"
// Disable brownout problems
#include "soc/rtc_cntl_reg.h"
// Driver
#include "driver/rtc_io.h"
// WiFi
extern String WiFiAddr;
//
typedef struct {
size_t size; //number of values used for filtering
size_t index; //current value index
size_t count; //value count
int sum;
int * values; //array to be filled with values
} ra_filter_t;
typedef struct {
httpd_req_t *req;
size_t len;
} jpg_chunking_t;
#define PART_BOUNDARY "123456789000000000000987654321"
static const char* _STREAM_CONTENT_TYPE = "multipart/x-mixed-replace;boundary=" PART_BOUNDARY;
static const char* _STREAM_BOUNDARY = "\r\n--" PART_BOUNDARY "\r\n";
static const char* _STREAM_PART = "Content-Type: image/jpeg\r\nContent-Length: %u\r\n\r\n";
static ra_filter_t ra_filter;
httpd_handle_t stream_httpd = NULL;
httpd_handle_t camera_httpd = NULL;
static ra_filter_t * ra_filter_init(ra_filter_t * filter, size_t sample_size){
memset(filter, 0, sizeof(ra_filter_t));
filter->values = (int *)malloc(sample_size * sizeof(int));
if(!filter->values){
return NULL;
}
memset(filter->values, 0, sample_size * sizeof(int));
filter->size = sample_size;
return filter;
}
static int ra_filter_run(ra_filter_t * filter, int value){
if(!filter->values){
return value;
}
filter->sum -= filter->values[filter->index];
filter->values[filter->index] = value;
filter->sum += filter->values[filter->index];
filter->index++;
filter->index = filter->index % filter->size;
if (filter->count < filter->size) {
filter->count++;
}
return filter->sum / filter->count;
}
static size_t jpg_encode_stream(void * arg, size_t index, const void* data, size_t len){
jpg_chunking_t *j = (jpg_chunking_t *)arg;
if(!index){
j->len = 0;
}
if(httpd_resp_send_chunk(j->req, (const char *)data, len) != ESP_OK){
return 0;
}
j->len += len;
return len;
}
static esp_err_t capture_handler(httpd_req_t *req){
camera_fb_t * fb = NULL;
esp_err_t res = ESP_OK;
int64_t fr_start = esp_timer_get_time();
fb = esp_camera_fb_get();
if (!fb) {
//Serial.printf("Camera capture failed");
httpd_resp_send_500(req);
return ESP_FAIL;
}
httpd_resp_set_type(req, "image/jpeg");
httpd_resp_set_hdr(req, "Content-Disposition", "inline; filename=capture.jpg");
size_t fb_len = 0;
if(fb->format == PIXFORMAT_JPEG){
fb_len = fb->len;
res = httpd_resp_send(req, (const char *)fb->buf, fb->len);
} else {
jpg_chunking_t jchunk = {req, 0};
res = frame2jpg_cb(fb, 80, jpg_encode_stream, &jchunk)?ESP_OK:ESP_FAIL;
httpd_resp_send_chunk(req, NULL, 0);
fb_len = jchunk.len;
}
esp_camera_fb_return(fb);
int64_t fr_end = esp_timer_get_time();
Serial.printf("JPG: %uB %ums", (uint32_t)(fb_len), (uint32_t)((fr_end - fr_start)/1000));
return res;
}
static esp_err_t stream_handler(httpd_req_t *req){
camera_fb_t * fb = NULL;
esp_err_t res = ESP_OK;
size_t _jpg_buf_len = 0;
uint8_t * _jpg_buf = NULL;
char * part_buf[64];
static int64_t last_frame = 0;
if(!last_frame) {
last_frame = esp_timer_get_time();
}
res = httpd_resp_set_type(req, _STREAM_CONTENT_TYPE);
if(res != ESP_OK){
return res;
}
while(true){
fb = esp_camera_fb_get();
if (!fb) {
Serial.printf("Camera capture failed");
res = ESP_FAIL;
} else {
if(fb->format != PIXFORMAT_JPEG){
bool jpeg_converted = frame2jpg(fb, 80, &_jpg_buf, &_jpg_buf_len);
esp_camera_fb_return(fb);
fb = NULL;
if(!jpeg_converted){
Serial.printf("JPEG compression failed");
res = ESP_FAIL;
}
} else {
_jpg_buf_len = fb->len;
_jpg_buf = fb->buf;
}
}
if(res == ESP_OK){
size_t hlen = snprintf((char *)part_buf, 64, _STREAM_PART, _jpg_buf_len);
res = httpd_resp_send_chunk(req, (const char *)part_buf, hlen);
}
if(res == ESP_OK){
res = httpd_resp_send_chunk(req, (const char *)_jpg_buf, _jpg_buf_len);
}
if(res == ESP_OK){
res = httpd_resp_send_chunk(req, _STREAM_BOUNDARY, strlen(_STREAM_BOUNDARY));
}
if(fb){
esp_camera_fb_return(fb);
fb = NULL;
_jpg_buf = NULL;
} else if(_jpg_buf){
free(_jpg_buf);
_jpg_buf = NULL;
}
if(res != ESP_OK){
break;
}
int64_t fr_end = esp_timer_get_time();
int64_t frame_time = fr_end - last_frame;
last_frame = fr_end;
frame_time /= 1000;
uint32_t avg_frame_time = ra_filter_run(&ra_filter, frame_time);
Serial.printf("MJPG: %uB %ums (%.1ffps), AVG: %ums (%.1ffps)"
,(uint32_t)(_jpg_buf_len),
(uint32_t)frame_time, 1000.0 / (uint32_t)frame_time,
avg_frame_time, 1000.0 / avg_frame_time
);
}
last_frame = 0;
return res;
}
static esp_err_t cmd_handler(httpd_req_t *req){
char* buf;
size_t buf_len;
char variable[32] = {0,};
char value[32] = {0,};
buf_len = httpd_req_get_url_query_len(req) + 1;
if (buf_len > 1) {
buf = (char*)malloc(buf_len);
if(!buf){
httpd_resp_send_500(req);
return ESP_FAIL;
}
if (httpd_req_get_url_query_str(req, buf, buf_len) == ESP_OK) {
if (httpd_query_key_value(buf, "var", variable, sizeof(variable)) == ESP_OK &&
httpd_query_key_value(buf, "val", value, sizeof(value)) == ESP_OK) {
} else {
free(buf);
httpd_resp_send_404(req);
return ESP_FAIL;
}
} else {
free(buf);
httpd_resp_send_404(req);
return ESP_FAIL;
}
free(buf);
} else {
httpd_resp_send_404(req);
return ESP_FAIL;
}
int val = atoi(value);
sensor_t * s = esp_camera_sensor_get();
int res = 0;
if(!strcmp(variable, "framesize")) {
if(s->pixformat == PIXFORMAT_JPEG) res = s->set_framesize(s, (framesize_t)val);
}
else if(!strcmp(variable, "quality")) res = s->set_quality(s, val);
else if(!strcmp(variable, "contrast")) res = s->set_contrast(s, val);
else if(!strcmp(variable, "brightness")) res = s->set_brightness(s, val);
else if(!strcmp(variable, "saturation")) res = s->set_saturation(s, val);
else if(!strcmp(variable, "gainceiling")) res = s->set_gainceiling(s, (gainceiling_t)val);
else if(!strcmp(variable, "colorbar")) res = s->set_colorbar(s, val);
else if(!strcmp(variable, "awb")) res = s->set_whitebal(s, val);
else if(!strcmp(variable, "agc")) res = s->set_gain_ctrl(s, val);
else if(!strcmp(variable, "aec")) res = s->set_exposure_ctrl(s, val);
else if(!strcmp(variable, "hmirror")) res = s->set_hmirror(s, val);
else if(!strcmp(variable, "vflip")) res = s->set_vflip(s, val);
else if(!strcmp(variable, "awb_gain")) res = s->set_awb_gain(s, val);
else if(!strcmp(variable, "agc_gain")) res = s->set_agc_gain(s, val);
else if(!strcmp(variable, "aec_value")) res = s->set_aec_value(s, val);
else if(!strcmp(variable, "aec2")) res = s->set_aec2(s, val);
else if(!strcmp(variable, "dcw")) res = s->set_dcw(s, val);
else if(!strcmp(variable, "bpc")) res = s->set_bpc(s, val);
else if(!strcmp(variable, "wpc")) res = s->set_wpc(s, val);
else if(!strcmp(variable, "raw_gma")) res = s->set_raw_gma(s, val);
else if(!strcmp(variable, "lenc")) res = s->set_lenc(s, val);
else if(!strcmp(variable, "special_effect")) res = s->set_special_effect(s, val);
else if(!strcmp(variable, "wb_mode")) res = s->set_wb_mode(s, val);
else if(!strcmp(variable, "ae_level")) res = s->set_ae_level(s, val);
else {
res = -1;
}
if(res){
return httpd_resp_send_500(req);
}
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
return httpd_resp_send(req, NULL, 0);
}
static esp_err_t status_handler(httpd_req_t *req){
static char json_response[1024];
sensor_t * s = esp_camera_sensor_get();
char * p = json_response;
*p++ = '{';
p+=sprintf(p, "\"framesize\":%u,", s->status.framesize);
p+=sprintf(p, "\"quality\":%u,", s->status.quality);
p+=sprintf(p, "\"brightness\":%d,", s->status.brightness);
p+=sprintf(p, "\"contrast\":%d,", s->status.contrast);
p+=sprintf(p, "\"saturation\":%d,", s->status.saturation);
p+=sprintf(p, "\"special_effect\":%u,", s->status.special_effect);
p+=sprintf(p, "\"wb_mode\":%u,", s->status.wb_mode);
p+=sprintf(p, "\"awb\":%u,", s->status.awb);
p+=sprintf(p, "\"awb_gain\":%u,", s->status.awb_gain);
p+=sprintf(p, "\"aec\":%u,", s->status.aec);
p+=sprintf(p, "\"aec2\":%u,", s->status.aec2);
p+=sprintf(p, "\"ae_level\":%d,", s->status.ae_level);
p+=sprintf(p, "\"aec_value\":%u,", s->status.aec_value);
p+=sprintf(p, "\"agc\":%u,", s->status.agc);
p+=sprintf(p, "\"agc_gain\":%u,", s->status.agc_gain);
p+=sprintf(p, "\"gainceiling\":%u,", s->status.gainceiling);
p+=sprintf(p, "\"bpc\":%u,", s->status.bpc);
p+=sprintf(p, "\"wpc\":%u,", s->status.wpc);
p+=sprintf(p, "\"raw_gma\":%u,", s->status.raw_gma);
p+=sprintf(p, "\"lenc\":%u,", s->status.lenc);
p+=sprintf(p, "\"hmirror\":%u,", s->status.hmirror);
p+=sprintf(p, "\"dcw\":%u,", s->status.dcw);
p+=sprintf(p, "\"colorbar\":%u", s->status.colorbar);
*p++ = '}';
*p++ = 0;
httpd_resp_set_type(req, "application/json");
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
return httpd_resp_send(req, json_response, strlen(json_response));
}
static esp_err_t index_handler(httpd_req_t *req){
httpd_resp_set_type(req, "text/html");
String page = "";
page += "<meta name=\"viewport\" content=\"width=device-width, initial-scale=1.0, maximum-scale=1.0, user-scalable=0\">\n";
page +="<style>.test{-moz-user-select: none;-o-user-select:none;-khtml-user-select:none;-webkit-user-select:none;-ms-user-select:none;user-select:none;}</style>";
page += "<script>var xhttp = new XMLHttpRequest();</script>";
page += "<script>function getsend(arg) { xhttp.open('GET', arg +'?' + new Date().getTime(), true); xhttp.send() } </script>";
//page += "<p align=center><IMG SRC='http://" + WiFiAddr + ":81/stream' style='width:280px;'></p><br/><br/>";
page += "<p align=center><IMG SRC='http://" + WiFiAddr + ":81/stream' style='width:300px; transform:rotate(0deg);'></p><br/><br/>";
page +="<div unselectable=\"on\" onselectstart=\"return false\">";
//page += "<p align=center> <button style=background-color:Green;width:90px;height:80px onmousedown=getsend('go') onmouseup=getsend('stop') ontouchstart=getsend('go') ontouchend=getsend('stop') ><b>Forward</b></button> </p>";
page += "<p align=center>";
//page += "<button style=background-color:Green;width:90px;height:80px; onmousedown=getsend('left') onmouseup=getsend('stop') ontouchstart=getsend('left') ontouchend=getsend('stop')><b>Left</b></button> ";
//page += "<button style=background-color:Red;width:90px;height:80px onmousedown=getsend('stop') onmouseup=getsend('stop')><b>Stop</b></button> ";
//page += "<button style=background-color:Green;width:90px;height:80px onmousedown=getsend('right') onmouseup=getsend('stop') ontouchstart=getsend('right') ontouchend=getsend('stop')><b>Right</b></button>";
page += "</p>";
//page += "<p align=center><button style=background-color:Green;width:90px;height:80px onmousedown=getsend('back') onmouseup=getsend('stop') ontouchstart=getsend('back') ontouchend=getsend('stop') ><b>Backward</b></button></p>";
page += "<p align=center>";
//page += "<button style=background-color:yellow;width:140px;height:40px onmousedown=getsend('ledon')><b>Light ON</b></button>";
//page += "<button style=background-color:yellow;width:140px;height:40px onmousedown=getsend('ledoff')><b>Light OFF</b></button>";
page += "</p>";
page +="</div>";
return httpd_resp_send(req, &page[0], strlen(&page[0]));
}
void startCameraServer(){
httpd_config_t config = HTTPD_DEFAULT_CONFIG();
httpd_uri_t index_uri = {
.uri = "/",
.method = HTTP_GET,
.handler = index_handler,
.user_ctx = NULL
};
httpd_uri_t status_uri = {
.uri = "/status",
.method = HTTP_GET,
.handler = status_handler,
.user_ctx = NULL
};
httpd_uri_t cmd_uri = {
.uri = "/control",
.method = HTTP_GET,
.handler = cmd_handler,
.user_ctx = NULL
};
httpd_uri_t capture_uri = {
.uri = "/capture",
.method = HTTP_GET,
.handler = capture_handler,
.user_ctx = NULL
};
httpd_uri_t stream_uri = {
.uri = "/stream",
.method = HTTP_GET,
.handler = stream_handler,
.user_ctx = NULL
};
ra_filter_init(&ra_filter, 20);
Serial.printf("Starting web server on port: '%d'", config.server_port);
if (httpd_start(&camera_httpd, &config) == ESP_OK) {
httpd_register_uri_handler(camera_httpd, &index_uri);
}
config.server_port += 1;
config.ctrl_port += 1;
Serial.printf("Starting stream server on port: '%d'", config.server_port);
if (httpd_start(&stream_httpd, &config) == ESP_OK) {
httpd_register_uri_handler(stream_httpd, &stream_uri);
}
}
camera_index.h
// Camera
#define index_html_gz_len 3635
const uint8_t index_html_gz[] = {
0x1F, 0x8B, 0x08, 0x08, 0x8A, 0xF8, 0xFE, 0x5B, 0x00, 0x03, 0x69, 0x6E, 0x64, 0x65, 0x78, 0x2E,
0x68, 0x74, 0x6D, 0x6C, 0x00, 0xDD, 0x5C, 0xFD, 0x72, 0xDA, 0xB8, 0x16, 0xFF, 0x7F, 0x9F, 0xC2,
0x71, 0x77, 0x8B, 0x3D, 0x6B, 0x08, 0x10, 0x92, 0xA6, 0x26, 0x90, 0x0D, 0x84, 0xB6, 0x3B, 0xD3,
0xAF, 0x6D, 0xF6, 0xEE, 0xEE, 0xCC, 0xCE, 0x4E, 0x2B, 0x6C, 0x19, 0xD4, 0x18, 0x8B, 0xDA, 0x72,
0x80, 0xB2, 0x7E, 0x8E, 0xFB, 0x40, 0xF7, 0xC5, 0xEE, 0x91, 0x64, 0x1B, 0x9B, 0x8F, 0x10, 0xA0,
0x85, 0x4E, 0x9B, 0x19, 0x90, 0xE5, 0xA3, 0xA3, 0x73, 0xCE, 0xEF, 0x7C, 0x48, 0xC6, 0xEA, 0xC5,
0x91, 0x4D, 0x2D, 0x36, 0x19, 0x62, 0xA5, 0xCF, 0x06, 0x6E, 0xF3, 0x87, 0x0B, 0xF9, 0xA5, 0xC0,
0xBF, 0x8B, 0x3E, 0x46, 0xB6, 0x6C, 0x8A, 0xCB, 0x01, 0x66, 0x48, 0xB1, 0xFA, 0xC8, 0x0F, 0x30,
0x6B, 0xA8, 0x21, 0x73, 0x8A, 0xE7, 0xEA, 0xFC, 0x6D, 0x0F, 0x0D, 0x70, 0x43, 0xBD, 0x23, 0x78,
0x34, 0xA4, 0x3E, 0x53, 0x15, 0x8B, 0x7A, 0x0C, 0x7B, 0x40, 0x3E, 0x22, 0x36, 0xEB, 0x37, 0x6C,
0x7C, 0x47, 0x2C, 0x5C, 0x14, 0x17, 0x06, 0xF1, 0x08, 0x23, 0xC8, 0x2D, 0x06, 0x16, 0x72, 0x71,
0xA3, 0x92, 0xE5, 0xC5, 0x08, 0x73, 0x71, 0xB3, 0x73, 0xF3, 0xF6, 0xA4, 0xAA, 0xBC, 0xF9, 0xA3,
0x5A, 0x3B, 0x2B, 0x5F, 0x1C, 0xCB, 0xBE, 0x19, 0x4D, 0xC0, 0x26, 0xFC, 0xBA, 0x4B, 0xED, 0xC9,
0xD4, 0x81, 0x69, 0x8A, 0x0E, 0x1A, 0x10, 0x77, 0x62, 0x5E, 0xF9, 0xC0, 0xD4, 0x78, 0x81, 0xDD,
0x3B, 0xCC, 0x88, 0x85, 0x8C, 0x00, 0x79, 0x41, 0x31, 0xC0, 0x3E, 0x71, 0xEA, 0x5D, 0x64, 0xDD,
0xF6, 0x7C, 0x1A, 0x7A, 0xB6, 0xF9, 0xA8, 0x72, 0xCE, 0xFF, 0xEA, 0x16, 0x75, 0xA9, 0x6F, 0x3E,
0xEA, 0x3C, 0xE3, 0x7F, 0x75, 0xC1, 0x27, 0x20, 0x9F, 0xB1, 0x59, 0x39, 0x1B, 0x8E, 0xA3, 0x7E,
0x75, 0x9A, 0xE9, 0x39, 0x87, 0x9E, 0x00, 0x5B, 0x8C, 0x50, 0xAF, 0x34, 0x40, 0xC4, 0x9B, 0xDA,
0x24, 0x18, 0xBA, 0x68, 0x62, 0x3A, 0x2E, 0x1E, 0x47, 0x8F, 0x06, 0xD8, 0x0B, 0x8D, 0xDC, 0x7D,
0xDE, 0x5F, 0xB4, 0x89, 0x2F, 0xFB, 0x4C, 0x98, 0x2A, 0x1C, 0x78, 0x92, 0x30, 0x1D, 0xEB, 0x51,
0x0F, 0xD7, 0x05, 0xE1, 0xC8, 0x47, 0x43, 0xB8, 0xE4, 0x5F, 0xF5, 0x01, 0xF1, 0xA4, 0x91, 0xCC,
0x93, 0x5A, 0x79, 0x38, 0xCE, 0x09, 0x7E, 0x72, 0xC6, 0xFF, 0xEA, 0x43, 0x64, 0xDB, 0xC4, 0xEB,
0x99, 0xE7, 0xFC, 0x36, 0xF5, 0x6D, 0xEC, 0x17, 0x7D, 0x64, 0x93, 0x30, 0x30, 0x6B, 0xD0, 0x33,
0x40, 0x7E, 0x0F, 0x78, 0x30, 0x3A, 0x34, 0x8B, 0x95, 0xF2, 0xAC, 0xC3, 0x27, 0xBD, 0x3E, 0x33,
0x79, 0x4F, 0xF4, 0x28, 0xC6, 0x26, 0xA7, 0x46, 0x46, 0x14, 0x21, 0x08, 0x72, 0x49, 0xCF, 0x2B,
0x12, 0x86, 0x07, 0x81, 0x19, 0x30, 0x1F, 0x33, 0xAB, 0x1F, 0x39, 0xA4, 0x17, 0xFA, 0x78, 0x9A,
0x08, 0x50, 0x8E, 0x79, 0x43, 0xA3, 0x38, 0xC2, 0xDD, 0x5B, 0xC2, 0x8A, 0xF1, 0x64, 0x5D, 0xEC,
0x50, 0x1F, 0xA7, 0x04, 0xC5, 0xAE, 0x4B, 0xAD, 0xDB, 0x62, 0xC0, 0x90, 0xCF, 0x16, 0x89, 0x91,
0xC3, 0xB0, 0x3F, 0x4F, 0x8B, 0x41, 0xE1, 0x05, 0xCA, 0x84, 0x41, 0x7C, 0x49, 0x3C, 0x97, 0x78,
0x78, 0x15, 0x5B, 0xC9, 0x21, 0x4F, 0x2A, 0xFA, 0x62, 0x35, 0x14, 0x32, 0xE8, 0xA5, 0x16, 0x10,
0x93, 0xD6, 0xA5, 0xE1, 0x2B, 0xE5, 0xF2, 0x4F, 0xF5, 0x3E, 0x16, 0xF6, 0x42, 0x21, 0xA3, 0xF7,
0x1B, 0x99, 0xFB, 0xC6, 0x2F, 0x03, 0x6C, 0x13, 0xA4, 0x68, 0x33, 0xF0, 0x94, 0xF3, 0x32, 0x58,
0x5A, 0x57, 0x90, 0x67, 0x2B, 0x1A, 0xF5, 0x09, 0x58, 0x1B, 0x09, 0x57, 0x70, 0xA1, 0x07, 0xDC,
0x7E, 0x88, 0xF5, 0xE9, 0x3A, 0x18, 0x62, 0x8F, 0x58, 0x0D, 0xC4, 0x12, 0x0D, 0x06, 0x68, 0x5C,
0xCC, 0x68, 0xC1, 0x2F, 0x63, 0x4D, 0x20, 0xD4, 0x2C, 0x0D, 0x3A, 0xEF, 0xFA, 0x4A, 0x51, 0xE1,
0xAE, 0xA5, 0xC7, 0xEA, 0x0A, 0x15, 0x33, 0xEA, 0x7E, 0x2F, 0x28, 0x27, 0x11, 0xFB, 0xA8, 0x1B,
0x32, 0x46, 0xBD, 0x60, 0x8D, 0x99, 0x3F, 0x86, 0x01, 0x23, 0xCE, 0xA4, 0x18, 0x83, 0x62, 0x06,
0x43, 0x04, 0xF9, 0xAA, 0x8B, 0xD9, 0x08, 0x63, 0x08, 0x5D, 0x0F, 0xDD, 0x01, 0xDC, 0xBD, 0x9E,
0x8B, 0xA7, 0x56, 0xE8, 0x07, 0x90, 0x39, 0x86, 0x94, 0x00, 0xA5, 0x5F, 0xCF, 0x01, 0x90, 0x25,
0x2C, 0x5A, 0xDD, 0x29, 0x0D, 0x19, 0x17, 0x09, 0x44, 0xA4, 0xC0, 0x8F, 0xB0, 0x09, 0xB4, 0xA4,
0xD9, 0xCB, 0x89, 0xCD, 0xCB, 0x73, 0x63, 0x4C, 0xAB, 0x8F, 0xAD, 0x5B, 0x6C, 0xFF, 0x9C, 0x4F,
0x17, 0x22, 0xD5, 0x94, 0x88, 0x37, 0x0C, 0x59, 0x91, 0x27, 0x84, 0xE1, 0x1A, 0x7D, 0x84, 0x25,
0xE2, 0x29, 0xAA, 0xD5, 0xD4, 0x67, 0xCD, 0xD3, 0xE1, 0x58, 0x29, 0xE7, 0x18, 0x35, 0x5D, 0xD4,
0xC5, 0x6E, 0xCA, 0x2E, 0x36, 0xA2, 0xF4, 0xA7, 0xD8, 0x09, 0x32, 0xD9, 0x23, 0x93, 0xA1, 0x6A,
0x4F, 0x7E, 0xCA, 0x31, 0x52, 0x44, 0xDB, 0xC8, 0x75, 0x05, 0xD8, 0x05, 0x18, 0x64, 0x42, 0x84,
0x9E, 0x91, 0x59, 0x89, 0x4A, 0x3E, 0xF2, 0x7A, 0x18, 0x00, 0x1C, 0x1B, 0x49, 0x33, 0x93, 0x52,
0x97, 0x4D, 0x6F, 0x96, 0x15, 0x10, 0x3B, 0x92, 0x40, 0x2E, 0x78, 0x7C, 0xA2, 0x56, 0x86, 0xBA,
0x52, 0x4D, 0x73, 0x23, 0x18, 0x3A, 0x67, 0x0A, 0x9E, 0x35, 0xE7, 0x10, 0x8C, 0x2B, 0x81, 0xE3,
0xE4, 0xEB, 0x84, 0xE3, 0x9C, 0x94, 0x4F, 0x6A, 0x73, 0xD1, 0xCF, 0xE7, 0xC9, 0xD7, 0x8A, 0x7A,
0x8A, 0x71, 0x2C, 0xA0, 0xD9, 0xA7, 0x77, 0xD8, 0x9F, 0xE6, 0x59, 0xD5, 0x9E, 0xD6, 0xEC, 0xE4,
0x3E, 0x02, 0xBF, 0xBC, 0xC3, 0x79, 0x82, 0x6A, 0xC5, 0xAA, 0x56, 0x62, 0x82, 0x12, 0x68, 0x88,
0xBA, 0x2E, 0xB6, 0x13, 0x57, 0xB3, 0xB1, 0x83, 0x42, 0x97, 0xE5, 0xA4, 0x43, 0x65, 0xFE, 0x17,
0x09, 0x5B, 0xFF, 0xCD, 0xCB, 0x78, 0x43, 0xD8, 0xF2, 0x9F, 0x69, 0x12, 0x20, 0x68, 0x38, 0xC4,
0x08, 0xFA, 0x2C, 0x2C, 0x4B, 0xCD, 0x62, 0x72, 0x13, 0x6E, 0xB1, 0xA4, 0xC0, 0xCC, 0x99, 0x27,
0x09, 0xFF, 0xC5, 0xB9, 0x4C, 0x87, 0x5A, 0x61, 0x30, 0x73, 0xF2, 0x25, 0x14, 0x66, 0x22, 0x4E,
0xE0, 0x12, 0x61, 0xC6, 0xD0, 0xF3, 0xB8, 0x6E, 0x45, 0xE6, 0xC3, 0xC4, 0xD3, 0x25, 0x42, 0x2D,
0xE2, 0x93, 0x15, 0x31, 0x2E, 0xD7, 0x79, 0x50, 0xCA, 0x29, 0xD6, 0x4A, 0x40, 0x61, 0x1E, 0x25,
0x26, 0x7B, 0x80, 0x3C, 0xAC, 0x1F, 0x0E, 0xBA, 0xD3, 0x78, 0x78, 0x05, 0x62, 0x43, 0x32, 0xF0,
0x7B, 0x5D, 0xA4, 0x95, 0x8D, 0xB2, 0x71, 0x02, 0x1F, 0x7A, 0xCE, 0x60, 0x52, 0xE4, 0x6A, 0x75,
0xA1, 0xFA, 0x9E, 0xCE, 0xD7, 0xEB, 0xD8, 0x81, 0xE6, 0xB4, 0x59, 0x85, 0x4F, 0xAE, 0x70, 0x57,
0x4A, 0xDC, 0xE1, 0x57, 0x18, 0x7C, 0x9D, 0x51, 0x17, 0xED, 0xB5, 0xD4, 0x10, 0x03, 0xFA, 0xB9,
0x28, 0xE3, 0xEF, 0x60, 0x58, 0x64, 0x44, 0xD8, 0x37, 0x0E, 0xCB, 0xE5, 0x09, 0xB6, 0xB4, 0x45,
0x59, 0x49, 0xF4, 0x2E, 0xCA, 0x6C, 0x02, 0x6C, 0x3C, 0x28, 0x21, 0x3E, 0x94, 0x92, 0xFA, 0x42,
0xCF, 0xAA, 0xB9, 0x1D, 0xE2, 0xBA, 0x45, 0x97, 0x8E, 0xE6, 0xB2, 0x47, 0xCE, 0xCE, 0xF3, 0x76,
0x9D, 0x37, 0xFF, 0xBD, 0xBC, 0x43, 0xF0, 0xB9, 0xAF, 0xC0, 0x7B, 0xFF, 0x41, 0x34, 0x03, 0xE5,
0x9E, 0x20, 0x59, 0x67, 0xD1, 0x07, 0x0C, 0x5D, 0x34, 0x98, 0xCC, 0x91, 0x51, 0x29, 0x18, 0x11,
0x58, 0x89, 0xCD, 0x15, 0xA3, 0x21, 0x0D, 0x88, 0x58, 0xE6, 0xF9, 0xD8, 0x45, 0x3C, 0xC9, 0x2F,
0x96, 0xE1, 0xB9, 0xE2, 0x91, 0xB9, 0x95, 0xF0, 0x94, 0x65, 0xF4, 0x61, 0x4B, 0x87, 0x92, 0xCC,
0x00, 0xB1, 0xBF, 0x0A, 0xE3, 0xE5, 0x92, 0x7B, 0xCE, 0xB6, 0xD5, 0x7B, 0x7D, 0x38, 0x76, 0xDC,
0x9E, 0x8F, 0x27, 0x09, 0x5B, 0x23, 0xFE, 0x36, 0xE5, 0x4A, 0x6F, 0x79, 0x8D, 0x16, 0x7E, 0x2D,
0xB5, 0x2E, 0xD5, 0x82, 0x68, 0x6E, 0xC8, 0xA2, 0x45, 0x92, 0x05, 0x96, 0xAA, 0x2E, 0x40, 0x9F,
0x06, 0x9B, 0x30, 0x4D, 0x1C, 0x83, 0xBC, 0xE9, 0x62, 0x87, 0x89, 0x85, 0x37, 0xCF, 0x8E, 0x27,
0x39, 0x0F, 0x29, 0xCE, 0xAA, 0xB7, 0xC4, 0x33, 0x5D, 0x3F, 0x25, 0xB6, 0x59, 0x46, 0xCB, 0x7D,
0x6A, 0x39, 0x79, 0x22, 0x78, 0x92, 0x62, 0x85, 0x7A, 0xD0, 0x33, 0x90, 0x01, 0x0C, 0x4A, 0xE0,
0xBF, 0xB4, 0xEA, 0x19, 0x5F, 0x3F, 0xAF, 0xBE, 0x15, 0xC5, 0xCB, 0x9E, 0x85, 0x90, 0x48, 0x4A,
0x6C, 0xC6, 0x0B, 0x6A, 0x73, 0x98, 0xCD, 0x70, 0x5F, 0x58, 0x79, 0xC0, 0x6A, 0x6B, 0x80, 0x20,
0x59, 0x72, 0x13, 0xC2, 0x36, 0x13, 0x74, 0x5B, 0x34, 0xEF, 0x6C, 0x79, 0x56, 0x39, 0xE3, 0x9B,
0xBD, 0x92, 0xE5, 0xD2, 0x20, 0x83, 0x03, 0xEA, 0x82, 0x24, 0x21, 0xC3, 0x75, 0xB9, 0xA4, 0x3B,
0x8D, 0x8D, 0x7A, 0xBA, 0x3C, 0xEC, 0x32, 0x18, 0x64, 0xA1, 0xC9, 0x4B, 0x56, 0xE1, 0x7B, 0x9D,
0xEC, 0x2A, 0x8A, 0xE1, 0x31, 0xD4, 0x37, 0xBE, 0x6F, 0x31, 0x2D, 0x2C, 0xDC, 0x2C, 0x1B, 0x06,
0x95, 0xC5, 0x25, 0x58, 0x54, 0xEA, 0x13, 0xDB, 0xC6, 0x5E, 0x6E, 0x73, 0x1C, 0xCD, 0x76, 0xFC,
0xC7, 0xF1, 0x96, 0x5F, 0x5E, 0xCC, 0x9E, 0x4E, 0x5C, 0xF0, 0x67, 0x00, 0xD9, 0x27, 0x03, 0x72,
0xC9, 0xAF, 0x58, 0x2E, 0x0A, 0x82, 0x86, 0xCA, 0xF7, 0xE2, 0x99, 0x87, 0x0B, 0x82, 0xC4, 0x26,
0x77, 0x0A, 0xB1, 0x1B, 0xAA, 0x4B, 0x7B, 0x74, 0xEE, 0x9E, 0xB8, 0x2F, 0x16, 0xC3, 0x0A, 0xA0,
0xDA, 0x50, 0x73, 0xCB, 0x72, 0x55, 0x8C, 0x9A, 0x75, 0xA9, 0xCD, 0xC7, 0x8F, 0x9E, 0x3E, 0x79,
0x72, 0x56, 0x7F, 0xEC, 0x75, 0x83, 0x61, 0xFC, 0xF9, 0xBB, 0xB8, 0x05, 0x8B, 0x5E, 0xC6, 0x60,
0x21, 0x1A, 0x5C, 0x1C, 0x0B, 0x6E, 0x73, 0x12, 0x1C, 0x83, 0x08, 0x2B, 0x84, 0x8A, 0x63, 0x63,
0x99, 0x5C, 0x09, 0x49, 0x00, 0x4E, 0xDA, 0x45, 0xFE, 0x12, 0x12, 0x41, 0x26, 0x7C, 0x5A, 0x11,
0x29, 0x4D, 0x15, 0x9E, 0xDD, 0xA5, 0xE3, 0x79, 0xD1, 0x85, 0x36, 0xB1, 0xDB, 0xC7, 0x54, 0xD8,
0x5E, 0xC5, 0x10, 0x86, 0x89, 0xE1, 0x7C, 0x33, 0xB2, 0x82, 0x26, 0x95, 0x2F, 0x36, 0x7B, 0x66,
0xFD, 0x2F, 0xA7, 0x76, 0x7C, 0x34, 0xC0, 0xDC, 0xDB, 0xE3, 0xCE, 0xD5, 0x6C, 0xE6, 0x21, 0x48,
0x47, 0xAA, 0xCD, 0x77, 0x58, 0x38, 0x2E, 0xC0, 0xBB, 0xD4, 0xAC, 0x0B, 0x5C, 0x64, 0x08, 0xE6,
0xE7, 0x57, 0x13, 0x11, 0xE3, 0x15, 0x75, 0x11, 0x09, 0x7F, 0x59, 0x23, 0x90, 0x60, 0x47, 0x87,
0xC2, 0xB3, 0xEE, 0x90, 0x1B, 0x82, 0x69, 0x2B, 0x65, 0xB5, 0xF9, 0x9F, 0xBF, 0x9E, 0x5F, 0x69,
0x10, 0x64, 0xE5, 0x71, 0xA5, 0x5A, 0x2E, 0xEB, 0x17, 0xC7, 0x92, 0x64, 0x63, 0x5E, 0x4F, 0xD5,
0xE6, 0x8D, 0x60, 0x55, 0x3D, 0x07, 0x56, 0xE5, 0x6A, 0x6D, 0x7B, 0x56, 0xE7, 0x6A, 0x53, 0x70,
0x02, 0x26, 0xE3, 0x27, 0x67, 0xE7, 0xDB, 0x33, 0x7A, 0x02, 0x32, 0xFD, 0x01, 0x9C, 0xCE, 0x41,
0xBB, 0xB3, 0x5D, 0x94, 0x3B, 0x53, 0x9B, 0x9C, 0xCF, 0x59, 0xAD, 0x3C, 0xAE, 0x9D, 0xEF, 0xC0,
0xE7, 0x54, 0x8D, 0xB7, 0x92, 0xDC, 0x65, 0x93, 0x96, 0xDA, 0x6C, 0xFF, 0xFA, 0x4C, 0xAB, 0x81,
0x8C, 0xD5, 0xA7, 0x67, 0xDB, 0xF3, 0xAE, 0xA9, 0xCD, 0xDF, 0xB8, 0x90, 0x27, 0x55, 0x60, 0x54,
0xDB, 0x41, 0xC8, 0x13, 0xB5, 0xF9, 0x42, 0x70, 0x02, 0x2E, 0xE3, 0xCA, 0x93, 0x1D, 0x44, 0x02,
0xF7, 0xFA, 0x4D, 0x70, 0x02, 0xFF, 0xE2, 0xEE, 0xF5, 0x40, 0x4E, 0x90, 0x28, 0x85, 0x69, 0xEE,
0x89, 0xD3, 0xC5, 0xEC, 0x93, 0xBB, 0x7D, 0x5F, 0x18, 0x7F, 0x0A, 0x21, 0xA7, 0xB3, 0xC9, 0xC6,
0x41, 0x1C, 0x8F, 0x03, 0x95, 0x64, 0xE3, 0x61, 0xF1, 0x9B, 0x91, 0x24, 0x7D, 0x4A, 0xA0, 0x36,
0x2B, 0xE5, 0x35, 0x1A, 0x88, 0xB1, 0xD9, 0x2C, 0x28, 0x06, 0xE7, 0x14, 0x50, 0x15, 0x60, 0x25,
0x62, 0x58, 0x19, 0xA0, 0x31, 0xF8, 0xE8, 0x89, 0x9A, 0x89, 0xEB, 0xAD, 0x52, 0xC4, 0x12, 0x69,
0xD1, 0x58, 0x6D, 0x9E, 0x9D, 0xAC, 0xB3, 0xF7, 0x0E, 0x70, 0x74, 0x45, 0x05, 0xF7, 0x70, 0x10,
0x6C, 0x8C, 0xC8, 0x6C, 0xA8, 0xDA, 0x6C, 0xA5, 0xED, 0x5D, 0x70, 0x29, 0x56, 0x77, 0xC0, 0x25,
0x23, 0x8E, 0x84, 0xA6, 0x58, 0x8D, 0xA1, 0xA9, 0xAA, 0xB3, 0x88, 0xF8, 0x92, 0xC0, 0xAC, 0x93,
0x76, 0x17, 0x5C, 0x78, 0x11, 0xF7, 0x51, 0xC0, 0x36, 0x46, 0x25, 0x19, 0x08, 0x69, 0x2D, 0x6E,
0x1D, 0x0C, 0x91, 0x54, 0x94, 0xEF, 0x00, 0x8F, 0x00, 0xB1, 0xD0, 0x17, 0x4F, 0xDF, 0x37, 0x46,
0x64, 0x36, 0x14, 0xEA, 0x61, 0xDA, 0x3E, 0x18, 0x2A, 0x19, 0x71, 0xBE, 0x07, 0x5C, 0x86, 0xD8,
0x22, 0xC8, 0x7D, 0x8F, 0x1D, 0x07, 0x4A, 0xD6, 0xE6, 0xD8, 0xE4, 0x86, 0x03, 0x3E, 0xF2, 0x5A,
0xE9, 0x88, 0xEB, 0x8D, 0xD7, 0x88, 0x73, 0xEC, 0xBE, 0xD4, 0x42, 0xB1, 0xBC, 0x7C, 0xDD, 0xF2,
0x9A, 0xA6, 0x72, 0x6E, 0xB9, 0x42, 0xA8, 0x00, 0x13, 0xDC, 0x13, 0x7B, 0xBE, 0xAD, 0x79, 0x54,
0xD5, 0xE6, 0x73, 0x1F, 0x4D, 0xC4, 0xCF, 0xB0, 0xBB, 0x2C, 0x7A, 0xDE, 0x61, 0x5B, 0xF9, 0x1D,
0x36, 0x72, 0xBB, 0xAC, 0xC0, 0x9E, 0xFB, 0x18, 0x7B, 0xBB, 0x71, 0x39, 0x85, 0x62, 0x06, 0x8D,
0xDD, 0x98, 0xC0, 0x82, 0xF5, 0x06, 0x0F, 0x09, 0xFA, 0x16, 0x16, 0x5C, 0x68, 0xD4, 0xDD, 0x38,
0x2C, 0x60, 0x8C, 0xDA, 0xBC, 0xFA, 0xB3, 0xB5, 0x71, 0x92, 0x92, 0x0F, 0x9F, 0x1E, 0xE2, 0xE1,
0x32, 0x3B, 0xC5, 0x02, 0xAA, 0x0B, 0x9B, 0xCD, 0xE5, 0x91, 0xF3, 0xD0, 0x0D, 0xE7, 0x12, 0xBD,
0x12, 0x01, 0xC5, 0xF3, 0x19, 0x35, 0xA3, 0xE6, 0xC3, 0x74, 0xFC, 0x7A, 0x19, 0x0C, 0x84, 0x78,
0xDF, 0x43, 0x64, 0xF3, 0xBA, 0x92, 0x0C, 0x14, 0x48, 0x29, 0xCF, 0xA1, 0xB5, 0x2F, 0xB8, 0xE4,
0xB4, 0x07, 0xC3, 0x2C, 0xD6, 0xFA, 0xD0, 0xC0, 0x81, 0x20, 0x03, 0x6A, 0x6F, 0xFE, 0x38, 0x22,
0x1E, 0xA7, 0x36, 0x01, 0xB5, 0x57, 0xD0, 0xD8, 0xB8, 0xCA, 0x24, 0x0C, 0xBE, 0x72, 0x79, 0xB9,
0x0A, 0x19, 0xDD, 0xA5, 0xB2, 0xDC, 0x84, 0x9E, 0x37, 0xD9, 0xA5, 0xAC, 0xB4, 0x5D, 0x1A, 0xDA,
0xDB, 0x73, 0x80, 0x9A, 0xF2, 0xC6, 0x71, 0x88, 0xB5, 0x7D, 0x55, 0x82, 0x8A, 0xF2, 0x82, 0x0E,
0x1E, 0x38, 0xFE, 0x2B, 0x67, 0x71, 0x6C, 0x6D, 0x9E, 0x20, 0xB0, 0x05, 0x28, 0x76, 0xDA, 0xCA,
0x4D, 0xE7, 0xF5, 0xCD, 0x9B, 0x77, 0xFB, 0xC9, 0x0E, 0x30, 0xE7, 0x81, 0x12, 0x03, 0xD7, 0xF6,
0xD0, 0x39, 0x01, 0x84, 0xA8, 0x6E, 0x83, 0x53, 0x55, 0x02, 0x75, 0x7D, 0xF3, 0x76, 0x5F, 0x28,
0x55, 0x0F, 0x07, 0x53, 0xF5, 0x5B, 0xC0, 0xE9, 0xBD, 0x8B, 0xEF, 0xB0, 0xBB, 0x05, 0x56, 0x72,
0x20, 0xC7, 0x4B, 0x79, 0xC9, 0x5B, 0x07, 0xDB, 0xC8, 0xA5, 0xA2, 0x7C, 0x07, 0xDB, 0x38, 0xF0,
0x8A, 0xF7, 0x42, 0xE8, 0x6D, 0x82, 0x47, 0x8E, 0x54, 0x9B, 0x9D, 0xF1, 0x90, 0x06, 0xA1, 0xFF,
0xC0, 0x82, 0xBA, 0x1C, 0x91, 0x5D, 0x9E, 0x0C, 0xCE, 0x44, 0x91, 0x88, 0x24, 0x8F, 0x06, 0xF9,
0x93, 0xFD, 0x14, 0x93, 0x6A, 0xB9, 0xF6, 0x45, 0x51, 0xE1, 0xCC, 0xBF, 0x26, 0x30, 0xBD, 0x2D,
0xEA, 0x4E, 0x8F, 0xD7, 0x9D, 0xE7, 0xED, 0xFD, 0xA4, 0xB2, 0xDE, 0xC1, 0x0A, 0x4E, 0xEF, 0xA0,
0x05, 0x47, 0x91, 0xBF, 0x76, 0xA6, 0x30, 0x6D, 0xB9, 0x89, 0x88, 0x07, 0xC2, 0xDE, 0x79, 0x9B,
0x0D, 0x44, 0xF6, 0xA1, 0xFA, 0x78, 0x97, 0xD0, 0x49, 0xC4, 0xC8, 0x47, 0xCE, 0xC9, 0x2C, 0x6E,
0x4E, 0xBF, 0x68, 0xD4, 0x9C, 0xAC, 0x95, 0x76, 0x97, 0xA0, 0xE1, 0x9A, 0x58, 0x98, 0xB8, 0xFC,
0xA5, 0xC7, 0x4D, 0x01, 0xC9, 0x8C, 0x95, 0x98, 0x28, 0x6D, 0x79, 0xB5, 0x0B, 0x36, 0xD5, 0x5D,
0xB0, 0xC9, 0x4A, 0x94, 0x87, 0xE7, 0xEC, 0x2B, 0x55, 0x9A, 0x4A, 0xF5, 0xFC, 0x6B, 0xC2, 0xD3,
0x1D, 0x6E, 0x9E, 0xD3, 0x60, 0x8C, 0xDA, 0x6C, 0xBD, 0xDD, 0x4F, 0x4E, 0xE3, 0x93, 0x3D, 0x30,
0xA7, 0xED, 0x94, 0xC1, 0x84, 0x52, 0x87, 0x5E, 0x8A, 0x8D, 0xB6, 0x40, 0x63, 0xC4, 0x05, 0xFF,
0x73, 0x4F, 0x68, 0x8C, 0x1E, 0x8E, 0xC6, 0x17, 0xAE, 0x30, 0xA3, 0x6F, 0x01, 0x1F, 0x1F, 0x8D,
0xDE, 0xF7, 0x06, 0x68, 0x63, 0x8C, 0xE2, 0x71, 0x6A, 0xF3, 0x1D, 0x1A, 0x29, 0xCF, 0x5F, 0x5D,
0xED, 0x05, 0xAB, 0x64, 0xD2, 0xC3, 0xE0, 0x95, 0xAA, 0x7C, 0x68, 0xCC, 0x5C, 0xEC, 0x6D, 0x1E,
0x54, 0x7C, 0x90, 0xDA, 0x7C, 0x89, 0xBD, 0x40, 0x69, 0x53, 0x3F, 0x3E, 0x76, 0xB4, 0x17, 0xD4,
0xC4, 0xCC, 0x87, 0x81, 0x4C, 0x2A, 0x7D, 0x68, 0xBC, 0xFA, 0x03, 0xE2, 0xFB, 0xD4, 0xDF, 0x18,
0xB2, 0x78, 0x9C, 0xDA, 0x7C, 0x51, 0x7C, 0x25, 0x5A, 0x7B, 0x81, 0x2B, 0x99, 0xF5, 0x30, 0x88,
0xA5, 0x3A, 0x1F, 0x1A, 0x34, 0xDB, 0x1A, 0x6D, 0x0C, 0x18, 0x8C, 0x51, 0x9B, 0xD7, 0xED, 0x3F,
0x15, 0xED, 0x9A, 0x8E, 0x3C, 0xFE, 0x36, 0x99, 0xD2, 0x79, 0xAD, 0xEF, 0x05, 0x35, 0x3E, 0xF5,
0x61, 0x10, 0x13, 0x4A, 0x1F, 0x1A, 0x2D, 0xF1, 0x66, 0x69, 0x17, 0x6D, 0x1E, 0x63, 0xC9, 0x40,
0xFE, 0x42, 0x05, 0xB4, 0x94, 0x16, 0xDA, 0x4F, 0x94, 0xA5, 0xF3, 0xEE, 0x63, 0x25, 0x38, 0x53,
0xF2, 0xD0, 0x38, 0x39, 0xC8, 0xC2, 0xEF, 0x6D, 0xCC, 0xB6, 0xF9, 0x35, 0x3F, 0x33, 0x56, 0x6D,
0x3E, 0x83, 0x0B, 0xE5, 0x5A, 0x5C, 0xEC, 0xAB, 0x8E, 0x65, 0xE7, 0xDF, 0x07, 0x6A, 0x39, 0x7D,
0xBF, 0x09, 0xE0, 0x60, 0xD5, 0x40, 0x7B, 0xDE, 0x56, 0x2F, 0xE9, 0xE6, 0x86, 0xC7, 0xF0, 0xBD,
0x93, 0xD7, 0xFB, 0x05, 0x70, 0x26, 0xC4, 0xDE, 0x30, 0xCC, 0xE8, 0xBD, 0x0F, 0x18, 0x93, 0x37,
0xDC, 0xC5, 0x5E, 0x53, 0x1E, 0x6C, 0x5D, 0x87, 0x94, 0x24, 0x93, 0xCF, 0x03, 0x30, 0x2B, 0x06,
0x8C, 0xB8, 0xAE, 0xDA, 0x7C, 0x8E, 0x99, 0x72, 0xC3, 0x9B, 0x17, 0xC7, 0x92, 0xE0, 0xE1, 0x5C,
0xE2, 0xB7, 0xC8, 0xF9, 0x61, 0x64, 0x34, 0x50, 0x9B, 0x37, 0xFC, 0x64, 0x2E, 0xF0, 0xE2, 0x57,
0x9B, 0x33, 0x13, 0x46, 0xC4, 0x9E, 0x4F, 0x41, 0xA8, 0x14, 0xA4, 0xF8, 0xFC, 0xA3, 0xAA, 0x24,
0xAD, 0x4C, 0x5F, 0xB3, 0x23, 0x88, 0x15, 0xEE, 0x65, 0xEB, 0xA7, 0xE3, 0x3F, 0xED, 0x59, 0xAB,
0x7F, 0x01, 0xBC, 0x38, 0xF6, 0xD0, 0x12, 0x73, 0xAF, 0x40, 0xE1, 0x42, 0x1E, 0x8D, 0x5E, 0xC1,
0x2A, 0x7D, 0x43, 0x5F, 0x58, 0x62, 0x76, 0x48, 0x23, 0x55, 0x6B, 0xEE, 0xF0, 0x46, 0xF2, 0x14,
0xF0, 0x61, 0x41, 0x2B, 0x8E, 0x71, 0xC4, 0xF5, 0x90, 0x37, 0x53, 0xF3, 0xFF, 0xEF, 0xBF, 0xEB,
0x7C, 0x86, 0x0C, 0x7A, 0x19, 0xC1, 0x54, 0x25, 0xF0, 0xAD, 0x86, 0xBA, 0xEA, 0x7D, 0xFF, 0x15,
0x9A, 0x1F, 0x2F, 0x53, 0x7D, 0x8E, 0x78, 0x89, 0xAD, 0x2F, 0x02, 0xCB, 0x27, 0x43, 0xD6, 0xFC,
0xC1, 0xA6, 0x56, 0x38, 0xC0, 0x1E, 0x2B, 0x21, 0xDB, 0xEE, 0xDC, 0x41, 0xE3, 0x25, 0x09, 0x18,
0x06, 0x2B, 0x68, 0x85, 0xEB, 0x37, 0xAF, 0xDA, 0xF2, 0xDC, 0xC3, 0x4B, 0x8A, 0x6C, 0x6C, 0x17,
0x0C, 0x27, 0xF4, 0x04, 0x1F, 0x4D, 0x9F, 0x26, 0x4D, 0xA5, 0xAB, 0xB5, 0xF4, 0xA9, 0x0B, 0x4E,
0xDB, 0xAE, 0xCB, 0xF4, 0xA0, 0xB5, 0x4A, 0x3C, 0xC6, 0xF5, 0xA9, 0x85, 0x02, 0x5C, 0x48, 0x02,
0xBD, 0x60, 0xB6, 0x1B, 0xAD, 0x52, 0xBC, 0xF6, 0xB9, 0xAC, 0xF0, 0x53, 0x34, 0xA0, 0xF4, 0x6D,
0x5D, 0x10, 0x89, 0xE7, 0x54, 0x05, 0x53, 0xB4, 0xE5, 0x2F, 0xBE, 0x45, 0xEA, 0x61, 0x39, 0x44,
0x3C, 0x0D, 0xCB, 0x12, 0x4B, 0xCF, 0x4A, 0xA8, 0xC3, 0xEE, 0x80, 0x30, 0x4E, 0x59, 0xA8, 0x14,
0x62, 0xAA, 0x38, 0x95, 0x98, 0x3E, 0x66, 0xA1, 0xEF, 0xD5, 0x23, 0x00, 0x36, 0x60, 0xCA, 0x75,
0xE3, 0xC3, 0x8F, 0x53, 0x2B, 0x3A, 0x16, 0x6F, 0x50, 0x52, 0xF7, 0xF2, 0x0E, 0xF9, 0x8D, 0x1F,
0xA7, 0xAD, 0x12, 0xB1, 0xA3, 0xC7, 0x30, 0x07, 0xB4, 0xDB, 0xD1, 0x87, 0xBA, 0xC3, 0x8F, 0xF1,
0x6B, 0xD7, 0x7A, 0x89, 0xF5, 0xB1, 0xA7, 0x75, 0x1A, 0xCD, 0x29, 0x1F, 0x4D, 0x5D, 0x5C, 0x72,
0x69, 0x4F, 0xFB, 0xE0, 0xE3, 0x4F, 0x21, 0x06, 0x66, 0x8C, 0x2A, 0x3F, 0x4E, 0xAF, 0x23, 0xC5,
0x21, 0x1E, 0x09, 0xFA, 0xD8, 0x36, 0x94, 0x80, 0x21, 0x16, 0x06, 0x26, 0x74, 0x77, 0x4A, 0xB2,
0x1D, 0x7D, 0xD0, 0x23, 0x3D, 0x82, 0x69, 0x14, 0xAB, 0x91, 0x5A, 0xD9, 0xA5, 0x96, 0x78, 0x4F,
0xB0, 0x44, 0x7D, 0xD2, 0x23, 0x5E, 0x5D, 0xCA, 0x86, 0x1B, 0x2D, 0x98, 0x09, 0xCC, 0xC3, 0x5D,
0x8A, 0x03, 0xC0, 0xD1, 0xD0, 0x0A, 0xD2, 0x0F, 0x0B, 0x7A, 0x64, 0x38, 0x0B, 0x04, 0x3E, 0x1E,
0xD0, 0x3B, 0x9C, 0xA5, 0xE9, 0x2D, 0x67, 0x92, 0xC4, 0x67, 0x41, 0x37, 0x5A, 0xE9, 0x01, 0xE6,
0xC6, 0x51, 0x39, 0x32, 0xFA, 0x2B, 0x99, 0xAE, 0x18, 0x53, 0x89, 0x0C, 0xD2, 0xD0, 0x5A, 0x46,
0xDB, 0xB8, 0xD6, 0x61, 0xE4, 0x75, 0xE3, 0x48, 0xF3, 0x42, 0xD7, 0x3D, 0x6A, 0x5C, 0xEB, 0xFF,
0xFE, 0x7B, 0x5D, 0xE7, 0x4E, 0xD0, 0xA9, 0xCF, 0x10, 0x6F, 0x34, 0x1A, 0xD2, 0x15, 0x2E, 0xC1,
0x90, 0x29, 0xF6, 0x46, 0xBB, 0x71, 0x74, 0xD4, 0x36, 0xD2, 0xEB, 0x46, 0x5B, 0x37, 0xC5, 0x7D,
0x01, 0xB4, 0x11, 0x7F, 0x43, 0xAF, 0x71, 0xFD, 0xF8, 0x71, 0xE7, 0xA8, 0xD1, 0x68, 0x5F, 0x72,
0x17, 0x33, 0x8F, 0xE0, 0x52, 0x2B, 0x20, 0x6C, 0x49, 0xBE, 0xC4, 0xBE, 0x6C, 0x5F, 0x62, 0xED,
0x4E, 0x37, 0x1D, 0xFE, 0x51, 0x40, 0xBD, 0xEC, 0x0D, 0xCD, 0xD1, 0x98, 0x6E, 0x60, 0x2D, 0xD0,
0x81, 0x39, 0xE6, 0x6D, 0x47, 0xB4, 0x0B, 0xC9, 0xAB, 0x2E, 0x19, 0x5A, 0x47, 0x1B, 0xEB, 0x26,
0xE6, 0x1F, 0x85, 0x7C, 0xE1, 0x48, 0x68, 0x60, 0xDE, 0xF6, 0x65, 0x5F, 0xF3, 0x74, 0xB3, 0x07,
0x1F, 0xBA, 0x1E, 0xD5, 0x53, 0x38, 0xC1, 0x1B, 0xFC, 0xC9, 0x8D, 0xF0, 0x58, 0xEA, 0x5F, 0xB9,
0xAE, 0x56, 0x90, 0xC7, 0xBA, 0x0A, 0x7A, 0x09, 0x2A, 0x51, 0x07, 0xF1, 0x68, 0x10, 0x36, 0xA6,
0x9E, 0xE5, 0x12, 0xEB, 0xB6, 0xA1, 0x71, 0xC3, 0x61, 0x08, 0x11, 0x79, 0xE0, 0xF4, 0x35, 0xB5,
0xB1, 0x1E, 0x45, 0x20, 0x9E, 0xF0, 0x3B, 0xE9, 0xA1, 0xD2, 0x7D, 0x3E, 0xC4, 0x3E, 0x98, 0xC6,
0x1C, 0x84, 0x99, 0xF4, 0x68, 0xA5, 0x55, 0xFA, 0x18, 0xF0, 0x20, 0x8C, 0x96, 0x90, 0xDC, 0x27,
0x5A, 0xBE, 0xC6, 0x66, 0x64, 0x6C, 0x83, 0x50, 0x44, 0x03, 0x50, 0xFE, 0x6E, 0x83, 0xBE, 0xFF,
0x18, 0x47, 0x15, 0xEE, 0xBA, 0x7A, 0xEC, 0x9D, 0x1F, 0x67, 0xEE, 0x0B, 0x75, 0xAA, 0xE3, 0x62,
0xDE, 0x6C, 0x4D, 0x7E, 0x05, 0xE7, 0x92, 0x99, 0x0B, 0xDC, 0xE4, 0x76, 0x1D, 0xCD, 0x2C, 0xBD,
0x02, 0xB5, 0xBB, 0x9A, 0x3A, 0xAD, 0x84, 0x40, 0x36, 0x58, 0x4D, 0x96, 0x2B, 0x75, 0x40, 0xEA,
0xAD, 0x26, 0xCD, 0x14, 0x32, 0x20, 0xA4, 0xAB, 0x09, 0xB3, 0xE9, 0x1B, 0x28, 0x87, 0x12, 0xAC,
0x11, 0xF1, 0x6C, 0x3A, 0x82, 0x98, 0xA6, 0x43, 0x0D, 0x44, 0x2A, 0x11, 0x0F, 0x74, 0x78, 0xF1,
0xFB, 0xAB, 0x97, 0x8D, 0x42, 0xB6, 0xC0, 0x16, 0x22, 0xE3, 0x93, 0x1C, 0xF0, 0xB1, 0xC4, 0xF3,
0x38, 0x87, 0xF2, 0xE7, 0x82, 0x79, 0x5E, 0x29, 0x70, 0x40, 0x39, 0xC5, 0x07, 0xF0, 0xC1, 0xDB,
0x05, 0x0E, 0x74, 0x98, 0x32, 0xA8, 0xBB, 0x79, 0x37, 0xE1, 0xF3, 0xCD, 0x98, 0x41, 0xE6, 0x42,
0x43, 0x80, 0x1F, 0x5F, 0xBE, 0xB7, 0xBA, 0x90, 0xAD, 0xAE, 0x11, 0xC3, 0x25, 0x8F, 0x8E, 0xC0,
0x0D, 0x24, 0xE7, 0xC8, 0xA0, 0x8B, 0xE3, 0xB1, 0xB8, 0x31, 0xC8, 0xDF, 0x90, 0xB0, 0xB6, 0xF2,
0xD3, 0x83, 0xB3, 0x67, 0x44, 0xAB, 0xB7, 0x2E, 0x61, 0xB8, 0xF9, 0x09, 0xB8, 0x1B, 0x5E, 0x7E,
0x74, 0x17, 0x82, 0x20, 0x32, 0xB6, 0xF2, 0xB3, 0x34, 0x16, 0xFA, 0x3C, 0xE1, 0x0B, 0x76, 0x3C,
0xB6, 0x53, 0x4F, 0xF3, 0x57, 0x83, 0xC3, 0xE3, 0x5B, 0x37, 0x82, 0x7B, 0x09, 0x32, 0x3F, 0xD7,
0x01, 0x2D, 0xBB, 0xC7, 0xC9, 0xE6, 0x7F, 0x4C, 0x2A, 0xE8, 0x75, 0x3F, 0x2F, 0x17, 0xA8, 0xE9,
0xEB, 0x86, 0x9F, 0x56, 0xAC, 0x15, 0x19, 0x25, 0x8A, 0x25, 0x0F, 0xEF, 0x11, 0x0C, 0x73, 0xC9,
0xEF, 0xEE, 0x25, 0xC8, 0xFE, 0x50, 0x0F, 0xB2, 0x84, 0x0B, 0xB2, 0x84, 0xBA, 0x11, 0xA6, 0xB2,
0xA4, 0x69, 0x2F, 0x99, 0x7D, 0x74, 0x0F, 0xF3, 0x24, 0xE1, 0xE9, 0xC6, 0x78, 0x35, 0x55, 0xEE,
0xBD, 0x3B, 0x10, 0x60, 0xB4, 0x20, 0xC0, 0x48, 0x37, 0x46, 0xA9, 0x00, 0x69, 0xCA, 0x4C, 0x04,
0x98, 0xAC, 0x09, 0x3F, 0xB9, 0xA1, 0x02, 0x19, 0x3E, 0xAF, 0x21, 0x9C, 0x25, 0x5F, 0xDD, 0xB8,
0xBA, 0x87, 0x36, 0x39, 0x38, 0x08, 0xB2, 0x5E, 0x2D, 0xC8, 0x7A, 0xA5, 0x1B, 0xA7, 0x17, 0x57,
0xB2, 0x90, 0x40, 0xF2, 0x26, 0xDA, 0x84, 0x67, 0x34, 0x83, 0x68, 0x9F, 0xF9, 0x37, 0x38, 0xEF,
0x64, 0x6E, 0x48, 0x9C, 0x57, 0xD3, 0x41, 0x97, 0x1A, 0x72, 0xB1, 0xCF, 0xB4, 0xC2, 0x5B, 0x17,
0xC3, 0x2A, 0x23, 0x7E, 0x95, 0x4F, 0x69, 0xFF, 0xFA, 0x4C, 0xA1, 0xBE, 0x22, 0x8E, 0xAD, 0x2B,
0x7E, 0x7A, 0xEC, 0x51, 0x91, 0x27, 0x93, 0x15, 0xCC, 0xFF, 0xAF, 0x07, 0x70, 0x29, 0x85, 0xF5,
0x49, 0xA0, 0x38, 0x98, 0x1F, 0x0A, 0xC0, 0x47, 0x1C, 0x7B, 0x4A, 0x6C, 0x25, 0x96, 0x42, 0x37,
0xF9, 0x95, 0xD6, 0xD5, 0x26, 0xBA, 0x71, 0x34, 0x49, 0x2C, 0x0A, 0x52, 0xF2, 0xDA, 0x92, 0x8A,
0x08, 0x32, 0x7E, 0x3E, 0x88, 0x8C, 0x9F, 0x73, 0x32, 0x7E, 0x06, 0xC0, 0x66, 0x11, 0xD0, 0x97,
0x12, 0x82, 0x1A, 0x65, 0x3D, 0xAE, 0x85, 0x50, 0xBA, 0xEA, 0xD9, 0x65, 0x66, 0xBC, 0xA8, 0x94,
0x57, 0xF2, 0x0C, 0xF0, 0xC5, 0xB1, 0xFC, 0xFF, 0xCB, 0xFE, 0x0F, 0x86, 0xED, 0x24, 0xF8, 0xD7,
0x4C, 0x00, 0x00
};
setup.ino
// Setup
void setup()
{
Serial.begin(115200);
Serial.setDebugOutput(true);
Serial.println();
// Delay
delay( 100 );
// Camera Setup
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = Y2_GPIO_NUM;
config.pin_d1 = Y3_GPIO_NUM;
config.pin_d2 = Y4_GPIO_NUM;
config.pin_d3 = Y5_GPIO_NUM;
config.pin_d4 = Y6_GPIO_NUM;
config.pin_d5 = Y7_GPIO_NUM;
config.pin_d6 = Y8_GPIO_NUM;
config.pin_d7 = Y9_GPIO_NUM;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_sscb_sda = SIOD_GPIO_NUM;
config.pin_sscb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.xclk_freq_hz = 20000000;
config.pixel_format = PIXFORMAT_JPEG;
// Init with high specs to pre-allocate larger buffers
if(psramFound()){
config.frame_size = FRAMESIZE_UXGA;
config.jpeg_quality = 10;
config.fb_count = 2;
} else {
config.frame_size = FRAMESIZE_SVGA;
config.jpeg_quality = 12;
config.fb_count = 1;
}
// Camera init
esp_err_t err = esp_camera_init(&config);
if (err != ESP_OK) {
//Serial.printf("Camera init failed with error 0x%x", err);
return;
}
// Drop down frame size for higher initial frame rate
sensor_t * s = esp_camera_sensor_get();
// 320x240 for better WiFi performance
s->set_framesize(s, FRAMESIZE_QVGA);
// Set camera rotation 180 degrees
// Horizontal mirror
s->set_hmirror(s, 0);
// Vertical flip
s->set_vflip(s, 1);
// WiFi
WiFi.softAP(ssid1, password1);
IPAddress myIP = WiFi.softAPIP();
Serial.print("AP IP address: ");
Serial.println(myIP);
Serial.print("Camera Ready! Use 'http://");
Serial.print(WiFi.softAPIP());
//WiFi.softAPIP();
WiFiAddr = WiFi.softAPIP().toString();
Serial.println("' to connect");
startCameraServer();
// Delay 1 Second
//delay( 1000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Consultant, R&D, Electronics, IoT, Teacher and Instructor
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank , Underwater and UAV Vehicle
- Unmanned Vehicles Terrestrial, Marine and UAV
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2026
https://www.donluc.com/luc/LucPaquinCVEng2026Mk01.pdf
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
DFRobot: https://learn.dfrobot.com/user-10186.html
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Hackster: https://www.hackster.io/luc-paquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc