——
#DonLucElectronics #DonLuc #DFRobot #SHT40 #FireBeetle2ESP32E #EEPROM #RTC #SD #Display #Adafruit #ESP32 #IoT #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Adafruit SHARP Memory Display Breakout – 1.3″ 168×144 Monochrome
The 1.3″ 168×144 SHARP Memory LCD display is a cross between an eInk (e-Paper) display and an LCD. It has the ultra-low power usage of eInk and the fast-refresh rates of an LCD. This model has a gray background, and pixels show up as black-on-gray for a nice e-Reader type display. It does not have a backlight, but it is daylight readable. For dark/night reading you may need to illuminate the LCD area with external LEDs.
The bare display is 3 Volt powered and 3 Volt logic, so we placed it on a fully assembled & tested breakout board with a 3 Volt regulator and level shifting circuitry. Now you can use it safely with 3 Volt or 5 Volt power and logic. There are four mounting holes so you can easily attach it to a box.
The display is “Write Only” which means that it only needs 3 pins to send data. However, the downside of a write-only display is that the entire 168×144 bits must be buffered by the microcontroller driver. That means you cannot use this with an ATmega328 or ATmega32u4. You must use a high-RAM chip such as ATSAMD21, Teensy 3, ESP8266, ESP32, etc. On those chips, this display works great and looks wonderful.
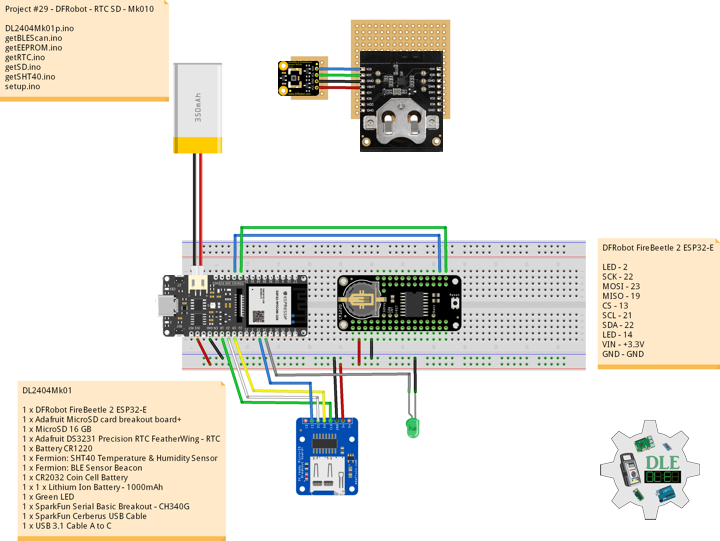
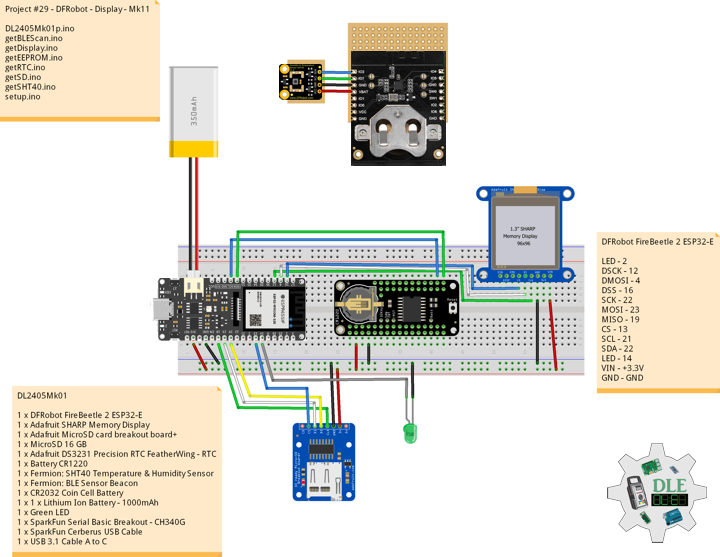
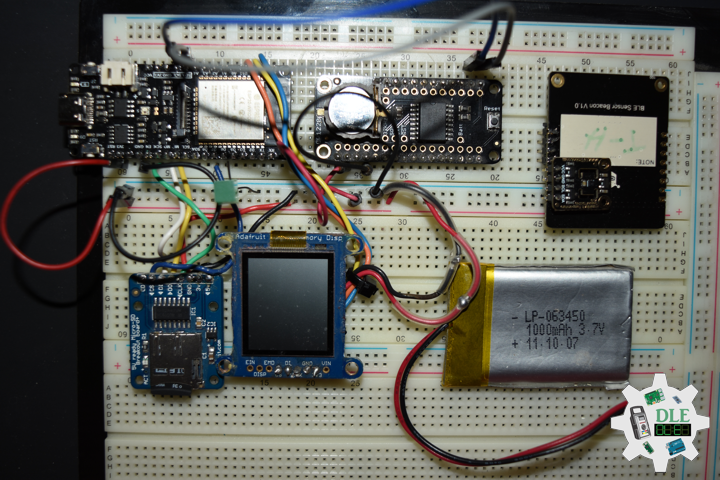
DL2405Mk01
1 x DFRobot FireBeetle 2 ESP32-E
1 x Adafruit SHARP Memory Display
1 x Adafruit MicroSD card breakout board+
1 x MicroSD 16 GB
1 x Adafruit DS3231 Precision RTC FeatherWing – RTC
1 x Battery CR1220
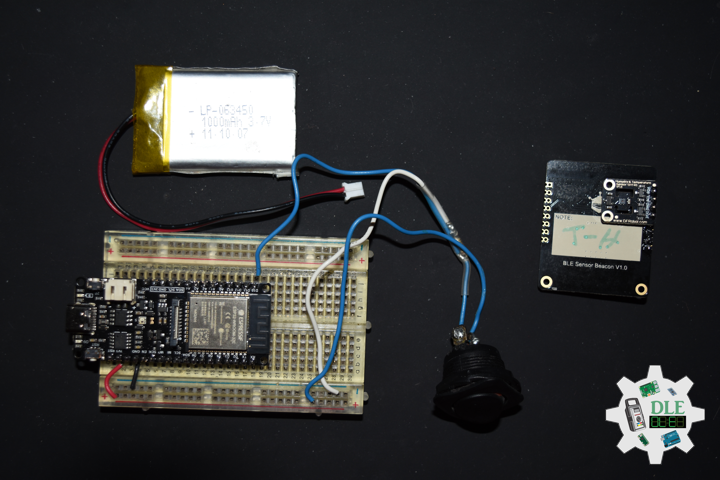
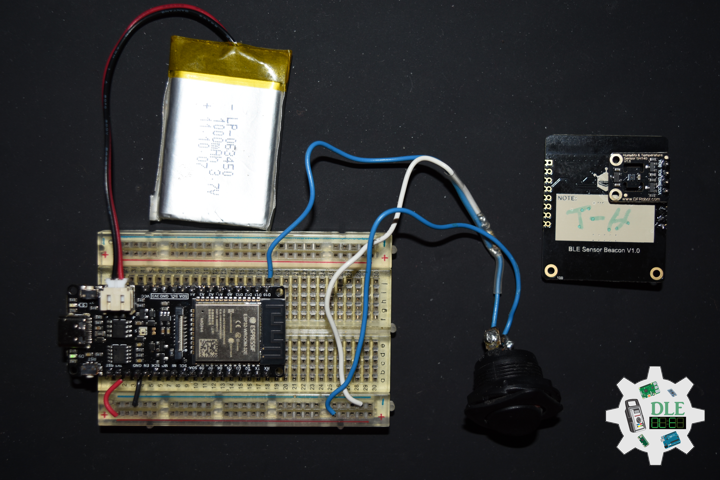
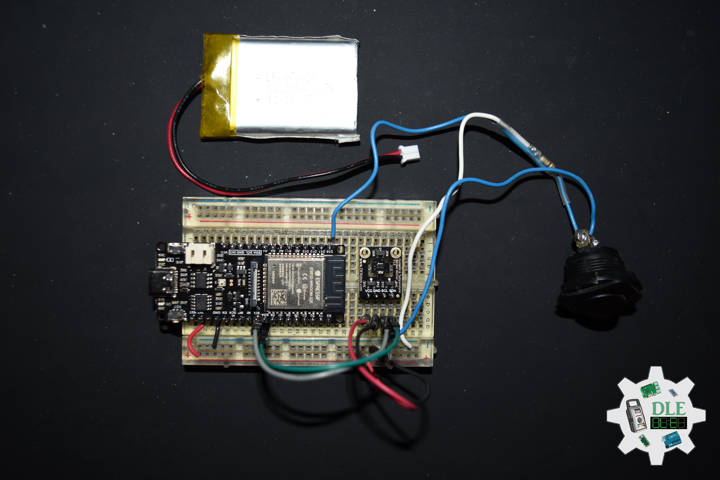
1 x Fermion: SHT40 Temperature & Humidity Sensor
1 x Fermion: BLE Sensor Beacon
1 x CR2032 Coin Cell Battery
1 x 1 x Lithium Ion Battery – 1000mAh
1 x Green LED
1 x SparkFun Serial Basic Breakout – CH340G
1 x SparkFun Cerberus USB Cable
1 x USB 3.1 Cable A to C
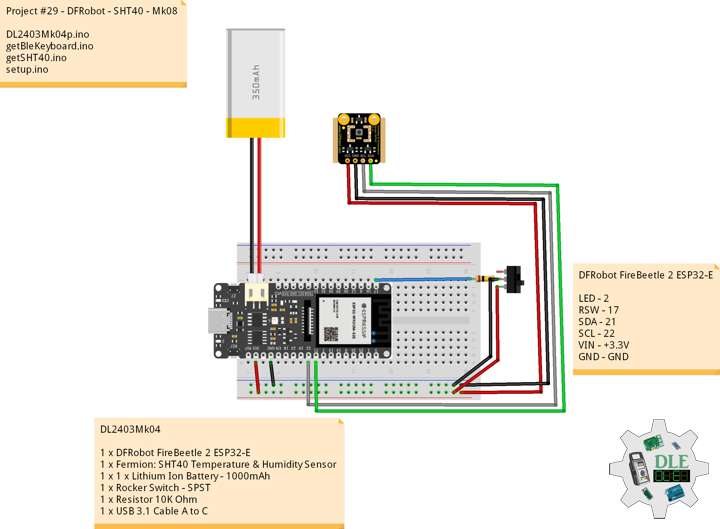
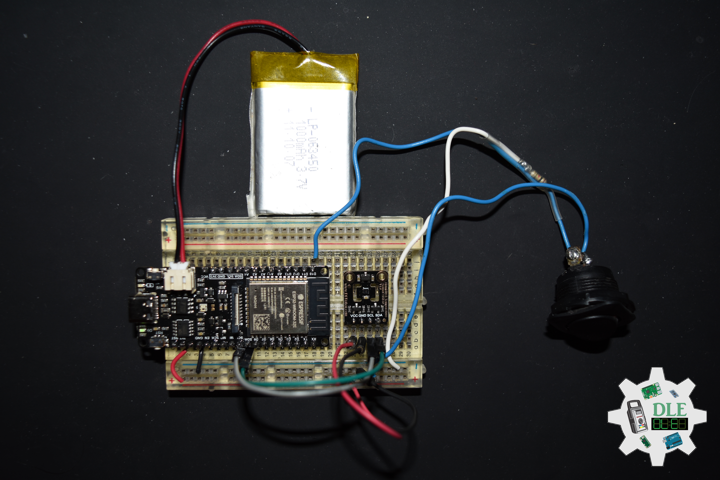
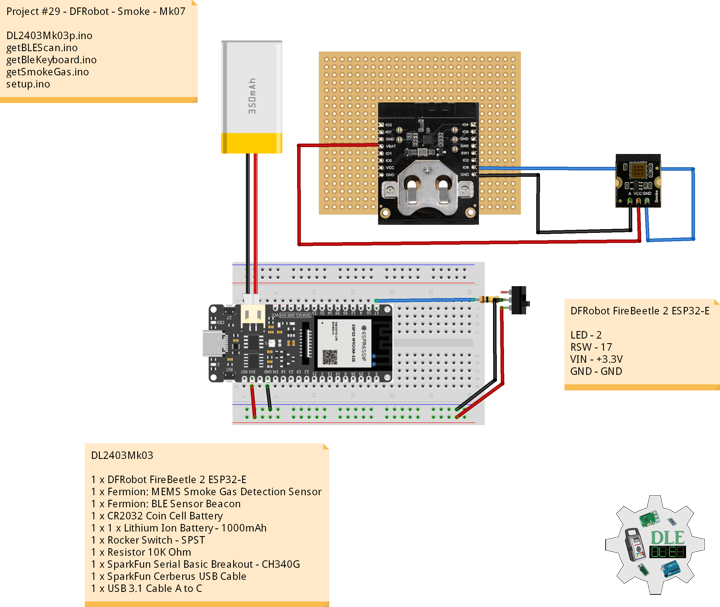
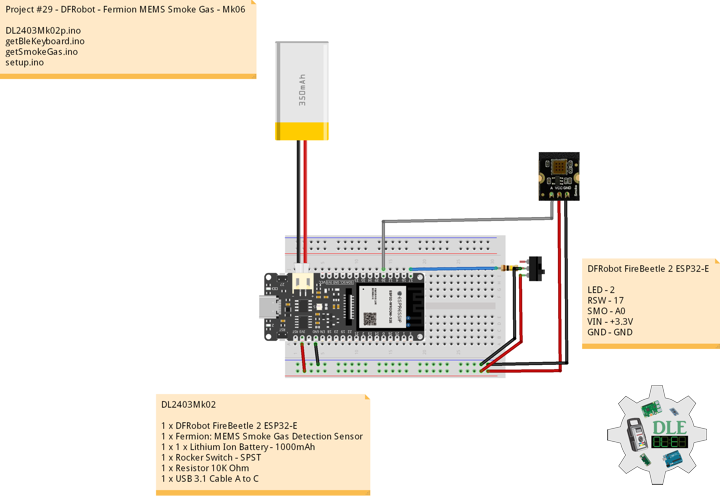
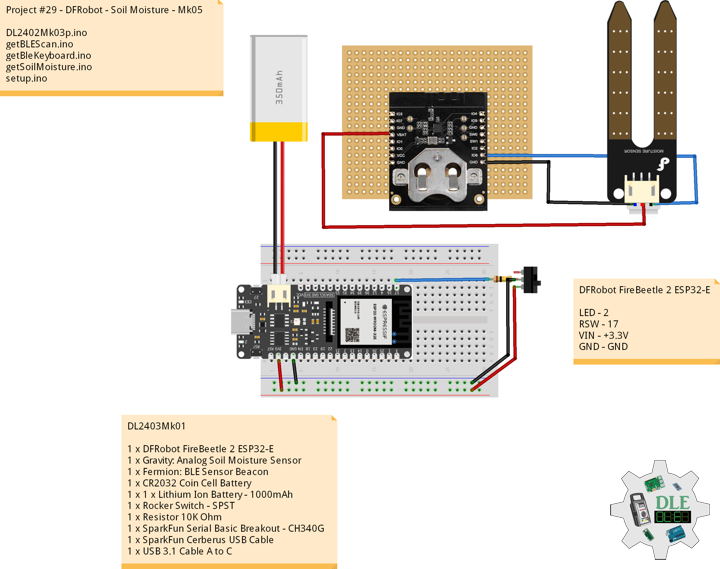
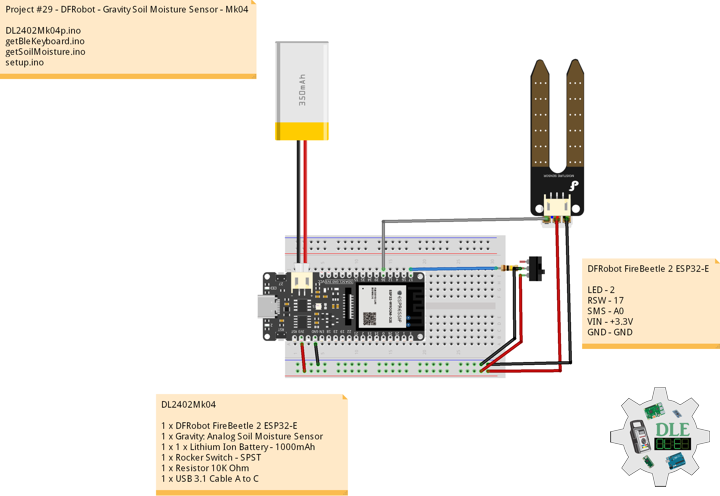
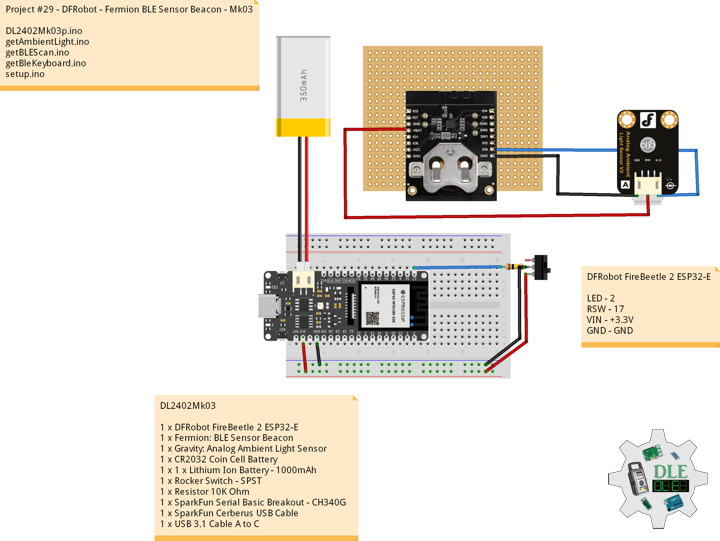
DFRobot FireBeetle 2 ESP32-E
LED – 2
DSCK – 12
DMOSI – 4
DSS – 16
SCK – 22
MOSI – 23
MISO – 19
CS – 13
SCL – 21
SDA – 22
LED – 14
VIN – +3.3V
GND – GND
——
DL2405Mk01p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #29 - DFRobot - Display - Mk11
29-11
DL2404Mk01p.ino
1 x DFRobot FireBeetle 2 ESP32-E
1 x Adafruit SHARP Memory Display
1 x Adafruit MicroSD card breakout board+
1 x MicroSD 16 GB
1 x Adafruit DS3231 Precision RTC FeatherWing - RTC
1 x Battery CR1220
1 x Fermion: SHT40 Temperature & Humidity Sensor
1 x Fermion: BLE Sensor Beacon
1 x CR2032 Coin Cell Battery
1 x 1 x Lithium Ion Battery - 1000mAh
1 x Green LED
1 x SparkFun Serial Basic Breakout - CH340G
1 x SparkFun Cerberus USB Cable
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM
// with Unique ID for Unit
#include "EEPROM.h"
// Wire
#include <Wire.h>
// Arduino
#include <Arduino.h>
// BLE Device
#include <BLEDevice.h>
// BLE Utils
#include <BLEUtils.h>
// BLEScan
#include <BLEScan.h>
// BLE Advertised Device
#include <BLEAdvertisedDevice.h>
// BLE Eddystone URL
#include <BLEEddystoneURL.h>
// BLE Eddystone TLM
#include <BLEEddystoneTLM.h>
// BLE Beacon
#include <BLEBeacon.h>
// DS3231 RTC Date and Time
#include <RTClib.h>
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
#include <Adafruit_GFX.h>
// ENDIAN_CHANGE
#define ENDIAN_CHANGE_U16(x) ((((x)&0xFF00) >> 8) + (((x)&0xFF) << 8))
// DS3231 RTC Date and Time
RTC_DS3231 rtc;
String sDate;
String sTime;
// MicroSD Card
const int chipSelect = 13;
String zzzzzz = "";
// SHARP Memory Display
#define SHARP_SCK 12
#define SHARP_MOSI 4
#define SHARP_SS 16
// Set the size of the display here, e.g. 144x168!
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices.
#define BLACK 0
#define WHITE 1
// LED Green
int iLEDGreen = 2;
// Define LED
int iLED = 14;
// Fermion: SHT40 Temperature & Humidity Sensor
// Temperature
float TemperatureData;
float Temperature;
// Humidity
float HumidityData;
float Humidity;
// In seconds
int scanTime = 5;
// BLE Scan
BLEScan *pBLEScan;
// My Advertised Device Callbacks
class MyAdvertisedDeviceCallbacks : public BLEAdvertisedDeviceCallbacks
{
// onResult
void onResult(BLEAdvertisedDevice advertisedDevice)
{
// Advertised Device
if (advertisedDevice.haveName())
{
// Name: Fermion: Sensor Beacon
if(String(advertisedDevice.getName().c_str()) == "SHT40"){
// strManufacturerData
std::string strManufacturerData = advertisedDevice.getManufacturerData();
uint8_t cManufacturerData[100];
strManufacturerData.copy((char *)cManufacturerData, strManufacturerData.length(), 0);
// strManufacturerData.length
for (int i = 0; i < strManufacturerData.length(); i++)
{
// cManufacturerData[i]
cManufacturerData[i];
}
// TemperatureData
TemperatureData = int(cManufacturerData[2]<<8 | cManufacturerData[3]);
// HumidityData
HumidityData = int(cManufacturerData[5]<<8 | cManufacturerData[6]);
}
}
}
};
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Software Version Information
String sver = "29-11";
void loop() {
// DS3231 RTC Date and Time
isRTC();
// ScanResults
isBLEScanResults();
// Fermion: SHT40 Temperature & Humidity Sensor
isSHT40();
// Delay 3 Second
delay(3000);
// Display Date, Time, Temperature, Humidity
isDisplayDTTH();
// MicroSD Card
isSD();
// iLED HIGH
digitalWrite(iLED, HIGH );
// Delay 1 Second
delay(1000);
}
getBLEScan.ino
// getBLEScan
// Setup BLE Scan
void isSetupBLEScan(){
// BLE Device
BLEDevice::init("");
// Create new scan
pBLEScan = BLEDevice::getScan();
// Set Advertised Device Callbacks
pBLEScan->setAdvertisedDeviceCallbacks(new MyAdvertisedDeviceCallbacks());
// Active scan uses more power, but get results faster
pBLEScan->setActiveScan(true);
// Set Interval
pBLEScan->setInterval(100);
// Less or equal setInterval value
pBLEScan->setWindow(99);
}
// BLE Scan Results
void isBLEScanResults(){
// Put your main code here, to run repeatedly:
BLEScanResults foundDevices = pBLEScan->start(scanTime, false);
// Delete results fromBLEScan buffer to release memory
pBLEScan->clearResults();
}
getDisplay.ino
// SHARP Memory Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
//display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
//display.setTextSize(2);
display.setCursor(0,95);
display.println( sver );
// EEPROM
display.setCursor(0,120);
display.println( "EEPROM" );
display.setCursor(0,140);
display.println( uid );
// Refresh
display.refresh();
delay( 100 );
}
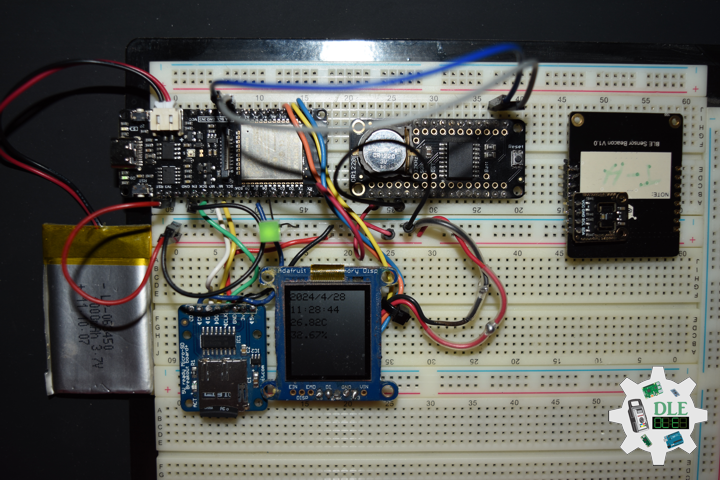
// Display Date, Time, Temperature, Humidity
void isDisplayDTTH() {
// Text Display Date
// Clear Display
display.clearDisplay();
display.setRotation(4);
display.setTextSize(2);
display.setTextColor(BLACK);
// Date
display.setCursor(0,5);
display.println( sDate );
// Time
display.setCursor(0,30);
display.println( sTime );
// Temperature
display.setCursor(0,55);
display.print( Temperature );
display.println( "C" );
// Humidity
display.setCursor(0,80);
display.print( Humidity );
display.println( "%" );
// Refresh
display.refresh();
delay( 100 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getRTC.ino
// DS3231 RTC Date and Time
// Setup DS3231 RTC
void isSetupRTC() {
if (! rtc.begin()) {
while (1);
}
if (rtc.lostPower()) {
// Following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// rtc.adjust(DateTime(2014, 1, 21, 3, 0, 0));
}
}
// DS3231 RTC Date and Time
void isRTC(){
// Date and Time
sDate = "";
sTime = "";
// Date Time
DateTime now = rtc.now();
// sData
sDate += String(now.year(), DEC);
sDate += "/";
sDate += String(now.month(), DEC);
sDate += "/";
sDate += String(now.day(), DEC);
// sTime
sTime += String(now.hour(), DEC);
sTime += ":";
sTime += String(now.minute(), DEC);
sTime += ":";
sTime += String(now.second(), DEC);
}
getSD.ino
// MicroSD Card
// MicroSD Setup
void setupSD() {
// MicroSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
// CARD NONE
if(cardType == CARD_NONE){
;
return;
}
// SD Card Type
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
// Size
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// MicroSD Card
void isSD() {
zzzzzz = "";
// DFR|EEPROM Unique ID|Version|Date|Time|Temperature|Humidity|*\r
zzzzzz = "DFR|" + uid + "|" + sver + "|" + sDate + "|" + sTime + "|"
+ String(Temperature) + "C|" + String(Humidity) + "%|*\r";
// msg + 1
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
// Append File
appendFile(SD, "/dfrdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
// List Dir
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
// Write File
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
// Append File
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
getSHT40.ino
// Fermion: SHT40 Temperature & Humidity Sensor
// SHT40 Temperature & Humidity
void isSHT40(){
// Fermion: SHT40 Temperature & Humidity Sensor
// Temperature
Temperature = (175 * TemperatureData/65535) - 45;
// Humidity
Humidity = (125 * HumidityData/65535) - 6;
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// Give display
delay(100);
// Set up I2C bus
Wire.begin();
// Give display
delay(100);
// Setup BLE Scan
isSetupBLEScan();
// Setup DS3231 RTC
isSetupRTC();
//MicroSD Card
setupSD();
// SHARP Display Start & Clear the Display
display.begin();
// Clear Display
display.clearDisplay();
// Initialize digital pin iLED as an output
pinMode(iLED, OUTPUT);
// Outputting high, the LED turns on
digitalWrite(iLED, HIGH);
// Initialize the LED Green
pinMode(iLEDGreen, OUTPUT);
// iLEDGreen HIGH
digitalWrite(iLEDGreen, HIGH );
// Don Luc Electronics
// Version
// EEPROM
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc