Accelerometer
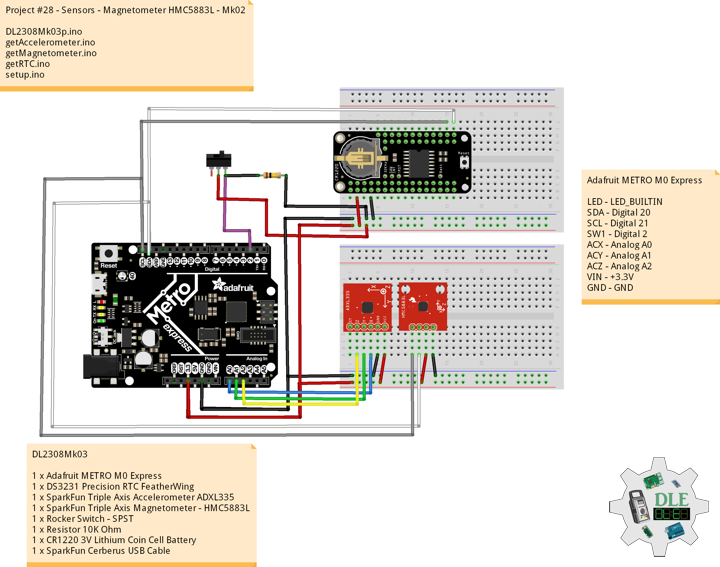
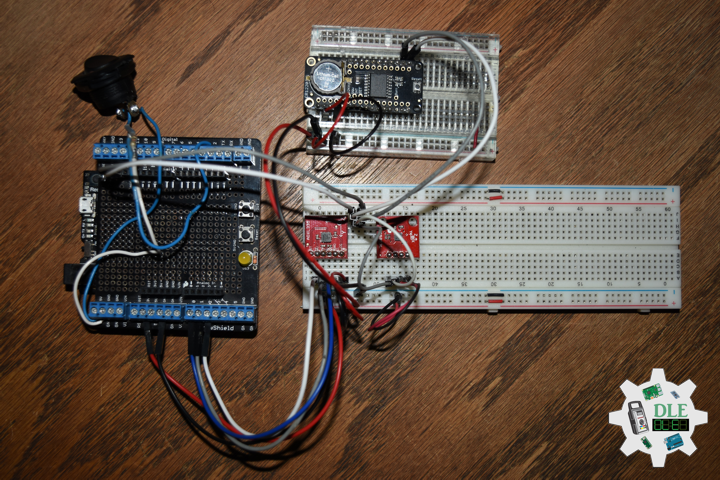
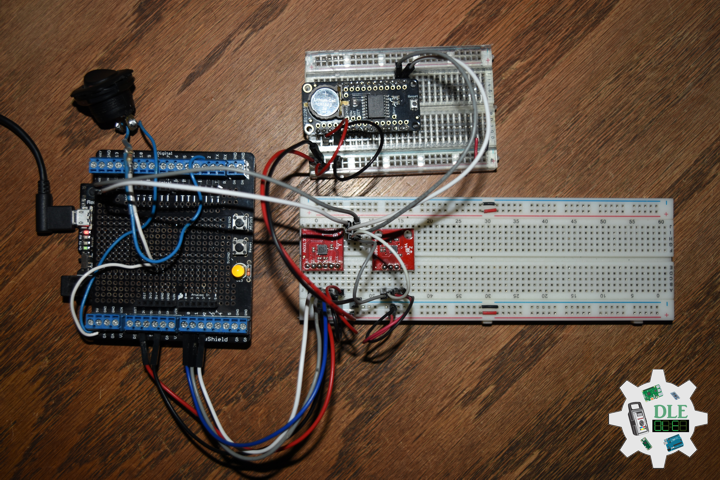
Project #28 – Sensors – Magnetometer HMC5883L – Mk02
——
#DonLucElectronics #DonLuc #Sensors #HMC5883L #ADXL335 #Adafruit #SparkFun #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
SparkFun Triple Axis Magnetometer – HMC5883L
This is a breakout board for Honeywell’s HMC5883L, a 3-axis digital compass. Communication with the HMC5883L is simple and all done through an I2C interface. There is no on-board regulator, so a regulated voltage of 2.16-3.6VDC should be supplied. The Honeywell HMC5883L is a surface-mount, multi-chip module designed for low-field magnetic sensing with a digital interface for applications such as low-cost compassing and magnetometry. Applications for the HMC5883L include Mobile Phones, Netbooks, Consumer Electronics, Auto Navigation Systems, and Personal Navigation Devices.
DL2308Mk03
1 x Adafruit METRO M0 Express
1 x DS3231 Precision RTC FeatherWing
1 x SparkFun Triple Axis Accelerometer ADXL335
1 x SparkFun Triple Axis Magnetometer – HMC5883L
1 x Rocker Switch – SPST
1 x Resistor 10K Ohm
1 x CR1220 3V Lithium Coin Cell Battery
1 x SparkFun Cerberus USB Cable
Adafruit METRO M0 Express
LED – LED_BUILTIN
SDA – Digital 20
SCL – Digital 21
SW1 – Digital 2
ACX – Analog A0
ACY – Analog A1
ACZ – Analog A2
VIN – +3.3V
GND – GND
——
DL2308Mk03p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #28 - Sensors - Magnetometer HMC5883L - Mk02
28-02
DL2308Mk03p.ino
1 x Adafruit METRO M0 Express
1 x DS3231 Precision RTC FeatherWing
1 x SparkFun Triple Axis Accelerometer ADXL335
1 x Rocker Switch - SPST
1 x Resistor 10K Ohm
1 x CR1220 3V Lithium Coin Cell Battery
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// DS3231 Precision RTC
#include <RTClib.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// Keyboard
#include <Keyboard.h>
// Triple Axis Magnetometer
#include <HMC5883L.h>
// Keyboard
String sKeyboard = "";
// DS3231 Precision RTC
RTC_DS3231 rtc;
String dateRTC = "";
String timeRTC = "";
// Accelerometer
int iX = A0;
int iY = A1;
int iZ = A2;
// Accelerometer
int X = 0;
int Y = 0;
int Z = 0;
// Triple Axis Magnetometer
HMC5883L compass;
// Triple Axis Magnetometer
int mX = 0;
int mY = 0;
int mZ = 0;
// The number of the pushbutton pin
int iButton = 2;
// Variable for reading the pushbutton status
int buttonState = 0;
// Software Version Information
String sver = "28-02";
void loop() {
// Date and Time RTC
isRTC ();
// Accelerometer
isAccelerometer();
// Magnetometer
isMagnetometer();
// Read the state of the button value:
buttonState = digitalRead(iButton);
// Check if the button is pressed. If it is, the buttonState is HIGH:
if (buttonState == HIGH) {
Keyboard.println(sKeyboard);
}
// Delay 1 sec
delay(1000);
}
getAccelerometer.ino
// Accelerometer
// Accelerometer
void isAccelerometer(){
// Accelerometer X, Y, Z
// X
X = analogRead(iX);
// Y
Y = analogRead(iY);
// Z
Z = analogRead(iZ);
sKeyboard = sKeyboard + String(X) + "|" + String(Y) + "|" + String(Z) + "|";
}
getMagnetometer.ino
// Magnetometer
// Setup Magnetometer
void isSetupMagnetometer(){
// Magnetometer Serial
// Initialize HMC5883L
while (!compass.begin())
{
delay(500);
}
// Set measurement range
// +/- 1.30 Ga: HMC5883L_RANGE_1_3GA (default)
compass.setRange(HMC5883L_RANGE_1_3GA);
// Set measurement mode
// Continuous-Measurement: HMC5883L_CONTINOUS (default)
compass.setMeasurementMode(HMC5883L_CONTINOUS);
// Set data rate
// 15.00Hz: HMC5883L_DATARATE_15HZ (default)
compass.setDataRate(HMC5883L_DATARATE_15HZ);
// Set number of samples averaged
// 1 sample: HMC5883L_SAMPLES_1 (default)
compass.setSamples(HMC5883L_SAMPLES_1);
}
// Magnetometer
void isMagnetometer(){
// Vector Norm
Vector norm = compass.readNormalize();
// Vector X, Y, Z
// X Normalize
mX = norm.XAxis;
// Y Normalize
mY = norm.YAxis;
// Z Normalize
mZ = norm.ZAxis;
sKeyboard = sKeyboard + String(mX) + "|" + String(mY) + "|" + String(mZ) + "|*";
}
getRTC.ino
// Date & Time
// DS3231 Precision RTC
void setupRTC() {
// DS3231 Precision RTC
if (! rtc.begin()) {
//Serial.println("Couldn't find RTC");
//Serial.flush();
while (1) delay(10);
}
if (rtc.lostPower()) {
//Serial.println("RTC lost power, let's set the time!");
// When time needs to be set on a new device, or after a power loss, the
// following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
//rtc.adjust(DateTime(2023, 8, 10, 11, 0, 0));
}
}
// Date and Time RTC
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.day(), DEC;
Serial.print("Date: ");
Serial.println(dateRTC);
// Time
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.second(), DEC;
Serial.print("Time: ");
Serial.println(timeRTC);
sKeyboard = "SEN|" + sver + "|" + String(dateRTC) + "|" +
String(timeRTC) + "|";
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// Wire - Inialize I2C Hardware
Wire.begin();
// Give display time to power on
delay(100);
// Date & Time RTC
// DS3231 Precision RTC
setupRTC();
// Initialize control over the keyboard:
Keyboard.begin();
// Setup Triple Axis Magnetometer
isSetupMagnetometer();
// Initialize the button pin as an input
pinMode(iButton, INPUT);
// Initialize digital pin LED_BUILTIN as an output
pinMode(LED_BUILTIN, OUTPUT);
// Turn the LED on HIGH
digitalWrite(LED_BUILTIN, HIGH);
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
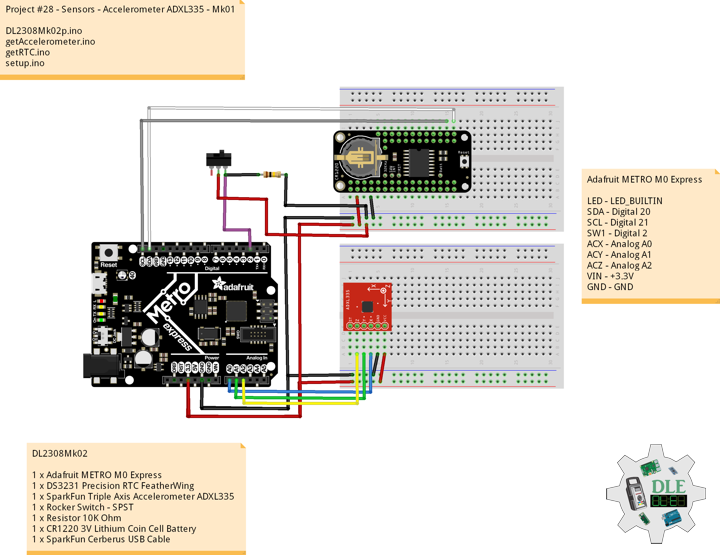
Project #28 – Sensors – Accelerometer ADXL335 – Mk01
——
#DonLucElectronics #DonLuc #Sensors #ADXL335 #Adafruit #SparkFun #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Sensor
A sensor is a device that produces an output signal for the purpose of sensing a physical phenomenon. In the broadest definition, a sensor is a device, module, machine, or subsystem that detects events or changes in its environment and sends the information to other electronics, frequently a computer processor.
- Acoustic, sound, vibration
- Automotive
- Chemical
- Electric current, electric potential, magnetic, radio
- Environment, weather, moisture, humidity
- Flow, fluid velocity
- Ionizing radiation, subatomic particles
- Navigation instruments
- Position, angle, displacement, distance, speed, acceleration
- Optical, light, imaging, photon
- Pressure
- Force, density, level
- Thermal, heat, temperature
- Proximity, presence
- Sensor technology
- Speed sensor
- Others
- Etc…
SparkFun Triple Axis Accelerometer Breakout – ADXL335
Breakout board for the 3 axis ADXL335 from Analog Devices. This is the latest in a long, proven line of analog sensors, the holy grail of accelerometers. The ADXL335 is a triple axis MEMS accelerometer with extremely low noise and power consumption.
DL2308Mk02
1 x Adafruit METRO M0 Express
1 x DS3231 Precision RTC FeatherWing
1 x SparkFun Triple Axis Accelerometer ADXL335
1 x Rocker Switch – SPST
1 x Resistor 10K Ohm
1 x CR1220 3V Lithium Coin Cell Battery
1 x SparkFun Cerberus USB Cable
Adafruit METRO M0 Express
LED – LED_BUILTIN
SDA – Digital 20
SCL – Digital 21
SW1 – Digital 2
ACX – Analog A0
ACY – Analog A1
ACZ – Analog A2
VIN – +3.3V
GND – GND
——
DL2308Mk02p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #28 - Sensors - Accelerometer ADXL335 - Mk01
28-01
DL2308Mk02p.ino
1 x Adafruit METRO M0 Express
1 x DS3231 Precision RTC FeatherWing
1 x SparkFun Triple Axis Accelerometer ADXL335
1 x Rocker Switch - SPST
1 x Resistor 10K Ohm
1 x CR1220 3V Lithium Coin Cell Battery
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// DS3231 Precision RTC
#include <RTClib.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// Keyboard
#include <Keyboard.h>
// Keyboard
String sKeyboard = "";
// DS3231 Precision RTC
RTC_DS3231 rtc;
String dateRTC = "";
String timeRTC = "";
// Accelerometer
int iX = A0;
int iY = A1;
int iZ = A2;
// Accelerometer
int X = 0;
int Y = 0;
int Z = 0;
// The number of the pushbutton pin
int iButton = 2;
// Variable for reading the pushbutton status
int buttonState = 0;
// Software Version Information
String sver = "28-01";
void loop() {
// Date and Time RTC
isRTC ();
// Accelerometer
isAccelerometer();
// Read the state of the pushbutton value:
buttonState = digitalRead(iButton);
// Check if the pushbutton is pressed. If it is, the buttonState is HIGH:
if (buttonState == HIGH) {
Keyboard.println(sKeyboard);
}
// Delay 1 sec
delay(1000);
}
getAccelerometer.ino
// Accelerometer
// Accelerometer
void isAccelerometer(){
// Accelerometer X, Y, Z
// X
X = analogRead(iX);
Serial.print("X: ");
Serial.println(X);
// Y
Y = analogRead(iY);
Serial.print("Y: ");
Serial.println(Y);
// Z
Z = analogRead(iZ);
Serial.print("Z: ");
Serial.println(Z);
sKeyboard = sKeyboard + String(X) + "|" + String(Y) + "|" + String(Z) + "|*";
}
getRTC.ino
// Date & Time
// DS3231 Precision RTC
void setupRTC() {
// DS3231 Precision RTC
if (! rtc.begin()) {
Serial.println("Couldn't find RTC");
Serial.flush();
while (1) delay(10);
}
if (rtc.lostPower()) {
Serial.println("RTC lost power, let's set the time!");
// When time needs to be set on a new device, or after a power loss, the
// following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
//rtc.adjust(DateTime(2023, 8, 10, 11, 0, 0));
}
}
// Date and Time RTC
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.day(), DEC;
Serial.print("Date: ");
Serial.println(dateRTC);
// Time
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.second(), DEC;
Serial.print("Time: ");
Serial.println(timeRTC);
sKeyboard = "SEN|" + sver + "|" + String(dateRTC) + "|" +
String(timeRTC) + "|";
}
setup.ino
// Setup
void setup()
{
// Serial Begin
Serial.begin(115200);
Serial.println("Starting Serial work!");
// Give display time to power on
delay(100);
// Wire - Inialize I2C Hardware
Wire.begin();
// Give display time to power on
delay(100);
// Date & Time RTC
// DS3231 Precision RTC
setupRTC();
// Initialize control over the keyboard:
Keyboard.begin();
// Initialize the pushbutton pin as an input
pinMode(iButton, INPUT);
// Initialize digital pin LED_BUILTIN as an output
pinMode(LED_BUILTIN, OUTPUT);
// Turn the LED on HIGH
digitalWrite(LED_BUILTIN, HIGH);
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
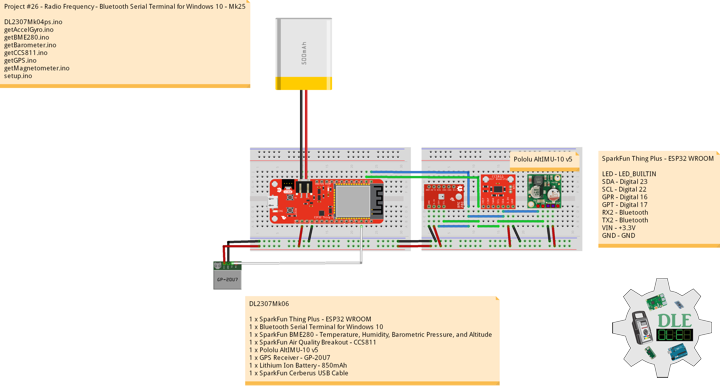
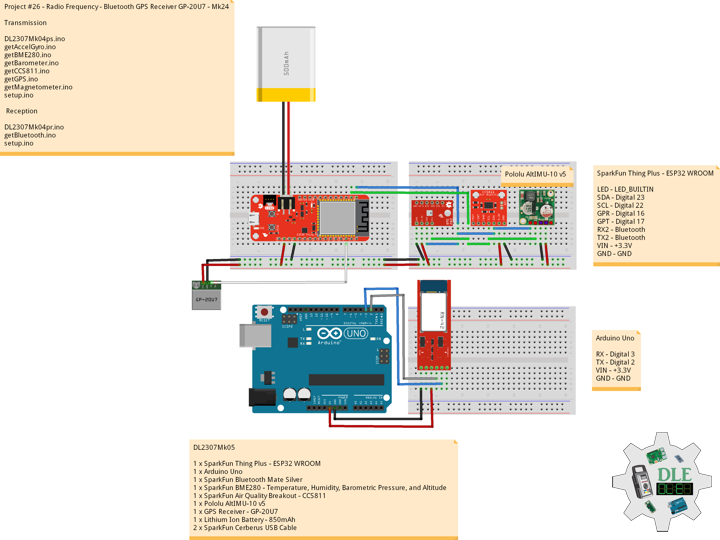
Project #26 – Radio Frequency – Bluetooth Serial Terminal for Windows 10 – Mk25
——
#DonLucElectronics #DonLuc #RadioFrequency #Bluetooth #GPS #SparkFun #BME280 #CCS811 #IMU #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Bluetooth Serial Terminal for Windows 10
You can use this App to communicate with Serial Bluetooth devices like the RN-42, ESP32, that are used for arduino projects and other custom projects. Make sure to pair the device first in PC Settings.
- Use the rfcomm protocol to communicate with serial bluetooth devices.
- You can send and recieve data in either hex or string format.
- UI more responsive while updating terminal.
- Bytes that do not have proper ascii mapping are converted to space characters.
- Transmit data is displayed on terminal if it is successfully sent.
- Communicate with Serial Bluetooth devices.
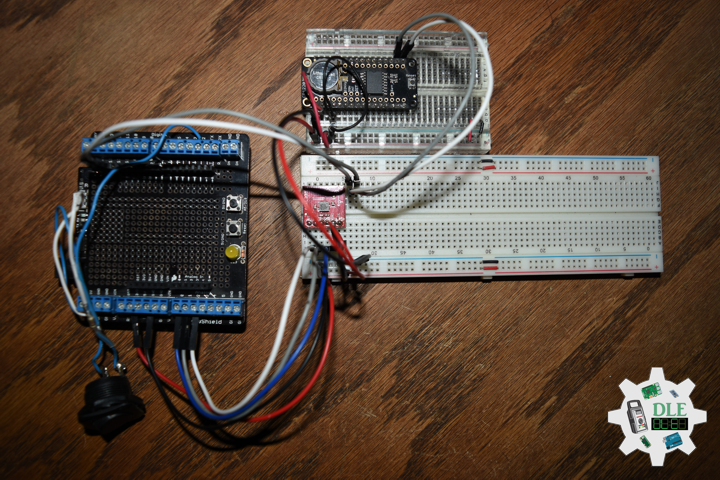
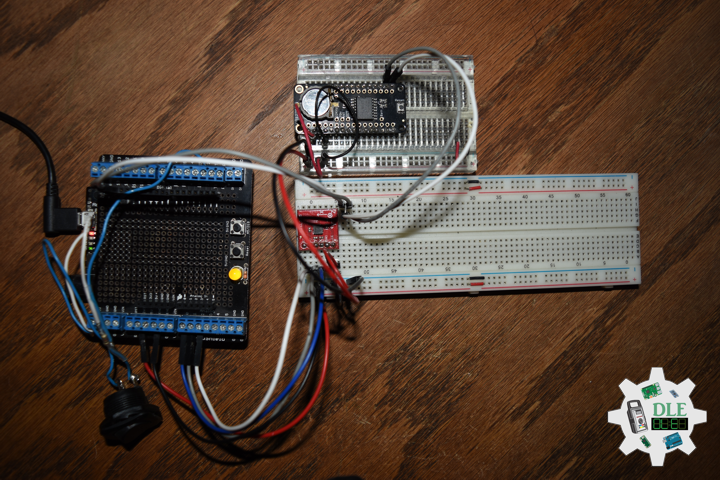
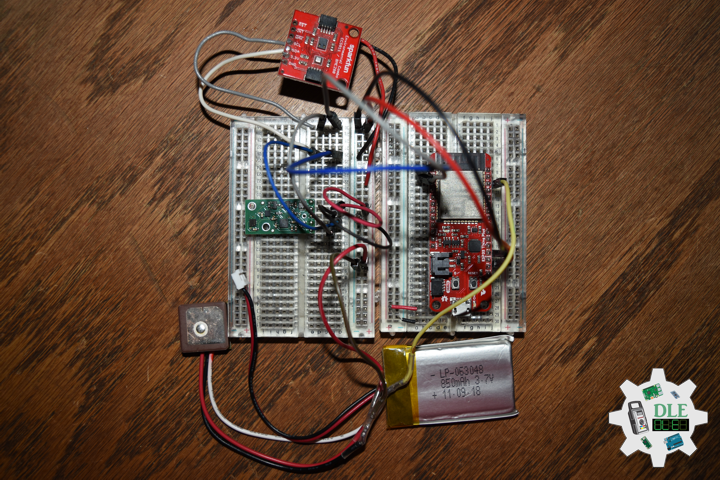
DL2307Mk06
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Bluetooth Serial Terminal for Windows 10
1 x SparkFun BME280 – Temperature, Humidity, Barometric Pressure, and Altitude
1 x SparkFun Air Quality Breakout – CCS811
1 x Pololu AltIMU-10 v5
1 x GPS Receiver – GP-20U7
1 x Lithium Ion Battery – 850mAh
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
LED – LED_BUILTIN
SDA – Digital 23
SCL – Digital 22
GPR – Digital 16
GPT – Digital 17
RX2 – Bluetooth
TX2 – Bluetooth
VIN – +3.3V
GND – GND
——
DL2307Mk06ps.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Bluetooth Serial Terminal for Windows 10 - Mk25
26-25
DL2307Mk06p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x Bluetooth Serial Terminal for Windows 10
1 x SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
1 x SparkFun Air Quality Breakout - CCS811
1 x Pololu AltIMU-10 v5
1 x GPS Receiver - GP-20U7
1 x Lithium Ion Battery - 85mAh
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Bluetooth Serial
#include "BluetoothSerial.h"
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to and enable it
#endif
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
#include <SparkFunBME280.h>
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// Includes and variables for IMU integration
// STMicroelectronics LSM6DS33 gyroscope and accelerometer
#include <LSM6.h>
// STMicroelectronics LIS3MDL magnetometer
#include <LIS3MDL.h>
// STMicroelectronics LPS25H digital barometer
#include <LPS.h>
// GPS Receiver
#include <TinyGPS++.h>
// ESP32 Hardware Serial
#include <HardwareSerial.h>
// Bluetooth Serial
BluetoothSerial SerialBT;
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
BME280 myBME280;
float BMEtempC = 0;
float BMEhumid = 0;
float BMEpressure = 0;
float BMEaltitudeM = 0;
String FullString = "";
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
float CCS811CO2 = 0;
float CCS811TVOC = 0;
String FullStringA = "";
// 9DoF IMU
// STMicroelectronics LSM6DS33 gyroscope and accelerometer
LSM6 imu;
// Accelerometer and Gyroscopes
// Accelerometer
int imuAX;
int imuAY;
int imuAZ;
String FullStringB = "";
// Gyroscopes
int imuGX;
int imuGY;
int imuGZ;
String FullStringC = "";
// STMicroelectronics LIS3MDL magnetometer
LIS3MDL mag;
// Magnetometer
int magX;
int magY;
int magZ;
String FullStringD = "";
// STMicroelectronics LPS25H digital barometer
LPS ps;
// Digital Barometer
float pressure;
float altitude;
float temperature;
String FullStringF = "";
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// GPS Receiver
#define gpsRXPIN 16
// This one is unused and doesnt have a conection
#define gpsTXPIN 17
// The TinyGPS++ object
TinyGPSPlus gps;
// Latitude
float TargetLat;
// Longitude
float TargetLon;
String FullStringG = "";
// GPS Date, Time, Speed, Altitude
// GPS Date
String TargetDat;
// GPS Time
String TargetTim;
// GPS Speeds M/S
String TargetSMS;
// GPS Speeds Km/h
String TargetSKH;
// GPS Altitude Meters
String TargetALT;
// GPS Status
String GPSSt = "";
String FullStringH = "";
// Software Version Information
String sver = "26-25";
void loop() {
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Accelerometer and Gyroscopes
isIMU();
// Magnetometer
isMag();
// Barometer
isBarometer();
// isGPS
isGPS();
// Delay 1 sec
delay(1000);
}
getAccelGyro.ino
// Accelerometer and Gyroscopes
// Setup IMU
void setupIMU() {
// Setup IMU
imu.init();
// Default
imu.enableDefault();
}
// Accelerometer and Gyroscopes
void isIMU() {
// Accelerometer and Gyroscopes
imu.read();
// Accelerometer x, y, z
imuAX = imu.a.x;
imuAY = imu.a.y;
imuAZ = imu.a.z;
// Gyroscopes x, y, z
imuGX = imu.g.x;
imuGY = imu.g.y;
imuGZ = imu.g.z;
// FullString B
FullStringB = "Accelerometer X = " + String(imuAX) + " Accelerometer Y = "
+ String(imuAY) + " Accelerometer Z = " + String(imuAZ)
+ "\r\n";
// FullStringB Bluetooth Serial + Serial
for(int i = 0; i < FullStringB.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringB.c_str()[i]);
// Serial
Serial.write(FullStringB.c_str()[i]);
}
// FullString C
FullStringC = "Gyroscopes X = " + String(imuGX) + " Gyroscopes Y = "
+ String(imuGY) + " Gyroscopes Z = " + String(imuGZ)
+ "\r\n";
// FullStringC Bluetooth Serial + Serial
for(int i = 0; i < FullStringC.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringC.c_str()[i]);
// Serial
Serial.write(FullStringC.c_str()[i]);
}
}
getBME280.ino
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
// isBME280 - Temperature, Humidity, Barometric Pressure, and Altitude
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// FullString
FullString = "Temperature = " + String(BMEtempC,2) + " Humidity = "
+ String(BMEhumid,2) + " Barometric = " + String(BMEpressure,2)
+ " Altitude Meters = " + String(BMEaltitudeM,2) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getBarometer.ino
// STMicroelectronics LPS25H digital barometer
// Setup Barometer
void isSetupBarometer(){
// Setup Barometer
ps.init();
// Default
ps.enableDefault();
}
// Barometer
void isBarometer(){
// Barometer
pressure = ps.readPressureMillibars();
// Altitude Meters
altitude = ps.pressureToAltitudeMeters(pressure);
// Temperature Celsius
temperature = ps.readTemperatureC();
// FullStringF
FullStringF = "Barometer = " + String(pressure,2) + " Altitude Meters = "
+ String(altitude,2) + " Temperature Celsius = "
+ String(temperature,2) + "\r\n";
// FullStringF Bluetooth Serial + Serial
for(int i = 0; i < FullStringF.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringF.c_str()[i]);
// Serial
Serial.write(FullStringF.c_str()[i]);
}
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
// FullStringA
FullStringA = "TVOCs = " + String(CCS811TVOC,2) + " eCO2 = "
+ String(CCS811CO2,2) + "\r\n";
// FullStringA Bluetooth Serial + Serial
for(int i = 0; i < FullStringA.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringA.c_str()[i]);
// Serial
Serial.write(FullStringA.c_str()[i]);
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void setupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1 , gpsRXPIN , gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
// GPS Date, Time, Speed, Altitude
displayDTS();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
// FullStringG
FullStringG = "Latitude = " + String(TargetLat) + " Longitude = "
+ String(TargetLon) + "\r\n";
// FullStringG Bluetooth Serial + Serial
for(int i = 0; i < FullStringG.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringG.c_str()[i]);
// Serial
Serial.write(FullStringG.c_str()[i]);
}
}
else
{
// GPS Status 0
GPSSt = "No";
}
}
// GPS Date, Time, Speed, Altitude
void displayDTS(){
// Date
TargetDat = "";
if (gps.date.isValid())
{
// Date
// Year
TargetDat += String(gps.date.year(), DEC);
TargetDat += "/";
// Month
TargetDat += String(gps.date.month(), DEC);
TargetDat += "/";
// Day
TargetDat += String(gps.date.day(), DEC);
// FullStringH
FullStringH = "Date = " + String(TargetDat) + "\r\n";
// FullStringH Bluetooth Serial + Serial
for(int i = 0; i < FullStringH.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringH.c_str()[i]);
// Serial
Serial.write(FullStringH.c_str()[i]);
}
}
// Time
TargetTim = "";
if (gps.time.isValid())
{
// Time
// Hour
TargetTim += String(gps.time.hour(), DEC);
TargetTim += ":";
// Minute
TargetTim += String(gps.time.minute(), DEC);
TargetTim += ":";
// Secound
TargetTim += String(gps.time.second(), DEC);
// FullStringH
FullStringH = "Time = " + String(TargetTim) + "\r\n";
// FullStringH Bluetooth Serial + Serial
for(int i = 0; i < FullStringH.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringH.c_str()[i]);
// Serial
Serial.write(FullStringH.c_str()[i]);
}
}
// Speed
TargetSMS = "";
TargetSKH = "";
if (gps.speed.isValid())
{
// Speed
// M/S
int x = gps.speed.mps();
TargetSMS = String( x, DEC);
// Km/h
int y = gps.speed.kmph();
TargetSKH = String( y, DEC);
// FullStringH
FullStringH = "Speed = " + String(TargetSMS) + "\r\n";
// FullStringH Bluetooth Serial + Serial
for(int i = 0; i < FullStringH.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringH.c_str()[i]);
// Serial
Serial.write(FullStringH.c_str()[i]);
}
}
// Altitude
TargetALT = "";
if (gps.altitude.isValid())
{
// Altitude
// Meters
int z = gps.altitude.meters();
TargetALT = String( z, DEC);
// FullStringH
FullStringH = "Altitude = " + String(TargetALT) + "\r\n";
// FullStringH Bluetooth Serial + Serial
for(int i = 0; i < FullStringH.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringH.c_str()[i]);
// Serial
Serial.write(FullStringH.c_str()[i]);
}
}
}
getMagnetometer.ino
// Magnetometer
// Setup Magnetometer
void setupMag() {
// Setup Magnetometer
mag.init();
// Default
mag.enableDefault();
}
// Magnetometer
void isMag() {
// Magnetometer
mag.read();
// Magnetometer x, y, z
magX = mag.m.x;
magY = mag.m.y;
magZ = mag.m.z;
// FullString D
FullStringD = "Magnetometer X = " + String(magX) + " Magnetometer Y = "
+ String(magY) + " Magnetometer Z = " + String(magZ)
+ "\r\n";
// FullStringD Bluetooth Serial + Serial
for(int i = 0; i < FullStringD.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringD.c_str()[i]);
// Serial
Serial.write(FullStringD.c_str()[i]);
}
}
setup.ino
// Setup
void setup()
{
// Serial Begin
Serial.begin(115200);
Serial.println("Starting BLE work!");
// Bluetooth Serial
SerialBT.begin("Don Luc Electronics");
Serial.println("Bluetooth Started! Ready to pair...");
// Give display time to power on
delay(100);
// Wire - Inialize I2C Hardware
Wire.begin();
// Give display time to power on
delay(100);
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// Setup IMU
setupIMU();
// Setup Magnetometer
setupMag();
// Setup Barometer
isSetupBarometer();
// GPS Receiver
// Setup GPS
setupGPS();
// Initialize digital pin LED_BUILTIN as an output
pinMode(LED_BUILTIN, OUTPUT);
// Turn the LED on HIGH
digitalWrite(LED_BUILTIN, HIGH);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
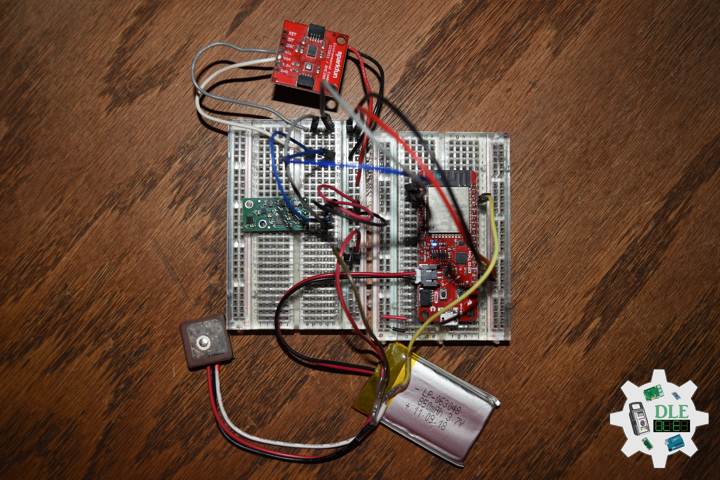
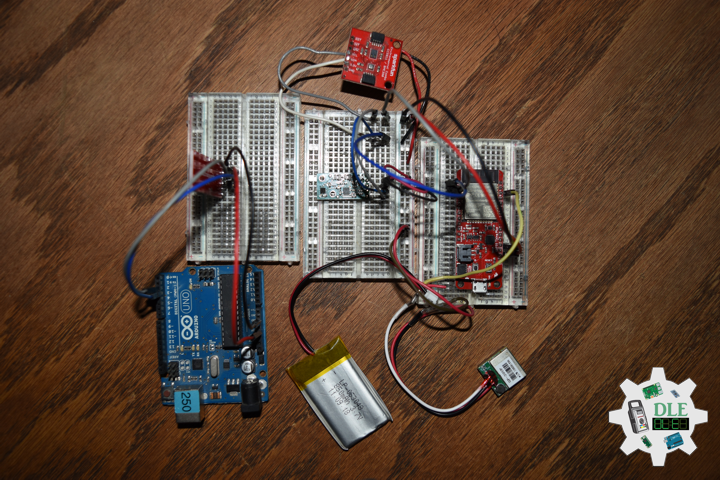
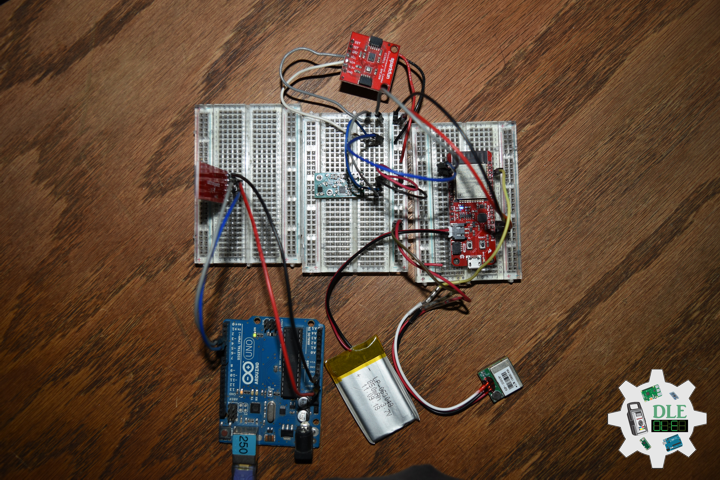
Project #26 – Radio Frequency – Bluetooth GPS Receiver GP-20U7 – Mk24
——
#DonLucElectronics #DonLuc #RadioFrequency #Bluetooth #GPS #SparkFun #BME280 #CCS811 #IMU #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
GPS Receiver – GP-20U7 (56 Channel)
The GP-20U7 is a compact GPS receiver with a built-in high performances all-in-one GPS chipset. The GP-20U7 accurately provides position, velocity, and time readings as well possessing high sensitivity and tracking capabilities. Thanks to the low power consumption this receiver requires, the GP-20U7 is ideal for portable applications such as tablet PCs, smart phones, and other devices requiring positioning capability. With 56 channels in search mode and 22 channels “All-In-View” tracking, the GP-20U7 is quite the work horse for its size.
DL2307Mk05
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Arduino Uno
1 x SparkFun Bluetooth Mate Silver
1 x SparkFun BME280 – Temperature, Humidity, Barometric Pressure, and Altitude
1 x SparkFun Air Quality Breakout – CCS811
1 x Pololu AltIMU-10 v5
1 x GPS Receiver – GP-20U7
1 x Lithium Ion Battery – 850mAh
2 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
LED – LED_BUILTIN
SDA – Digital 23
SCL – Digital 22
GPR – Digital 16
GPT – Digital 17
RX2 – Bluetooth
TX2 – Bluetooth
VIN – +3.3V
GND – GND
——
DL2307Mk05ps.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Bluetooth GPS Receiver GP-20U7 - Mk24
26-24
DL2307Mk05pr.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x Arduino Uno
1 x SparkFun Bluetooth Mate Silver
1 x SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
1 x SparkFun Air Quality Breakout - CCS811
1 x Pololu AltIMU-10 v5
1 x GPS Receiver - GP-20U7
1 x Lithium Ion Battery - 85mAh
2 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Bluetooth Serial
#include "BluetoothSerial.h"
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to and enable it
#endif
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
#include <SparkFunBME280.h>
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// Includes and variables for IMU integration
// STMicroelectronics LSM6DS33 gyroscope and accelerometer
#include <LSM6.h>
// STMicroelectronics LIS3MDL magnetometer
#include <LIS3MDL.h>
// STMicroelectronics LPS25H digital barometer
#include <LPS.h>
// GPS Receiver
#include <TinyGPS++.h>
// ESP32 Hardware Serial
#include <HardwareSerial.h>
// Bluetooth Serial
BluetoothSerial SerialBT;
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
BME280 myBME280;
float BMEtempC = 0;
float BMEhumid = 0;
float BMEpressure = 0;
float BMEaltitudeM = 0;
String FullString = "";
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
float CCS811CO2 = 0;
float CCS811TVOC = 0;
String FullStringA = "";
// 9DoF IMU
// STMicroelectronics LSM6DS33 gyroscope and accelerometer
LSM6 imu;
// Accelerometer and Gyroscopes
// Accelerometer
int imuAX;
int imuAY;
int imuAZ;
String FullStringB = "";
// Gyroscopes
int imuGX;
int imuGY;
int imuGZ;
String FullStringC = "";
// STMicroelectronics LIS3MDL magnetometer
LIS3MDL mag;
// Magnetometer
int magX;
int magY;
int magZ;
String FullStringD = "";
// STMicroelectronics LPS25H digital barometer
LPS ps;
// Digital Barometer
float pressure;
float altitude;
float temperature;
String FullStringF = "";
// ESP32 HardwareSerial
HardwareSerial tGPS(2);
// GPS Receiver
#define gpsRXPIN 16
// This one is unused and doesnt have a conection
#define gpsTXPIN 17
// The TinyGPS++ object
TinyGPSPlus gps;
// Latitude
float TargetLat;
// Longitude
float TargetLon;
String FullStringG = "";
// GPS Date, Time, Speed, Altitude
// GPS Date
String TargetDat;
// GPS Time
String TargetTim;
// GPS Speeds M/S
String TargetSMS;
// GPS Speeds Km/h
String TargetSKH;
// GPS Altitude Meters
String TargetALT;
// GPS Status
String GPSSt = "";
String FullStringH = "";
// Software Version Information
String sver = "26-24";
void loop() {
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Accelerometer and Gyroscopes
isIMU();
// Magnetometer
isMag();
// Barometer
isBarometer();
// isGPS
isGPS();
// Delay 1 sec
delay(1000);
}
getAccelGyro.ino
// Accelerometer and Gyroscopes
// Setup IMU
void setupIMU() {
// Setup IMU
imu.init();
// Default
imu.enableDefault();
}
// Accelerometer and Gyroscopes
void isIMU() {
// Accelerometer and Gyroscopes
imu.read();
// Accelerometer x, y, z
imuAX = imu.a.x;
imuAY = imu.a.y;
imuAZ = imu.a.z;
// Gyroscopes x, y, z
imuGX = imu.g.x;
imuGY = imu.g.y;
imuGZ = imu.g.z;
// FullString B
FullStringB = "Accelerometer X = " + String(imuAX) + " Accelerometer Y = "
+ String(imuAY) + " Accelerometer Z = " + String(imuAZ)
+ "\r\n";
// FullStringB Bluetooth Serial + Serial
for(int i = 0; i < FullStringB.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringB.c_str()[i]);
// Serial
Serial.write(FullStringB.c_str()[i]);
}
// FullString C
FullStringC = "Gyroscopes X = " + String(imuGX) + " Gyroscopes Y = "
+ String(imuGY) + " Gyroscopes Z = " + String(imuGZ)
+ "\r\n";
// FullStringC Bluetooth Serial + Serial
for(int i = 0; i < FullStringC.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringC.c_str()[i]);
// Serial
Serial.write(FullStringC.c_str()[i]);
}
}
getBME280.ino
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
// isBME280 - Temperature, Humidity, Barometric Pressure, and Altitude
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// FullString
FullString = "Temperature = " + String(BMEtempC,2) + " Humidity = "
+ String(BMEhumid,2) + " Barometric = " + String(BMEpressure,2)
+ " Altitude Meters = " + String(BMEaltitudeM,2) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getBarometer.ino
// STMicroelectronics LPS25H digital barometer
// Setup Barometer
void isSetupBarometer(){
// Setup Barometer
ps.init();
// Default
ps.enableDefault();
}
// Barometer
void isBarometer(){
// Barometer
pressure = ps.readPressureMillibars();
// Altitude Meters
altitude = ps.pressureToAltitudeMeters(pressure);
// Temperature Celsius
temperature = ps.readTemperatureC();
// FullStringF
FullStringF = "Barometer = " + String(pressure,2) + " Altitude Meters = "
+ String(altitude,2) + " Temperature Celsius = "
+ String(temperature,2) + "\r\n";
// FullStringF Bluetooth Serial + Serial
for(int i = 0; i < FullStringF.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringF.c_str()[i]);
// Serial
Serial.write(FullStringF.c_str()[i]);
}
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
// FullStringA
FullStringA = "TVOCs = " + String(CCS811TVOC,2) + " eCO2 = "
+ String(CCS811CO2,2) + "\r\n";
// FullStringA Bluetooth Serial + Serial
for(int i = 0; i < FullStringA.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringA.c_str()[i]);
// Serial
Serial.write(FullStringA.c_str()[i]);
}
}
getGPS.ino
// GPS Receiver
// Setup GPS
void setupGPS() {
// Setup GPS
tGPS.begin( 9600 , SERIAL_8N1 , gpsRXPIN , gpsTXPIN );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
// GPS Date, Time, Speed, Altitude
displayDTS();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
// FullStringG
FullStringG = "Latitude = " + String(TargetLat) + " Longitude = "
+ String(TargetLon) + "\r\n";
// FullStringG Bluetooth Serial + Serial
for(int i = 0; i < FullStringG.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringG.c_str()[i]);
// Serial
Serial.write(FullStringG.c_str()[i]);
}
}
else
{
// GPS Status 0
GPSSt = "No";
}
}
// GPS Date, Time, Speed, Altitude
void displayDTS(){
// Date
TargetDat = "";
if (gps.date.isValid())
{
// Date
// Year
TargetDat += String(gps.date.year(), DEC);
TargetDat += "/";
// Month
TargetDat += String(gps.date.month(), DEC);
TargetDat += "/";
// Day
TargetDat += String(gps.date.day(), DEC);
// FullStringH
FullStringH = "Date = " + String(TargetDat) + "\r\n";
// FullStringH Bluetooth Serial + Serial
for(int i = 0; i < FullStringH.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringH.c_str()[i]);
// Serial
Serial.write(FullStringH.c_str()[i]);
}
}
// Time
TargetTim = "";
if (gps.time.isValid())
{
// Time
// Hour
TargetTim += String(gps.time.hour(), DEC);
TargetTim += ":";
// Minute
TargetTim += String(gps.time.minute(), DEC);
TargetTim += ":";
// Secound
TargetTim += String(gps.time.second(), DEC);
// FullStringH
FullStringH = "Time = " + String(TargetTim) + "\r\n";
// FullStringH Bluetooth Serial + Serial
for(int i = 0; i < FullStringH.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringH.c_str()[i]);
// Serial
Serial.write(FullStringH.c_str()[i]);
}
}
// Speed
TargetSMS = "";
TargetSKH = "";
if (gps.speed.isValid())
{
// Speed
// M/S
int x = gps.speed.mps();
TargetSMS = String( x, DEC);
// Km/h
int y = gps.speed.kmph();
TargetSKH = String( y, DEC);
// FullStringH
FullStringH = "Speed = " + String(TargetSMS) + "\r\n";
// FullStringH Bluetooth Serial + Serial
for(int i = 0; i < FullStringH.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringH.c_str()[i]);
// Serial
Serial.write(FullStringH.c_str()[i]);
}
}
// Altitude
TargetALT = "";
if (gps.altitude.isValid())
{
// Altitude
// Meters
int z = gps.altitude.meters();
TargetALT = String( z, DEC);
// FullStringH
FullStringH = "Altitude = " + String(TargetALT) + "\r\n";
// FullStringH Bluetooth Serial + Serial
for(int i = 0; i < FullStringH.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringH.c_str()[i]);
// Serial
Serial.write(FullStringH.c_str()[i]);
}
}
}
getMagnetometer.ino
// Magnetometer
// Setup Magnetometer
void setupMag() {
// Setup Magnetometer
mag.init();
// Default
mag.enableDefault();
}
// Magnetometer
void isMag() {
// Magnetometer
mag.read();
// Magnetometer x, y, z
magX = mag.m.x;
magY = mag.m.y;
magZ = mag.m.z;
// FullString D
FullStringD = "Magnetometer X = " + String(magX) + " Magnetometer Y = "
+ String(magY) + " Magnetometer Z = " + String(magZ)
+ "\r\n";
// FullStringD Bluetooth Serial + Serial
for(int i = 0; i < FullStringD.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringD.c_str()[i]);
// Serial
Serial.write(FullStringD.c_str()[i]);
}
}
setup.ino
// Setup
void setup()
{
// Serial Begin
Serial.begin(9600);
Serial.println("Starting BLE work!");
// Bluetooth Serial
SerialBT.begin("Don Luc Electronics");
Serial.println("Bluetooth Started! Ready to pair...");
// Give display time to power on
delay(100);
// Wire - Inialize I2C Hardware
Wire.begin();
// Give display time to power on
delay(100);
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// Setup IMU
setupIMU();
// Setup Magnetometer
setupMag();
// Setup Barometer
isSetupBarometer();
// GPS Receiver
// Setup GPS
setupGPS();
// Initialize digital pin LED_BUILTIN as an output
pinMode(LED_BUILTIN, OUTPUT);
// Turn the LED on HIGH
digitalWrite(LED_BUILTIN, HIGH);
}
——
Arduino Uno
RX – Digital 3
TX – Digital 2
VIN – +3.3V
GND – GND
——
DL2307Mk05pr.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Bluetooth GPS Receiver GP-20U7 - Mk24
26-24
DL2307Mk05pr.ino
1 x Arduino Uno
1 x SparkFun RedBoard Qwiic
1 x SparkFun Bluetooth Mate Silver
1 x SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
1 x SparkFun Air Quality Breakout - CCS811
1 x Pololu AltIMU-10 v5
1 x GPS Receiver - GP-20U7
1 x Lithium Ion Battery - 85mAh
2 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Software Serial
#include <SoftwareSerial.h>
// Software Serial
// TX-O pin of bluetooth mate, Arduino D2
int bluetoothTx = 2;
// RX-I pin of bluetooth mate, Arduino D3
int bluetoothRx = 3;
// Bluetooth
SoftwareSerial bluetooth(bluetoothTx, bluetoothRx);
// BTA
//String BTA = "0006664FDC9E";
// Software Version Information
String sver = "26-24";
void loop() {
// isBluetooth
isBluetooth();
}
getBluetooth.ino
// Bluetooth
// Setup Bluetooth
void isSetupBluetooth(){
// Setup Bluetooth
// Begin the serial monitor at 9600bps
Serial.begin(9600);
// Bluetooth
// The Bluetooth Mate defaults to 115200bps
bluetooth.begin(115200);
// Print three times individually
bluetooth.print("$");
bluetooth.print("$");
bluetooth.print("$");
// Enter command mode
// Short delay, wait for the Mate to send back CMD
delay(100);
// Temporarily Change the baudrate to 9600, no parity
bluetooth.println("U,9600,N");
// 115200 can be too fast at times for NewSoftSerial to relay the data reliably
// Start bluetooth serial at 9600
bluetooth.begin(9600);
}
// isBluetooth
void isBluetooth() {
// If the bluetooth sent any characters
if(bluetooth.available())
{
// Send any characters the bluetooth prints to the serial monitor
Serial.print((char)bluetooth.read());
}
// If stuff was typed in the serial monitor
if(Serial.available())
{
// Send any characters the Serial monitor prints to the bluetooth
bluetooth.print((char)Serial.read());
}
}
setup.ino
// Setup
void setup()
{
// Setup Bluetooth
isSetupBluetooth();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
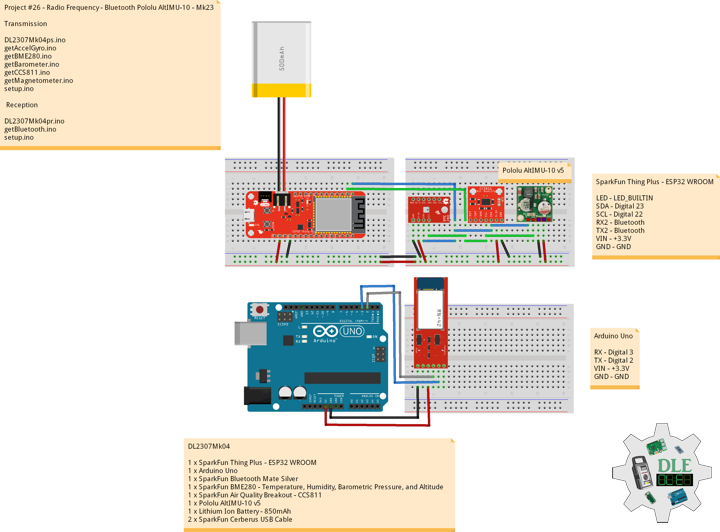
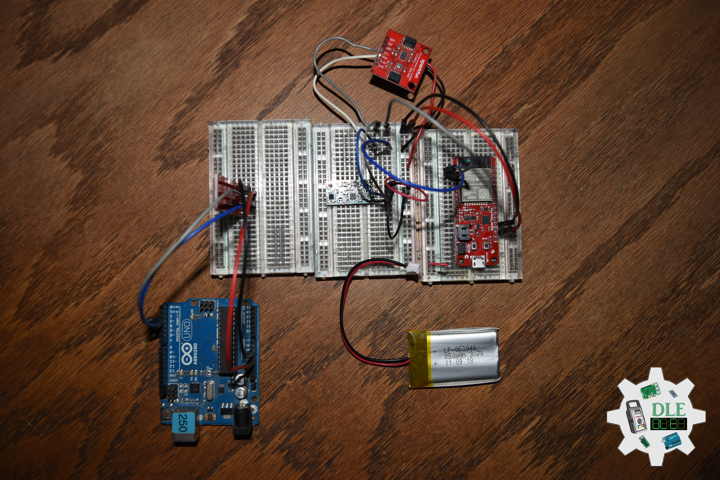
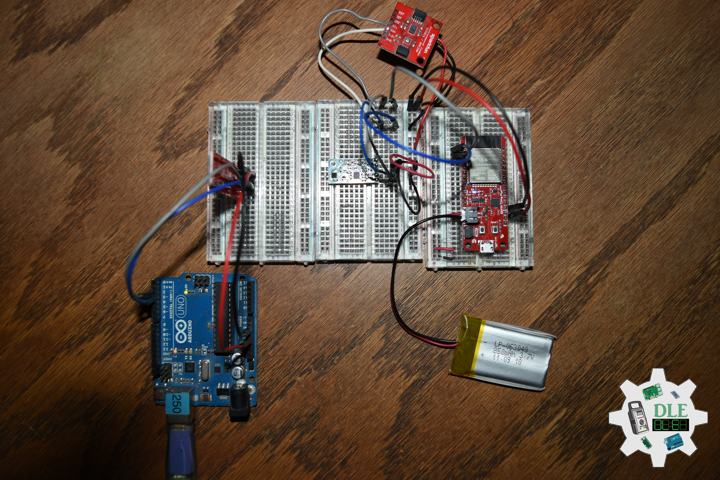
Project #26 – Radio Frequency – Bluetooth Pololu AltIMU-10 – Mk23
——
#DonLucElectronics #DonLuc #RadioFrequency #Bluetooth #SparkFun #BME280 #CCS811 #IMU #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
AltIMU-10 v5 Gyro, Accelerometer, Compass, and Altimeter
The Pololu AltIMU-10 v5 is an inertial measurement unit (IMU) and altimeter that features the same LSM6DS33 gyro and accelerometer and LIS3MDL magnetometer as the MinIMU-9 v5, and adds an LPS25H digital barometer. An I²C interface accesses ten independent pressure, rotation, acceleration, and magnetic measurements that can be used to calculate the sensor’s altitude and absolute orientation. The Pololu AltIMU-10 v5 is a compact board that combines ST’s LSM6DS33 3-axis gyroscope and 3-axis accelerometer, LIS3MDL 3-axis magnetometer, and LPS25H digital barometer to form an inertial measurement unit (IMU) and altimeter.
DL2307Mk04
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Arduino Uno
1 x SparkFun Bluetooth Mate Silver
1 x SparkFun BME280 – Temperature, Humidity, Barometric Pressure, and Altitude
1 x SparkFun Air Quality Breakout – CCS811
1 x Pololu AltIMU-10 v5
1 x Lithium Ion Battery – 850mAh
2 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
LED – LED_BUILTIN
SDA – Digital 23
SCL – Digital 22
RX2 – Bluetooth
TX2 – Bluetooth
VIN – +3.3V
GND – GND
——
DL2307Mk04ps.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Bluetooth Pololu AltIMU-10 - Mk23
26-23
DL2307Mk04pr.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x Arduino Uno
1 x SparkFun Bluetooth Mate Silver
1 x SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
1 x SparkFun Air Quality Breakout - CCS811
1 x Pololu AltIMU-10 v5
1 x Lithium Ion Battery - 85mAh
2 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Bluetooth Serial
#include "BluetoothSerial.h"
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to and enable it
#endif
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
#include <SparkFunBME280.h>
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// Includes and variables for IMU integration
// STMicroelectronics LSM6DS33 gyroscope and accelerometer
#include <LSM6.h>
// STMicroelectronics LIS3MDL magnetometer
#include <LIS3MDL.h>
// STMicroelectronics LPS25H digital barometer
#include <LPS.h>
// Bluetooth Serial
BluetoothSerial SerialBT;
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
BME280 myBME280;
float BMEtempC = 0;
float BMEhumid = 0;
float BMEpressure = 0;
float BMEaltitudeM = 0;
String FullString = "";
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
float CCS811CO2 = 0;
float CCS811TVOC = 0;
String FullStringA = "";
// 9DoF IMU
// STMicroelectronics LSM6DS33 gyroscope and accelerometer
LSM6 imu;
// Accelerometer and Gyroscopes
// Accelerometer
int imuAX;
int imuAY;
int imuAZ;
String FullStringB = "";
// Gyroscopes
int imuGX;
int imuGY;
int imuGZ;
String FullStringC = "";
// STMicroelectronics LIS3MDL magnetometer
LIS3MDL mag;
// Magnetometer
int magX;
int magY;
int magZ;
String FullStringD = "";
// STMicroelectronics LPS25H digital barometer
LPS ps;
// Digital Barometer
float pressure;
float altitude;
float temperature;
String FullStringF = "";
// Software Version Information
String sver = "26-23";
void loop() {
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Accelerometer and Gyroscopes
isIMU();
// Magnetometer
isMag();
// Barometer
isBarometer();
// Delay 1 sec
delay(1000);
}
getAccelGyro.ino
// Accelerometer and Gyroscopes
// Setup IMU
void setupIMU() {
// Setup IMU
imu.init();
// Default
imu.enableDefault();
}
// Accelerometer and Gyroscopes
void isIMU() {
// Accelerometer and Gyroscopes
imu.read();
// Accelerometer x, y, z
imuAX = imu.a.x;
imuAY = imu.a.y;
imuAZ = imu.a.z;
// Gyroscopes x, y, z
imuGX = imu.g.x;
imuGY = imu.g.y;
imuGZ = imu.g.z;
// FullString B
FullStringB = "Accelerometer X = " + String(imuAX) + " Accelerometer Y = "
+ String(imuAY) + " Accelerometer Z = " + String(imuAZ)
+ "\r\n";
// FullStringB Bluetooth Serial + Serial
for(int i = 0; i < FullStringB.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringB.c_str()[i]);
// Serial
Serial.write(FullStringB.c_str()[i]);
}
// FullString C
FullStringC = "Gyroscopes X = " + String(imuGX) + " Gyroscopes Y = "
+ String(imuGY) + " Gyroscopes Z = " + String(imuGZ)
+ "\r\n";
// FullStringC Bluetooth Serial + Serial
for(int i = 0; i < FullStringC.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringC.c_str()[i]);
// Serial
Serial.write(FullStringC.c_str()[i]);
}
}
getBME280.ino
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
// isBME280 - Temperature, Humidity, Barometric Pressure, and Altitude
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// FullString
FullString = "Temperature = " + String(BMEtempC,2) + " Humidity = "
+ String(BMEhumid,2) + " Barometric = " + String(BMEpressure,2)
+ " Altitude Meters = " + String(BMEaltitudeM,2) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getBarometer.ino
// STMicroelectronics LPS25H digital barometer
// Setup Barometer
void isSetupBarometer(){
// Setup Barometer
ps.init();
// Default
ps.enableDefault();
}
// Barometer
void isBarometer(){
// Barometer
pressure = ps.readPressureMillibars();
// Altitude Meters
altitude = ps.pressureToAltitudeMeters(pressure);
// Temperature Celsius
temperature = ps.readTemperatureC();
// FullStringF
FullStringF = "Barometer = " + String(pressure,2) + " Altitude Meters = "
+ String(altitude,2) + " Temperature Celsius = "
+ String(temperature,2) + "\r\n";
// FullStringF Bluetooth Serial + Serial
for(int i = 0; i < FullStringF.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringF.c_str()[i]);
// Serial
Serial.write(FullStringF.c_str()[i]);
}
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
// FullStringA
FullStringA = "TVOCs = " + String(CCS811TVOC,2) + " eCO2 = "
+ String(CCS811CO2,2) + "\r\n";
// FullStringA Bluetooth Serial + Serial
for(int i = 0; i < FullStringA.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringA.c_str()[i]);
// Serial
Serial.write(FullStringA.c_str()[i]);
}
}
getMagnetometer.ino
// Magnetometer
// Setup Magnetometer
void setupMag() {
// Setup Magnetometer
mag.init();
// Default
mag.enableDefault();
}
// Magnetometer
void isMag() {
// Magnetometer
mag.read();
// Magnetometer x, y, z
magX = mag.m.x;
magY = mag.m.y;
magZ = mag.m.z;
// FullString D
FullStringD = "Magnetometer X = " + String(magX) + " Magnetometer Y = "
+ String(magY) + " Magnetometer Z = " + String(magZ)
+ "\r\n";
// FullStringD Bluetooth Serial + Serial
for(int i = 0; i < FullStringD.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringD.c_str()[i]);
// Serial
Serial.write(FullStringD.c_str()[i]);
}
}
setup.ino
// Setup
void setup()
{
// Serial Begin
Serial.begin(9600);
Serial.println("Starting BLE work!");
// Bluetooth Serial
SerialBT.begin("Don Luc Electronics");
Serial.println("Bluetooth Started! Ready to pair...");
// Give display time to power on
delay(100);
// Wire - Inialize I2C Hardware
Wire.begin();
// Give display time to power on
delay(100);
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// Setup IMU
setupIMU();
// Setup Magnetometer
setupMag();
// Setup Barometer
isSetupBarometer();
// Initialize digital pin LED_BUILTIN as an output
pinMode(LED_BUILTIN, OUTPUT);
// Turn the LED on HIGH
digitalWrite(LED_BUILTIN, HIGH);
}
——
Arduino Uno
RX – Digital 3
TX – Digital 2
VIN – +3.3V
GND – GND
——
DL2307Mk04pr.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Bluetooth Pololu AltIMU-10 - Mk23
26-23
DL2307Mk04pr.ino
1 x Arduino Uno
1 x SparkFun RedBoard Qwiic
1 x SparkFun Bluetooth Mate Silver
1 x SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
1 x SparkFun Air Quality Breakout - CCS811
1 x Pololu AltIMU-10 v5
1 x Lithium Ion Battery - 85mAh
2 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Software Serial
#include <SoftwareSerial.h>
// Software Serial
// TX-O pin of bluetooth mate, Arduino D2
int bluetoothTx = 2;
// RX-I pin of bluetooth mate, Arduino D3
int bluetoothRx = 3;
// Bluetooth
SoftwareSerial bluetooth(bluetoothTx, bluetoothRx);
// BTA
//String BTA = "0006664FDC9E";
// Software Version Information
String sver = "26-23";
void loop() {
// isBluetooth
isBluetooth();
}
getBluetooth.ino
// Bluetooth
// Setup Bluetooth
void isSetupBluetooth(){
// Setup Bluetooth
// Begin the serial monitor at 9600bps
Serial.begin(9600);
// Bluetooth
// The Bluetooth Mate defaults to 115200bps
bluetooth.begin(115200);
// Print three times individually
bluetooth.print("$");
bluetooth.print("$");
bluetooth.print("$");
// Enter command mode
// Short delay, wait for the Mate to send back CMD
delay(100);
// Temporarily Change the baudrate to 9600, no parity
bluetooth.println("U,9600,N");
// 115200 can be too fast at times for NewSoftSerial to relay the data reliably
// Start bluetooth serial at 9600
bluetooth.begin(9600);
}
// isBluetooth
void isBluetooth() {
// If the bluetooth sent any characters
if(bluetooth.available())
{
// Send any characters the bluetooth prints to the serial monitor
Serial.print((char)bluetooth.read());
}
// If stuff was typed in the serial monitor
if(Serial.available())
{
// Send any characters the Serial monitor prints to the bluetooth
bluetooth.print((char)Serial.read());
}
}
setup.ino
// Setup
void setup()
{
// Setup Bluetooth
isSetupBluetooth();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
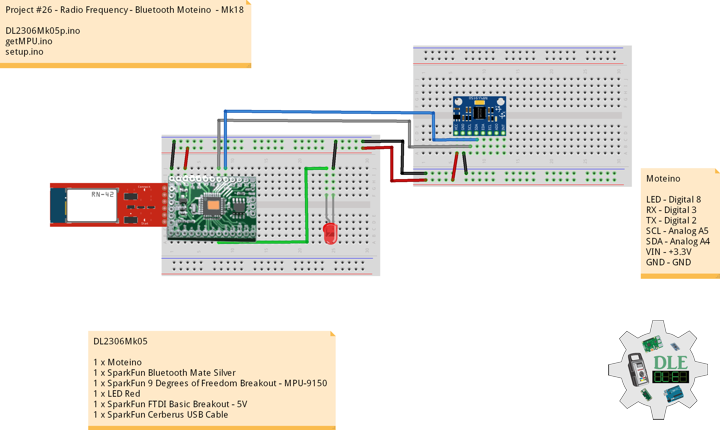
Project #26 – Radio Frequency – Bluetooth Moteino – Mk18
——
#DonLucElectronics #DonLuc #RadioFrequency #Bluetooth #Accelerometer #Magnetometer #Gyroscope #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——

——

——
Moteino
Moteino began as a low power wireless Arduino compatible development platform based on the popular ATmega328p chip used in the Arduino UNO. Moteinos are compatible and can communicate with any other Arduino or development platform that uses the popular HopeRF RFM69 or LoRa transceivers, or even the older RFM12B. Moteino also comes with an optional SPI flash memory chip for wireless programming, or data logging. Moteino was designed to be a compact, highly customizable and affordable development platform, suitable for IoT, home automation and long range wireless projects.
Moteino in RFM12B to rebuild suggests doing as new without completely replacing. I decided to stripped down at RFM12B and rebuild in Bluetooth.
DL2306Mk05
1 x Moteino
1 x SparkFun Bluetooth Mate Silver
1 x SparkFun 9 Degrees of Freedom Breakout – MPU-9150
1 x LED Red
1 x SparkFun FTDI Basic Breakout – 5V
1 x SparkFun Cerberus USB Cable
Moteino
LED – Digital 8
RX – Digital 3
TX – Digital 2
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2306Mk05p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Bluetooth Moteino - Mk18
26-18
DL2306Mk05p.ino
1 x Moteino
1 x SparkFun Bluetooth Mate Silver
1 x SparkFun 9 Degrees of Freedom Breakout - MPU-9150
1 x LED Red
1 x SparkFun FTDI Basic Breakout - 5V
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Software Serial
#include <SoftwareSerial.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// I2CDev I2C utilities
#include "I2Cdev.h"
// MPU9150Lib 9-axis fusion
#include "MPU9150Lib.h"
// CalLib magnetometer and accelerometer calibration
#include "CalLib.h"
// Motion Driver InvenSense Embedded SDK v5.1
#include <dmpKey.h>
#include <dmpmap.h>
#include <inv_mpu.h>
#include <inv_mpu_dmp_motion_driver.h>
// EEPROM Magnetometer and Accelerometer data is stored
#include <EEPROM.h>
// the MPU object
MPU9150Lib MPU;
// MPU_UPDATE_RATE defines the rate (in Hz)
// at which the MPU updates the sensor data and DMP output
#define MPU_UPDATE_RATE (20)
// MAG_UPDATE_RATE defines the rate (in Hz) at which the
// MPU updates the magnetometer data
// MAG_UPDATE_RATE should be less than or equal to the MPU_UPDATE_RATE
#define MAG_UPDATE_RATE (10)
// MPU_MAG_MIX defines the influence that the magnetometer has on the yaw output.
// The magnetometer itself is quite noisy so some mixing with the gyro yaw can help
// significantly. Some example values are defined below:
// Just use gyro yaw
#define MPU_MAG_MIX_GYRO_ONLY 0
// Just use magnetometer and no gyro yaw
#define MPU_MAG_MIX_MAG_ONLY 1
// A good mix value
#define MPU_MAG_MIX_GYRO_AND_MAG 10
// mainly gyros with a bit of mag correction
#define MPU_MAG_MIX_GYRO_AND_SOME_MAG 50
// MPU_LPF_RATE is the low pas filter rate and can be between 5 and 188Hz
#define MPU_LPF_RATE 5
// This is our earth frame gravity vector - quaternions and vectors
MPUQuaternion gravity;
// Quaternion Result
float Quaternion_X = 0.0;
float Quaternion_Y = 0.0;
float Quaternion_Z = 0.0;
// SERIAL_PORT_SPEED defines the speed to use for the debug serial port
#define SERIAL_PORT_SPEED 115200
// Software Serial
// TX-O pin of bluetooth mate, Arduino D2
int bluetoothTx = 2;
// RX-I pin of bluetooth mate, Arduino D3
int bluetoothRx = 3;
// Bluetooth
SoftwareSerial bluetooth(bluetoothTx, bluetoothRx);
// BTA
String BTA = "0006664FAE18";
// LED Red
int iLedRed = 8;
// Variable to calculate frequency
unsigned long curr = 0;
unsigned long last = 0;
unsigned long freq;
// Software Version Information
String sver = "26-18";
void loop() {
// MPU
isMPU();
}
getMPU.ino
// MPU
// Setup MPU
void isSetupMPU() {
// MPU
MPU.init(MPU_UPDATE_RATE, MPU_MAG_MIX_GYRO_AND_MAG, MAG_UPDATE_RATE, MPU_LPF_RATE); // start the MPU
// Set up the initial gravity vector for quaternion rotation
// Max value down the z axis
gravity[QUAT_W] = 0;
gravity[QUAT_X] = 0;
gravity[QUAT_Y] = 0;
gravity[QUAT_Z] = SENSOR_RANGE;
}
// MPU
void isMPU() {
// Quaternion
// This is our body frame gravity vector
MPUQuaternion rotatedGravity;
// This is the conjugate of the fused quaternion
MPUQuaternion fusedConjugate;
// Used in the rotation
MPUQuaternion qTemp;
// The accelerations
MPUVector3 result;
// Get the latest data
if (MPU.read()) {
// Need this for the rotation
MPUQuaternionConjugate(MPU.m_fusedQuaternion, fusedConjugate);
// Rotate the gravity vector into the body frame
MPUQuaternionMultiply(gravity, MPU.m_fusedQuaternion, qTemp);
MPUQuaternionMultiply(fusedConjugate, qTemp, rotatedGravity);
// Now subtract rotated gravity from the body accels to get real accelerations.
// Note that signs are reversed to get +ve acceleration results
// in the conventional axes.
// Quaternion Result
Quaternion_X = -(MPU.m_calAccel[VEC3_X] - rotatedGravity[QUAT_X]);
Quaternion_Y = -(MPU.m_calAccel[VEC3_Y] - rotatedGravity[QUAT_Y]);
Quaternion_Z = -(MPU.m_calAccel[VEC3_Z] - rotatedGravity[QUAT_Z]);
// Variable to calculate frequency
curr = micros();
freq = curr - last;
last = curr;
// Bluetooth
Serial.print( "Blue|" + BTA + "|" );
Serial.print( Quaternion_X );
Serial.print( "|" );
Serial.print( Quaternion_Y );
Serial.print( "|" );
Serial.print( Quaternion_Z );
Serial.print( "|" );
Serial.print( freq );
Serial.println( "|*" );
// Send any characters the Serial monitor prints to the bluetooth
bluetooth.print((char)Serial.read());
}
}
setup.ino
// Setup
void setup()
{
// Serial
Serial.begin(SERIAL_PORT_SPEED);
// Bluetooth
// The Bluetooth Mate defaults to 115200bps
bluetooth.begin(115200);
// LED Red
pinMode(iLedRed, OUTPUT);
digitalWrite(iLedRed, HIGH);
// Give display time to power on
delay(100);
// Wire communicate with I2C / TWI devices
Wire.begin();
// Pause
delay(50);
// Setup MPU
isSetupMPU();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
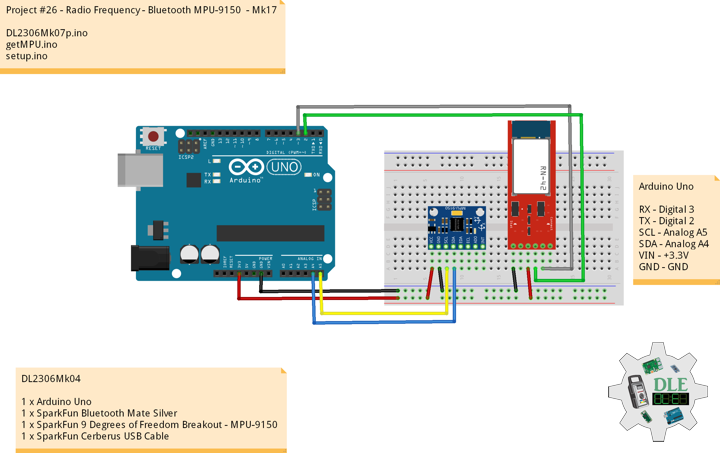
Project #26 – Radio Frequency – Bluetooth MPU-9150 – Mk17
——
#DonLucElectronics #DonLuc #RadioFrequency #Bluetooth #Accelerometer #Magnetometer #Gyroscope #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——

——
——
MPU-9150
MotionInterface is becoming a “Must-Have” function being adopted by smartphone and tablet manufacturers due to the enormous value it adds to the end user experience. In smartphones, it finds use in applications such as gesture commands for applications and phone control, enhanced gaming, augmented reality, panoramic photo capture and viewing, and pedestrian and vehicle navigation. With its ability to precisely and accurately track user motions, MotionTracking technology can convert handsets and tablets into powerful 3D intelligent devices that can be used in applications ranging from health and fitness monitoring to location-based services. Key requirements for MotionInterface enabled devices are small package size, low power consumption, high accuracy and repeatability, high shock tolerance, and application specific performance programmability, all at a low consumer price point.
DL2306Mk04
1 x Arduino Uno
1 x SparkFun Bluetooth Mate Silver
1 x SparkFun 9 Degrees of Freedom Breakout – MPU-9150
1 x SparkFun Cerberus USB Cable
Arduino Uno
RX – Digital 3
TX – Digital 2
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2306Mk04p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Bluetooth MPU-9150 - Mk17
26-17
DL2306Mk07p.ino
1 x Arduino Uno
1 x SparkFun Bluetooth Mate Silver
1 x SparkFun 9 Degrees of Freedom Breakout - MPU-9150
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Software Serial
#include <SoftwareSerial.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// I2CDev I2C utilities
#include "I2Cdev.h"
// MPU9150Lib 9-axis fusion
#include "MPU9150Lib.h"
// CalLib magnetometer and accelerometer calibration
#include "CalLib.h"
// Motion Driver InvenSense Embedded SDK v5.1
#include <dmpKey.h>
#include <dmpmap.h>
#include <inv_mpu.h>
#include <inv_mpu_dmp_motion_driver.h>
// EEPROM Magnetometer and Accelerometer data is stored
#include <EEPROM.h>
// the MPU object
MPU9150Lib MPU;
// MPU_UPDATE_RATE defines the rate (in Hz)
// at which the MPU updates the sensor data and DMP output
#define MPU_UPDATE_RATE (20)
// MAG_UPDATE_RATE defines the rate (in Hz) at which the
// MPU updates the magnetometer data
// MAG_UPDATE_RATE should be less than or equal to the MPU_UPDATE_RATE
#define MAG_UPDATE_RATE (10)
// MPU_MAG_MIX defines the influence that the magnetometer has on the yaw output.
// The magnetometer itself is quite noisy so some mixing with the gyro yaw can help
// significantly. Some example values are defined below:
// Just use gyro yaw
#define MPU_MAG_MIX_GYRO_ONLY 0
// Just use magnetometer and no gyro yaw
#define MPU_MAG_MIX_MAG_ONLY 1
// A good mix value
#define MPU_MAG_MIX_GYRO_AND_MAG 10
// mainly gyros with a bit of mag correction
#define MPU_MAG_MIX_GYRO_AND_SOME_MAG 50
// MPU_LPF_RATE is the low pas filter rate and can be between 5 and 188Hz
#define MPU_LPF_RATE 5
// This is our earth frame gravity vector - quaternions and vectors
MPUQuaternion gravity;
// Quaternion Result
float Quaternion_X = 0.0;
float Quaternion_Y = 0.0;
float Quaternion_Z = 0.0;
// SERIAL_PORT_SPEED defines the speed to use for the debug serial port
#define SERIAL_PORT_SPEED 115200
// Software Serial
// TX-O pin of bluetooth mate, Arduino D2
int bluetoothTx = 2;
// RX-I pin of bluetooth mate, Arduino D3
int bluetoothRx = 3;
// Bluetooth
SoftwareSerial bluetooth(bluetoothTx, bluetoothRx);
// BTA
String BTA = "0006664FDC9E";
// Variable to calculate frequency
unsigned long curr = 0;
unsigned long last = 0;
unsigned long freq;
// Software Version Information
String sver = "26-17";
void loop() {
// MPU
isMPU();
}
getMPU.ino
// MPU
// Setup MPU
void isSetupMPU() {
// MPU
MPU.init(MPU_UPDATE_RATE, MPU_MAG_MIX_GYRO_AND_MAG, MAG_UPDATE_RATE, MPU_LPF_RATE); // start the MPU
// Set up the initial gravity vector for quaternion rotation
// Max value down the z axis
gravity[QUAT_W] = 0;
gravity[QUAT_X] = 0;
gravity[QUAT_Y] = 0;
gravity[QUAT_Z] = SENSOR_RANGE;
}
// MPU
void isMPU() {
// Quaternion
// This is our body frame gravity vector
MPUQuaternion rotatedGravity;
// This is the conjugate of the fused quaternion
MPUQuaternion fusedConjugate;
// Used in the rotation
MPUQuaternion qTemp;
// The accelerations
MPUVector3 result;
// Get the latest data
if (MPU.read()) {
// Need this for the rotation
MPUQuaternionConjugate(MPU.m_fusedQuaternion, fusedConjugate);
// Rotate the gravity vector into the body frame
MPUQuaternionMultiply(gravity, MPU.m_fusedQuaternion, qTemp);
MPUQuaternionMultiply(fusedConjugate, qTemp, rotatedGravity);
// Now subtract rotated gravity from the body accels to get real accelerations.
// Note that signs are reversed to get +ve acceleration results
// in the conventional axes.
// Quaternion Result
Quaternion_X = -(MPU.m_calAccel[VEC3_X] - rotatedGravity[QUAT_X]);
Quaternion_Y = -(MPU.m_calAccel[VEC3_Y] - rotatedGravity[QUAT_Y]);
Quaternion_Z = -(MPU.m_calAccel[VEC3_Z] - rotatedGravity[QUAT_Z]);
// Variable to calculate frequency
curr = micros();
freq = curr - last;
last = curr;
// Bluetooth
Serial.print( "Blue|" + BTA + "|" );
Serial.print( Quaternion_X );
Serial.print( "|" );
Serial.print( Quaternion_Y );
Serial.print( "|" );
Serial.print( Quaternion_Z );
Serial.print( "|" );
Serial.print( freq );
Serial.println( "|*" );
// Send any characters the Serial monitor prints to the bluetooth
bluetooth.print((char)Serial.read());
}
}
setup.ino
// Setup
void setup()
{
// Serial
Serial.begin(SERIAL_PORT_SPEED);
// Bluetooth
// The Bluetooth Mate defaults to 115200bps
bluetooth.begin(115200);
// Give display time to power on
delay(100);
// Wire communicate with I2C / TWI devices
Wire.begin();
// Pause
delay(50);
// Setup MPU
isSetupMPU();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #12: Robotics – 9DOF – Mk27
——
#DonLucElectronics #DonLuc #Robotics #Magnetometer #Accelerometer #Gyroscope #MicroOLED # #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
SparkFun 9 Degrees of Freedom – Sensor Stick
The SparkFun 9DOF Sensor Stick is a very small sensor board with 9 degrees of freedom. It includes the ADXL345 accelerometer, the HMC5883L magnetometer, and the ITG-3200 MEMS gyro. The “Stick” has a simple I2C interface and a mounting hole for attaching it to your project. Also, the board is a mere allowing it to be easily mounted in just about any application.
DL2305Mk03
1 x SparkFun RedBoard Qwiic
1 x ProtoScrewShield
1 x SparkFun 9 Degrees of Freedom – Sensor Stick
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
2 x Pololu DRV8834 Low-Voltage Stepper Motor Driver Carrier
2 x Electrolytic Decoupling Capacitors – 100uF/25V
2 x Pololu Stepper Motor Bipolar, 2.8V, 1.7 A/Phase
2 x Pololu Universal Aluminum Mounting Hub for 5mm Shaft, M3 Holes
1 x SparkFun Solderable Breadboard – Large
1 x SparkFun Cerberus USB Cable
SparkFun RedBoard Qwiic
SDA – Analog A5
SCL – Analog A4
JH – Analog A0
JV – Analog A1
JS – Digital 2
DIR – Digital 7
SPR – Digital 8
DIL – Digital 9
SPL – Digital 10
LED – Digital 13
VIN – +3.3V
VIN – +5V
GND – GND
——
DL2305Mk03p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #12: Robotics - 9DOF - Mk27
12-27
DL2305Mk03p.ino
1 x SparkFun RedBoard Qwiic
1 x ProtoScrewShield
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
2 x Pololu DRV8834 Low-Voltage Stepper Motor Driver Carrier
2 x Electrolytic Decoupling Capacitors - 100uF/25V
2 x Pololu Stepper Motor Bipolar, 2.8V, 1.7 A/Phase
2 x Pololu Universal Aluminum Mounting Hub for 5mm Shaft, M3 Holes
1 x SparkFun Solderable Breadboard - Large
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Arduino
#include <Arduino.h>
// DRV8834 Stepper Motor Driver
#include <BasicStepperDriver.h>
#include <MultiDriver.h>
// Wire communicate with I2C / TWI devices
#include <Wire.h>
// SparkFun Micro OLED
#include <SFE_MicroOLED.h>
// Accelerometer
#include <ADXL345.h>
// Magnetometer
#include <HMC58X3.h>
// MEMS Gyroscope
#include <ITG3200.h>
// Debug
#include "DebugUtils.h"
// FreeIMU
#include <CommunicationUtils.h>
#include <FreeIMU.h>
// DRV8834 Stepper Motor Driver
// Stepper motor steps per revolution.
// Most steppers are 200 steps or 1.8 degrees/step
#define MOTOR_STEPS 200
// Target RPM for X axis stepper motor
#define MOTOR_X_RPM 800
// Target RPM for Y axis stepper motor
#define MOTOR_Y_RPM 800
// Since microstepping is set externally,
// make sure this matches the selected mode
// If it doesn't, the motor will move at a
// different RPM than chosen
// 1=full step, 2=half step etc.
#define MICROSTEPS 1
// X Stepper motor
#define DIR_X 7
#define STEP_X 8
// Y Stepper motor
#define DIR_Y 9
#define STEP_Y 10
// BasicStepperDriver
BasicStepperDriver stepperX(MOTOR_STEPS, DIR_X, STEP_X);
BasicStepperDriver stepperY(MOTOR_STEPS, DIR_Y, STEP_Y);
// Pick one of the two controllers below
// each motor moves independently
MultiDriver controller(stepperX, stepperY);
// Joystick
#define JH A0
#define JV A1
#define JS 2
// Variable for reading the button
int JSState = 0;
// Adjusted Value
int adjustedValue = 0;
int adjustedValue2 = 0;
// LED Yellow
int iLED = 13;
// SparkFun Micro OLED
#define PIN_RESET 9
#define DC_JUMPER 1
// I2C declaration
MicroOLED oled(PIN_RESET, DC_JUMPER);
// Set the FreeIMU object
FreeIMU my3IMU = FreeIMU();
// Yaw Pitch Roll
float ypr[3];
float Yaw = 0;
float Pitch = 0;
float Roll = 0;
// Software Version Information
String sver = "12-27";
void loop() {
// Button
isButton();
// Joystick
isThumbJoystick();
// Stepper
isStepper();
// isFreeIMU
isFreeIMU();
// Micro OLED
isMicroOLED();
}
getButton.ino
// Button
// Button Setup
void isButtonSetup() {
// Make the button line an input
pinMode(JS, INPUT_PULLUP);
// Initialize digital pin iLED as an output
pinMode(iLED, OUTPUT);
}
// Button
void isButton(){
// Read the state of the button
JSState = digitalRead(JS);
// Check if the button is pressed.
// If it is, the JSState is HIGH:
if (JSState == HIGH) {
// Button
// Turn the LED on HIGH
digitalWrite(iLED, HIGH);
} else {
// Button
// Turn the LED on LOW
digitalWrite(iLED, LOW);
}
}
getFreeIMU.ino
// FreeIMU
// isFreeIMUSetup
void isFreeIMUSetup(){
// Pause
delay(5);
// Initialize IMU
my3IMU.init();
// Pause
delay(5);
}
// isFreeIMU
void isFreeIMU(){
// FreeIMU
// Yaw Pitch Roll
my3IMU.getYawPitchRoll(ypr);
// Yaw
Yaw = ypr[0];
// Pitch
Pitch = ypr[1];
// Roll
Roll = ypr[2];
}
getMicroOLED.ino
// SparkFun Micro OLED
// Micro OLED Setup
void isMicroOLEDSetup() {
// Initialize the OLED
oled.begin();
// Clear the display's internal memory
oled.clear(ALL);
// Display what's in the buffer (Splash Screen SparkFun)
oled.display();
// Delay 1000 ms
delay(1000);
// Clear the buffer.
oled.clear(PAGE);
}
// Micro OLED
void isMicroOLED() {
// Text Display FreeIMU
// Clear the display
oled.clear(PAGE);
// Set cursor to top-left
oled.setCursor(0, 0);
// Set font to type 0
oled.setFontType(0);
// Horizontal
oled.print("H: ");
oled.print( adjustedValue );
// Vertical
oled.setCursor(0, 11);
oled.print("V: ");
oled.print( adjustedValue2 );
// Yaw
oled.setCursor(0, 21);
oled.print("Y: ");
oled.print(Yaw);
// Pitch
oled.setCursor(0, 31);
oled.print("P: ");
oled.print(Pitch);
// Roll
oled.setCursor(0, 41);
oled.print("R: ");
oled.print(Roll);
oled.display();
}
getStepper.ino
// Stepper
// isStepperSetup
void isStepperSetup() {
// Set stepper target motors RPM.
stepperX.begin(MOTOR_X_RPM, MICROSTEPS);
stepperY.begin(MOTOR_Y_RPM, MICROSTEPS);
}
// Stepper
void isStepper() {
// Stepper => Controller rotate
controller.rotate(adjustedValue, adjustedValue2);
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Joystick JH
// Horizontal
// Joystick Pot Values JH
int potValue = analogRead(JH);
int potValues = 0;
// Adjusted Value
potValues = map(potValue, 0, 1023, 1000, -1000);
if (potValues > 300) {
adjustedValue = potValues;
} else if (potValues < -300) {
adjustedValue = potValues;
} else {
adjustedValue = 0;
}
// Joystick JV
// Vertical
// Joystick Pot Values JV
int potValue2 = analogRead(JV);
int potValues2 = 0;
// Adjusted Value2
potValues2 = map(potValue2, 0, 1023, 1000, -1000);
if (potValues2 > 300) {
adjustedValue2 = potValues2;
} else if (potValues2 < -300) {
adjustedValue2 = potValues2;
} else {
adjustedValue2 = 0;
}
}
setup.ino
// Setup
void setup()
{
// Wire communicate with I2C / TWI devices
Wire.begin();
// Setup Micro OLED
isMicroOLEDSetup();
// isFreeIMUSetup
isFreeIMUSetup();
// Button Setup
isButtonSetup();
// DRV8834 Stepper Motor Driver
isStepperSetup();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #26 – Radio Frequency – OpenLog – Mk06
——
#DonLucElectronics #DonLuc #RadioFrequency #Moteino #Send #Receive #OpenLog #Display #FreeIMU #Magnetometer #Accelerometer #Gyroscope #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
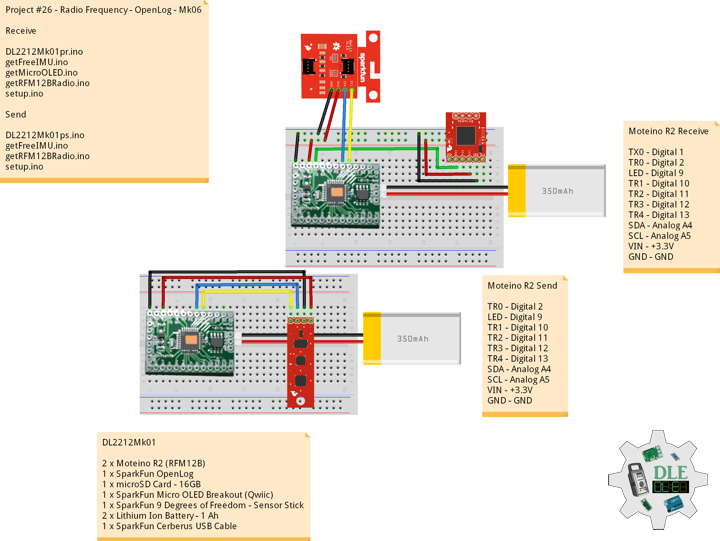
——
——
——
SparkFun OpenLog
The SparkFun OpenLog is an open source data logger that works over a simple serial connection and supports microSD cards up to 32GB. The OpenLog can store or “Log” huge amounts of serial data and act as a black box of sorts to store all the serial data that your project generates, for scientific or debugging purposes.
The SparkFun OpenLog uses an ATmega328 running at 16MHz thanks to the onboard resonator. The OpenLog draws approximately 2-3mA in idle mode. During a full record OpenLog can draw 10 to 20mA depending on the microSD card being used.
All data logged by the OpenLog is stored on the microSD card. Any 512MB to 32GB microSD card should work. OpenLog supports both FAT16 and FAT32 SD formats.
DL2212Mk01
2 x Moteino R2 (RFM12B)
1 x SparkFun OpenLog
1 x microSD Card – 16GB
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom – Sensor Stick
2 x Lithium Ion Battery – 1 Ah
1 x SparkFun Cerberus USB Cable
Moteino R2 (Receive)
TX0 – Digital 1
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2212Mk01pr.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - OpenLog - Mk06
26-06
Receive
DL2212Mk01pr.ino
2 x Moteino R2 (RFM12B)
1 x SparkFun OpenLog
1 x microSD Card - 16GB
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
2 x Lithium Ion Battery - 1Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// SparkFun Micro OLED
#include <SFE_MicroOLED.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 1
// The network ID we are on
#define NETWORKID 99
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Process Message
// Message
String msg = "";
int firstClosingBracket = 0;
// Yaw Pitch Roll
String sYaw = "";
String sPitch = "";
String sRoll = "";
float Yaw = 0;
float Pitch = 0;
float Roll = 0;
// LED
int iLED = 9;
// SparkFun Micro OLED
#define PIN_RESET 9
#define DC_JUMPER 1
// I2C declaration
MicroOLED oled(PIN_RESET, DC_JUMPER);
// Software Version Information
String sver = "26-06";
void loop() {
// is RFM12B Radio
isRFM12BRadio();
// Micro OLED
isMicroOLED();
}
getFreeIMU.ino
// FreeIMU
// isFreeIMU
void isFreeIMU(){
// FreeIMU
// IMU Yaw Pitch Roll
// msg = "<IMU|1000|1000|1000|*";
// msg = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*"
firstClosingBracket = 0;
// "<IMU|"
firstClosingBracket = msg.indexOf('|');
msg.remove(0, 5);
// Yaw
firstClosingBracket = msg.indexOf('|');
sYaw = msg;
sYaw.remove(firstClosingBracket);
Yaw = sYaw.toFloat();
// Pitch
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
sPitch = msg;
sPitch.remove(firstClosingBracket);
Pitch = sPitch.toFloat();
// Roll
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
sRoll = msg;
sRoll.remove(firstClosingBracket);
Roll = sRoll.toFloat();
}
getMicroOLED.ino
// SparkFun Micro OLED
// Setup Micro OLED
void isSetupMicroOLED() {
// Initialize the OLED
oled.begin();
// Clear the display's internal memory
oled.clear(ALL);
// Display what's in the buffer (splashscreen)
oled.display();
// Delay 1000 ms
delay(1000);
// Clear the buffer.
oled.clear(PAGE);
}
// Micro OLED
void isMicroOLED() {
// Text Display FreeIMU
// Clear the display
oled.clear(PAGE);
// Set cursor to top-left
oled.setCursor(0, 0);
// Set font to type 0
oled.setFontType(0);
// FreeIMU
oled.print("FreeIMU");
oled.setCursor(0, 12);
// Yaw
oled.print("Y: ");
oled.print(Yaw);
oled.setCursor(0, 25);
// Pitch
oled.print("P: ");
oled.print(Pitch);
oled.setCursor(0, 39);
// Roll
oled.print("R: ");
oled.print(Roll);
oled.display();
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio()
{
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Transmitting
}
// is RFM12 BRadio
void isRFM12BRadio()
{
// Receive
if (radio.ReceiveComplete())
{
// CRC Pass
if (radio.CRCPass())
{
// Message
msg = "";
// Can also use radio.GetDataLen() if you don't like pointers
for (byte i = 0; i < *radio.DataLen; i++)
{
//Serial.print((char)radio.Data[i]);
msg = msg + (char)radio.Data[i];
}
// Serial
Serial.println( msg );
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// FreeIMU
// Yaw Pitch Roll
isFreeIMU();
// ACK Requested
if (radio.ACKRequested())
{
// Send ACK
radio.SendACK();
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
}
else
{
// BAD-CRC
}
}
}
setup.ino
// Setup
void setup()
{
// Serial
Serial.begin(SERIAL_BAUD);
// Give display time to power on
delay(100);
// Set up I2C bus
Wire.begin();
// Setup Micro OLED
isSetupMicroOLED();
// LED
pinMode( iLED , OUTPUT);
// RFM12B Radio
isSetupRFM12BRadio();
}
——
Moteino R2 (Send)
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2212Mk01ps.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - OpenLog - Mk06
26-06
Send
DL2212Mk01ps.ino
2 x Moteino R2 (RFM12B)
1 x SparkFun OpenLog
1 x microSD Card - 16GB
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
2 x Lithium Ion Battery - 1Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Sleep
#include <avr/sleep.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// Includes and variables for IMU integration
// Accelerometer
#include <ADXL345.h>
// Magnetometer
#include <HMC58X3.h>
// MEMS Gyroscope
#include <ITG3200.h>
// Debug
#include "DebugUtils.h"
// FreeIMU
#include <CommunicationUtils.h>
#include <FreeIMU.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 2
// The network ID we are on
#define NETWORKID 99
// The node ID we're sending to
#define GATEWAYID 1
// # of ms to wait for an ack
#define ACK_TIME 50
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Wait this many ms between sending packets
int interPacketDelay = 1000;
// Input
char input = 0;
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Send Size
byte sendSize = 0;
// Payload
char payload[100];
// Request ACK
bool requestACK = false;
// LED
int iLED = 9;
// Set the FreeIMU object
FreeIMU my3IMU = FreeIMU();
// Yaw Pitch Roll
String zzzzzz = "";
String sYaw = "";
String sPitch = "";
String sRoll = "";
float ypr[3];
float Yaw = 0;
float Pitch = 0;
float Roll = 0;
// Software Version Information
String sver = "26-06";
void loop()
{
// isFreeIMU
isFreeIMU();
// is RFM12B Radio
isRFM12BRadio();
// Inter Packet Delay
delay(interPacketDelay);
}
getFreeIMU.ino
// FreeIMU
// isFreeIMU
void isFreeIMU(){
// FreeIMU
// Yaw Pitch Roll
my3IMU.getYawPitchRoll(ypr);
// Yaw
Yaw = ypr[0];
// Pitch
Pitch = ypr[1];
// Roll
Roll = ypr[2];
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio(){
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Sleep right away to save power
radio.Sleep();
// Transmitting
Serial.println("Transmitting...\n\n");
}
// is RFM12 BRadio
void isRFM12BRadio(){
// sYaw, sPitch, sRoll ""
sYaw = "";
sPitch = "";
sRoll = "";
// sYaw, sPitch, sRoll concat
sYaw.concat(Yaw);
sPitch.concat(Pitch);
sRoll.concat(Roll);
// zzzzzz ""
zzzzzz = "";
// zzzzzz = "<IMU|1000|1000|1000|*";
// zzzzzz = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*"
zzzzzz = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*";
// sendSize Length
sendSize = zzzzzz.length();
// sendSize
payload[sendSize];
// sendSize, charAt
for(byte i = 0; i < sendSize+1; i++){
payload[i] = zzzzzz.charAt(i);
}
// payload
Serial.print(payload);
// Request ACK
requestACK = sendSize;
// Wakeup
radio.Wakeup();
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// Send
radio.Send(GATEWAYID, payload, sendSize, requestACK);
// Request ACK
if (requestACK)
{
Serial.print(" - waiting for ACK...");
if (waitForAck()){
Serial.print("Ok!");
}
else Serial.print("nothing...");
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
// Sleep
radio.Sleep();
// Serial
Serial.println();
}
// Wait a few milliseconds for proper ACK, return true if received
static bool waitForAck(){
// Now
long now = millis();
// ACK
while (millis() - now <= ACK_TIME){
if (radio.ACKReceived(GATEWAYID)){
return true;
}
}
return false;
}
setup.ino
// Setup
void setup(){
// Serial
Serial.begin(SERIAL_BAUD);
// LED
pinMode( iLED , OUTPUT);
// Set up I2C bus
Wire.begin();
// RFM12B Radio
isSetupRFM12BRadio();
// Pause
delay(5);
// Initialize IMU
my3IMU.init();
// Pause
delay(5);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #26 – Radio Frequency – Display – Mk05
——
#DonLucElectronics #DonLuc #RadioFrequency #Moteino #Send #Receive #Display #FreeIMU #Magnetometer #Accelerometer #Gyroscope #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
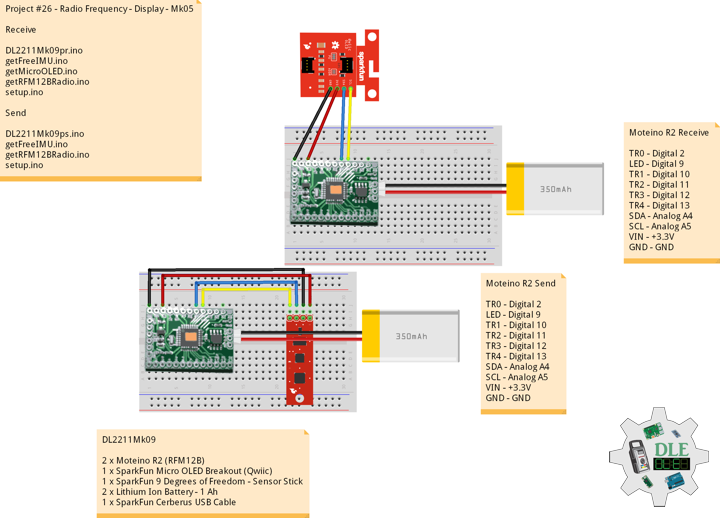
——
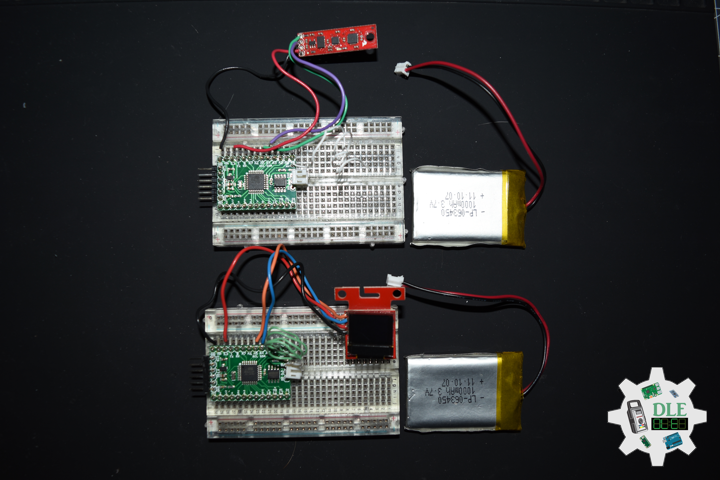
——
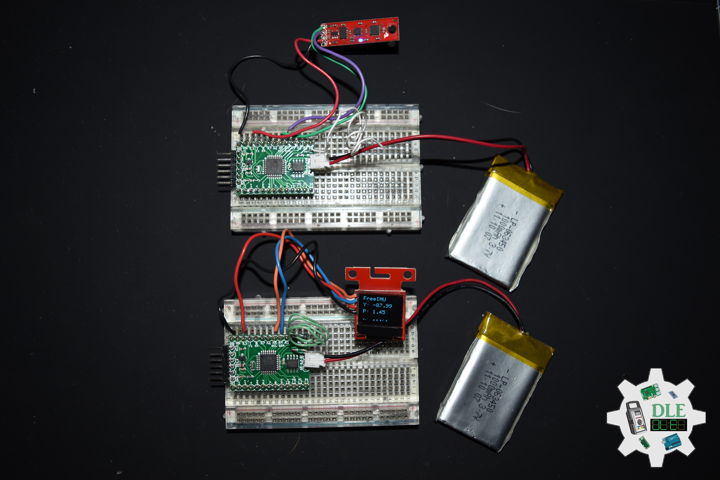
——
SparkFun Micro OLED Breakout
The SparkFun Qwiic Micro OLED Breakout is a Qwiic-enabled version of our popular Micro OLED display. The small monochrome, blue-on-black OLED screen presents incredibly clear images for your viewing pleasure. It’s the OLED display is crisp, and you can fit a deceivingly large amount of graphics on there. This breakout is perfect for adding graphics to your next project and displaying diagnostic information without resorting to a serial output, all with the ease of use of our own Qwiic Connect System.
This version of the Micro OLED Breakout is exactly the size of its non-Qwiic sibling, featuring a screen that is 64 pixels wide and 48 pixels tall and measuring 0.66″ across. But it has also been equipped with two Qwiic connectors, making it ideal for I2C operations. We’ve also added two mounting holes and a convenient Qwiic cable holder incorporated into a detachable tab on the board that can be easily removed thanks to a v-scored edge.
DL2211Mk09
2 x Moteino R2 (RFM12B)
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom – Sensor Stick
2 x Lithium Ion Battery – 1 Ah
1 x SparkFun Cerberus USB Cable
Moteino R2 (Receive)
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2211Mk09pr.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Display - Mk05
26-05
Receive
DL2211Mk09pr.ino
2 x Moteino R2 (RFM12B)
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
2 x Lithium Ion Battery - 1Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// SparkFun Micro OLED
#include <SFE_MicroOLED.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 1
// The network ID we are on
#define NETWORKID 99
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Process Message
// Message
String msg = "";
int firstClosingBracket = 0;
// Yaw Pitch Roll
String sYaw = "";
String sPitch = "";
String sRoll = "";
float Yaw = 0;
float Pitch = 0;
float Roll = 0;
// LED
int iLED = 9;
// SparkFun Micro OLED
#define PIN_RESET 9
#define DC_JUMPER 1
// I2C declaration
MicroOLED oled(PIN_RESET, DC_JUMPER);
// Software Version Information
String sver = "26-05";
void loop() {
// is RFM12B Radio
isRFM12BRadio();
// Micro OLED
isMicroOLED();
}
getFreeIMU.ino
// FreeIMU
// isFreeIMU
void isFreeIMU(){
// FreeIMU
// IMU Yaw Pitch Roll
// msg = "<IMU|1000|1000|1000|*";
// msg = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*"
firstClosingBracket = 0;
// "<IMU|"
firstClosingBracket = msg.indexOf('|');
msg.remove(0, 5);
// Yaw
firstClosingBracket = msg.indexOf('|');
sYaw = msg;
sYaw.remove(firstClosingBracket);
Yaw = sYaw.toFloat();
// Pitch
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
sPitch = msg;
sPitch.remove(firstClosingBracket);
Pitch = sPitch.toFloat();
// Roll
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
sRoll = msg;
sRoll.remove(firstClosingBracket);
Roll = sRoll.toFloat();
}
getMicroOLED.ino
// SparkFun Micro OLED
// Setup Micro OLED
void isSetupMicroOLED() {
// Initialize the OLED
oled.begin();
// Clear the display's internal memory
oled.clear(ALL);
// Display what's in the buffer (splashscreen)
oled.display();
// Delay 1000 ms
delay(1000);
// Clear the buffer.
oled.clear(PAGE);
}
// Micro OLED
void isMicroOLED() {
// Text Display FreeIMU
// Clear the display
oled.clear(PAGE);
// Set cursor to top-left
oled.setCursor(0, 0);
// Set font to type 0
oled.setFontType(0);
// FreeIMU
oled.print("FreeIMU");
oled.setCursor(0, 12);
// Yaw
oled.print("Y: ");
oled.print(Yaw);
oled.setCursor(0, 25);
// Pitch
oled.print("P: ");
oled.print(Pitch);
oled.setCursor(0, 39);
// Roll
oled.print("R: ");
oled.print(Roll);
oled.display();
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio()
{
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Transmitting
Serial.println("Listening...");
}
// is RFM12 BRadio
void isRFM12BRadio()
{
// Receive
if (radio.ReceiveComplete())
{
// CRC Pass
if (radio.CRCPass())
{
// Serial
Serial.print('[');
Serial.print(radio.GetSender());
Serial.print("] ");
// Message
msg = "";
// Can also use radio.GetDataLen() if you don't like pointers
for (byte i = 0; i < *radio.DataLen; i++)
{
Serial.print((char)radio.Data[i]);
msg = msg + (char)radio.Data[i];
}
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// FreeIMU
// Yaw Pitch Roll
isFreeIMU();
// ACK Requested
if (radio.ACKRequested())
{
// Send ACK
radio.SendACK();
Serial.print(" - ACK Sent");
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
}
else
{
// BAD-CRC
Serial.print("BAD-CRC");
}
// Serial
Serial.println();
}
}
setup.ino
// Setup
void setup()
{
// Serial
Serial.begin(SERIAL_BAUD);
// Give display time to power on
delay(100);
// Set up I2C bus
Wire.begin();
// Setup Micro OLED
isSetupMicroOLED();
// LED
pinMode( iLED , OUTPUT);
// RFM12B Radio
isSetupRFM12BRadio();
}
——
Moteino R2 (Send)
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2211Mk09ps.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Display - Mk05
26-05
Send
DL2211Mk09ps.ino
2 x Moteino R2 (RFM12B)
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
2 x Lithium Ion Battery - 1Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Sleep
#include <avr/sleep.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// Includes and variables for IMU integration
// Accelerometer
#include <ADXL345.h>
// Magnetometer
#include <HMC58X3.h>
// MEMS Gyroscope
#include <ITG3200.h>
// Debug
#include "DebugUtils.h"
// FreeIMU
#include <CommunicationUtils.h>
#include <FreeIMU.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 2
// The network ID we are on
#define NETWORKID 99
// The node ID we're sending to
#define GATEWAYID 1
// # of ms to wait for an ack
#define ACK_TIME 50
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Wait this many ms between sending packets
int interPacketDelay = 1000;
// Input
char input = 0;
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Send Size
byte sendSize = 0;
// Payload
char payload[100];
// Request ACK
bool requestACK = false;
// LED
int iLED = 9;
// Set the FreeIMU object
FreeIMU my3IMU = FreeIMU();
// Yaw Pitch Roll
String zzzzzz = "";
String sYaw = "";
String sPitch = "";
String sRoll = "";
float ypr[3];
float Yaw = 0;
float Pitch = 0;
float Roll = 0;
// Software Version Information
String sver = "26-05";
void loop()
{
// isFreeIMU
isFreeIMU();
// is RFM12B Radio
isRFM12BRadio();
// Inter Packet Delay
delay(interPacketDelay);
}
getFreeIMU.ino
// FreeIMU
// isFreeIMU
void isFreeIMU(){
// FreeIMU
// Yaw Pitch Roll
my3IMU.getYawPitchRoll(ypr);
// Yaw
Yaw = ypr[0];
// Pitch
Pitch = ypr[1];
// Roll
Roll = ypr[2];
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio(){
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Sleep right away to save power
radio.Sleep();
// Transmitting
Serial.println("Transmitting...\n\n");
}
// is RFM12 BRadio
void isRFM12BRadio(){
// sYaw, sPitch, sRoll ""
sYaw = "";
sPitch = "";
sRoll = "";
// sYaw, sPitch, sRoll concat
sYaw.concat(Yaw);
sPitch.concat(Pitch);
sRoll.concat(Roll);
// zzzzzz ""
zzzzzz = "";
// zzzzzz = "<IMU|1000|1000|1000|*";
// zzzzzz = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*"
zzzzzz = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*";
// sendSize Length
sendSize = zzzzzz.length();
// sendSize
payload[sendSize];
// sendSize, charAt
for(byte i = 0; i < sendSize+1; i++){
payload[i] = zzzzzz.charAt(i);
}
// payload
Serial.print(payload);
// Request ACK
requestACK = sendSize;
// Wakeup
radio.Wakeup();
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// Send
radio.Send(GATEWAYID, payload, sendSize, requestACK);
// Request ACK
if (requestACK)
{
Serial.print(" - waiting for ACK...");
if (waitForAck()){
Serial.print("Ok!");
}
else Serial.print("nothing...");
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
// Sleep
radio.Sleep();
// Serial
Serial.println();
}
// Wait a few milliseconds for proper ACK, return true if received
static bool waitForAck(){
// Now
long now = millis();
// ACK
while (millis() - now <= ACK_TIME){
if (radio.ACKReceived(GATEWAYID)){
return true;
}
}
return false;
}
setup.ino
// Setup
void setup(){
// Serial
Serial.begin(SERIAL_BAUD);
// LED
pinMode( iLED , OUTPUT);
// Set up I2C bus
Wire.begin();
// RFM12B Radio
isSetupRFM12BRadio();
// Pause
delay(5);
// Initialize IMU
my3IMU.init();
// Pause
delay(5);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc