——
#DonLucElectronics #DonLuc #Buzzer #FlameSensor #AHT20 #FireBeetle2ESP32E #ESP32 #Display #IoT #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——

——
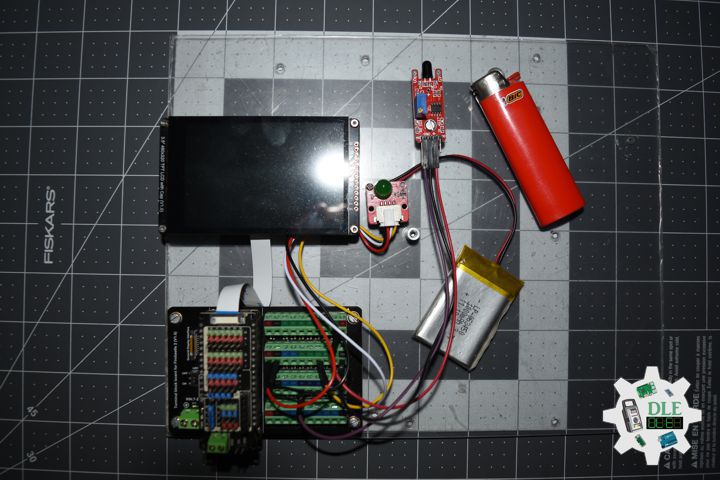
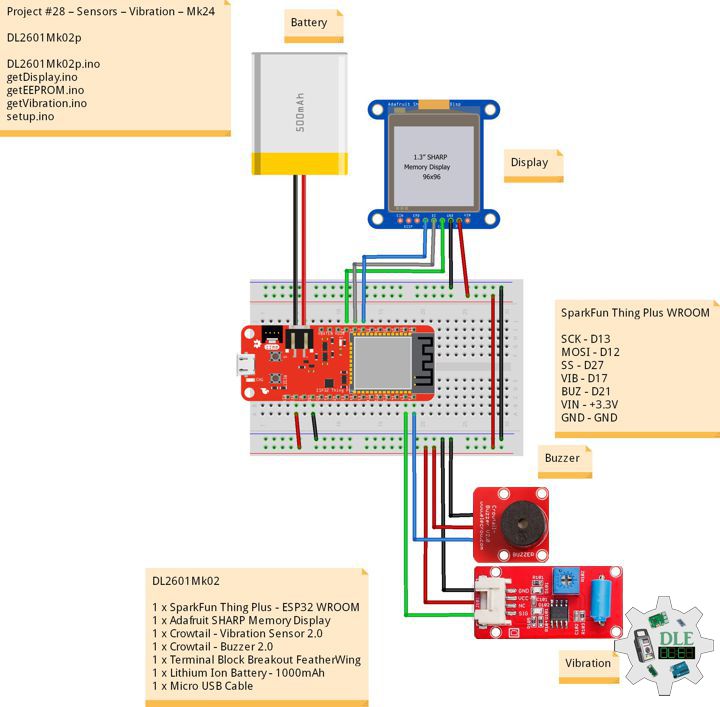
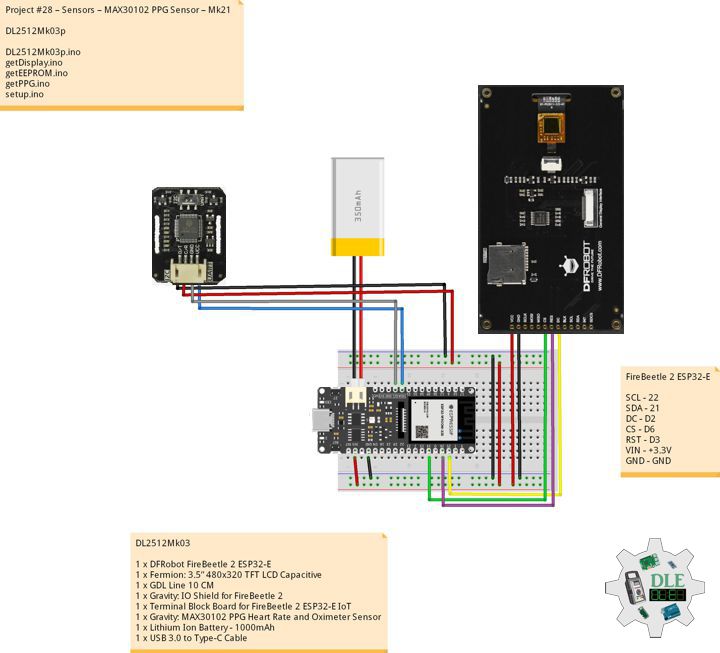
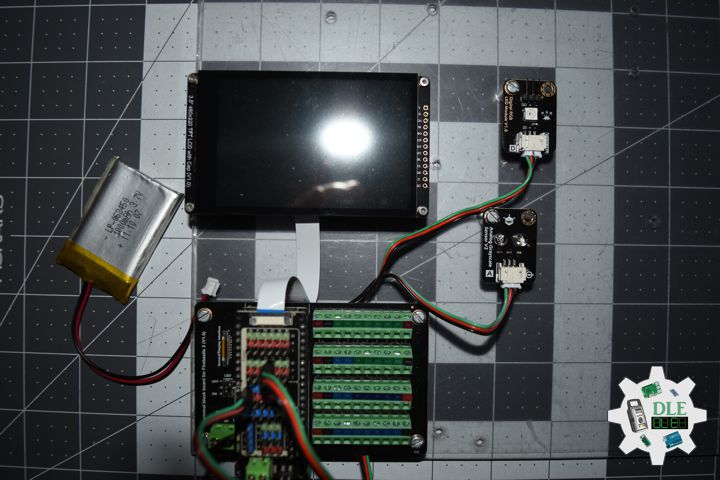
Crowtail – Buzzer 2.0
The buzzer module is for making sound in your project. It sounds when activated by a logic HIGH signal. Connect the buzzer to any of the D (digital) ports of you can easily make it sounds with setting the related ports to logic HIGH. The buzzer module can be also connected to an analog pluse-width modulation (PWM) output to generate various of tones.
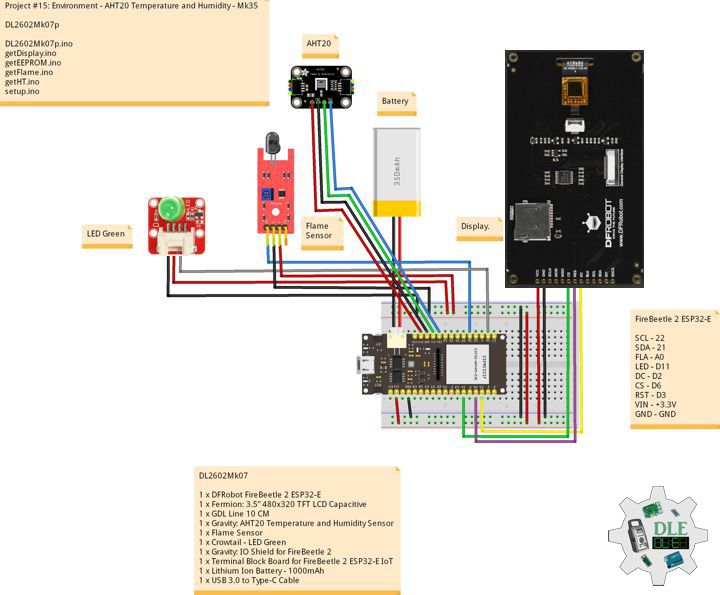
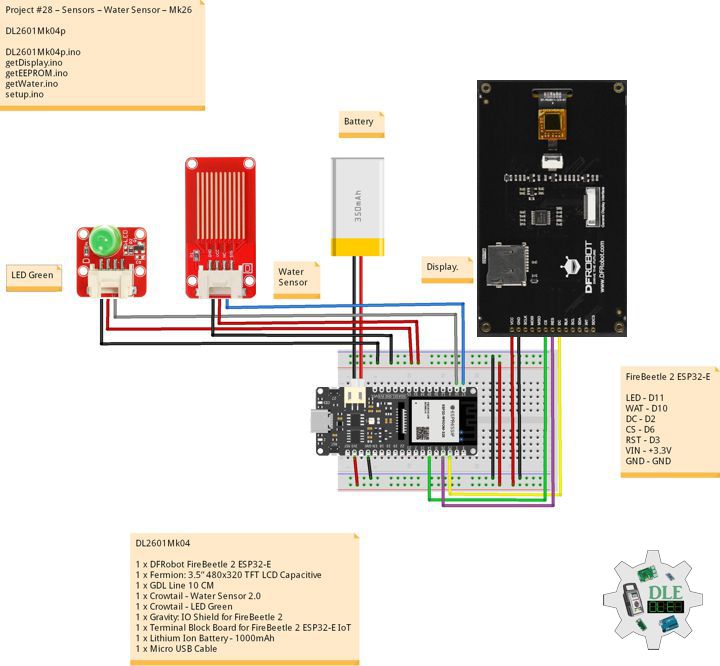
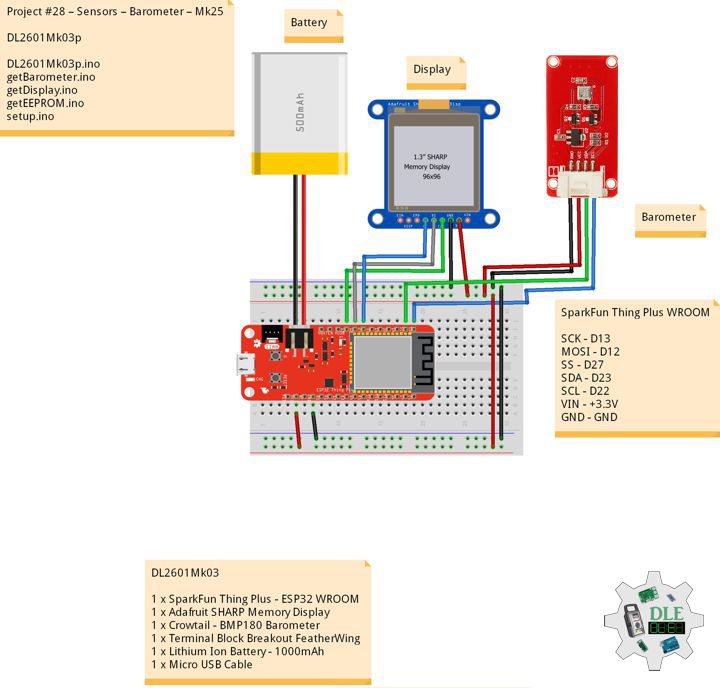
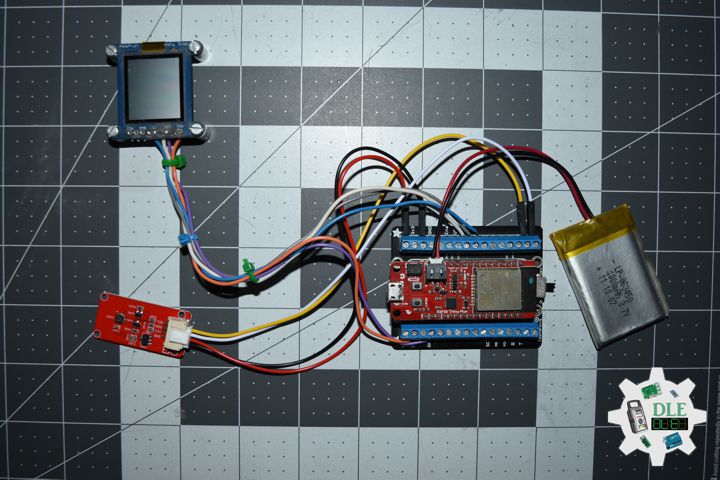
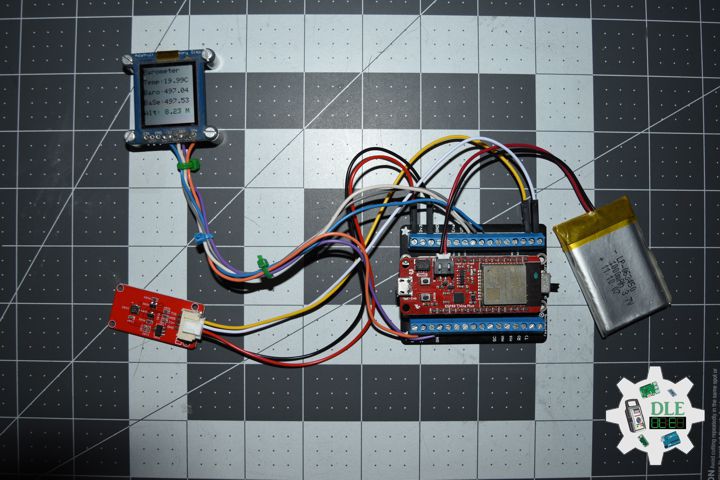
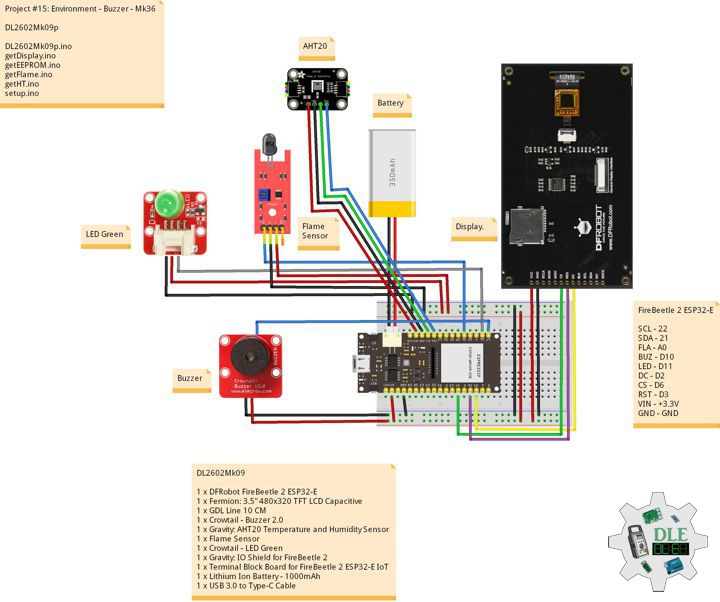
DL2602Mk09
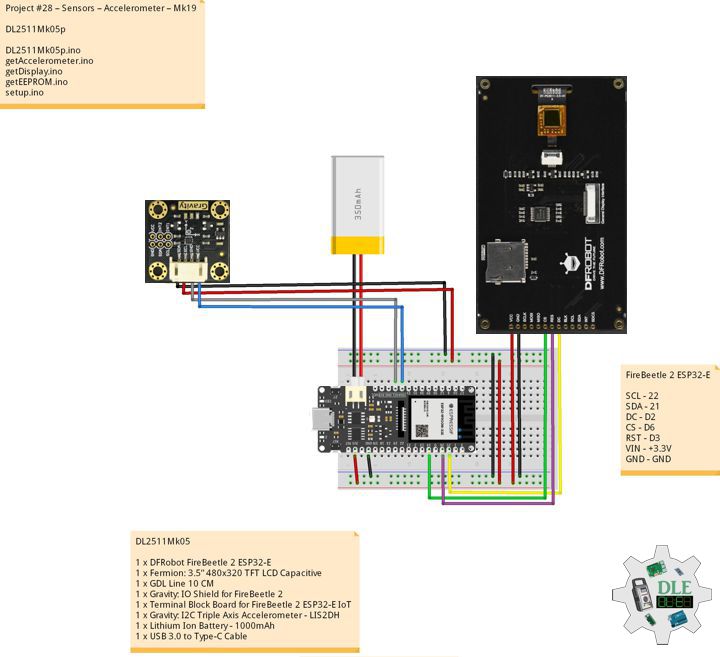
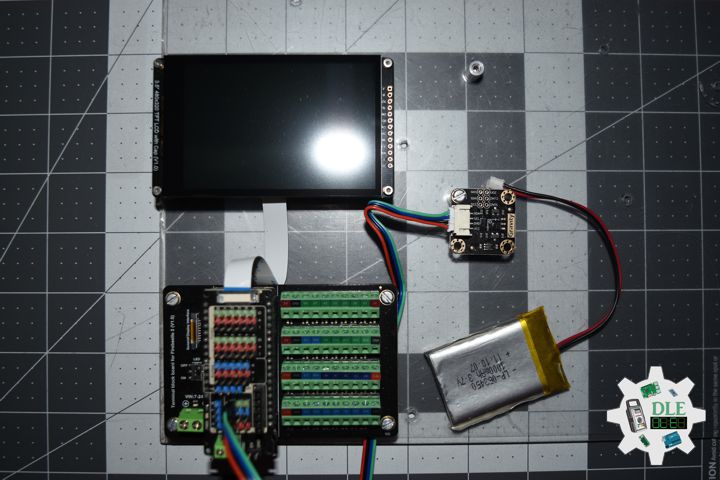
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 3.5” 480×320 TFT LCD Capacitive
1 x GDL Line 10 CM
1 x Crowtail – Buzzer 2.0
1 x Gravity: AHT20 Temperature and Humidity Sensor
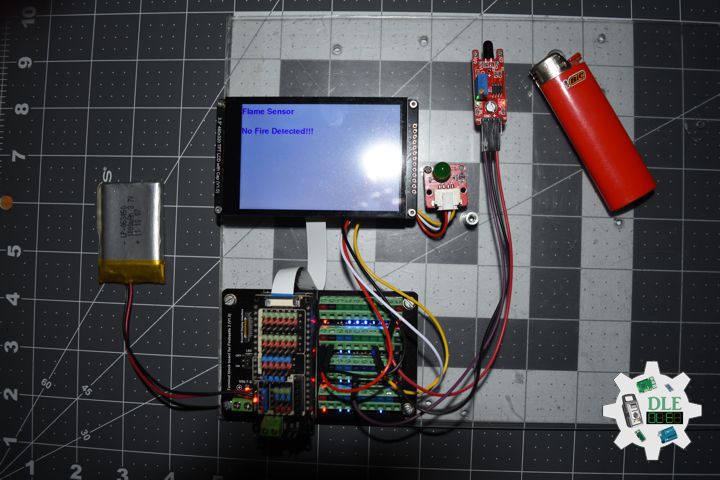
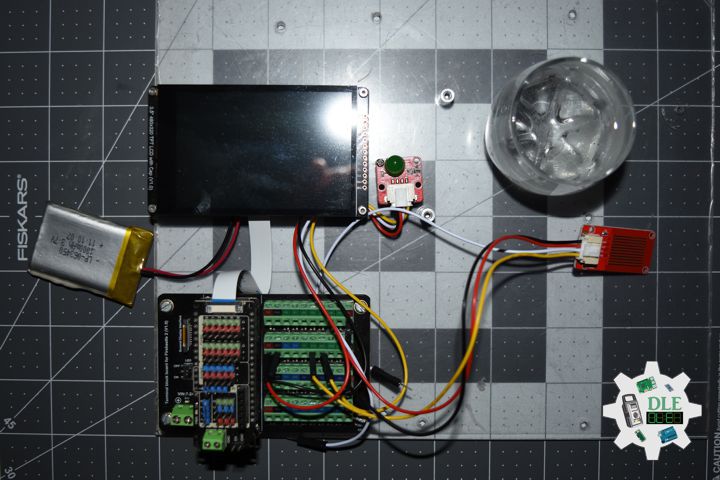
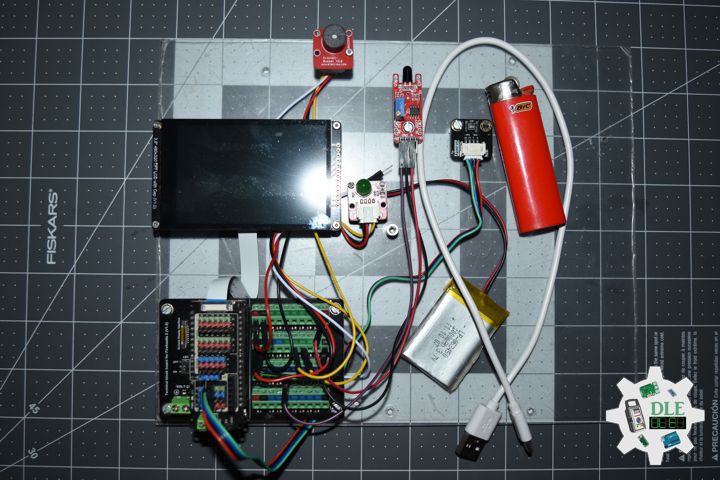
1 x Flame Sensor
1 x Crowtail – LED Green
1 x Gravity: IO Shield for FireBeetle 2
1 x Terminal Block Board for FireBeetle 2 ESP32-E IoT
1 x Lithium Ion Battery – 1000mAh
1 x USB 3.0 to Type-C Cable
DL2602Mk09p
DL2602Mk09p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #15: Environment - Buzzer - Mk36
15-36
DL2602Mk09p.ino
DL2602Mk09
1 x DFRobot FireBeetle 2 ESP32-E
1 x Fermion: 3.5” 480x320 TFT LCD Capacitive
1 x GDL Line 10 CM
1 x Crowtail - Buzzer 2.0
1 x Gravity: AHT20 Temperature and Humidity Sensor
1 x Flame Sensor
1 x Crowtail - LED Green
1 x Gravity: IO Shield for FireBeetle 2
1 x Terminal Block Board for FireBeetle 2 ESP32-E IoT
1 x Lithium Ion Battery - 1000mAh
1 x Micro USB Cable
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM with Unique ID for Unit
#include "EEPROM.h"
// DFRobot Display GDL API
#include <DFRobot_GDL.h>
// AHT20 Humidity and Temperature Sensor
#include <DFRobot_AHT20.h>
// Buzzer
int iBuzzer = D10;
// AHT20 Humidity and Temperature Sensor
DFRobot_AHT20 aht20;
// AHT20 Humidity and Temperature Sensor
float h = 0;
float t = 0;
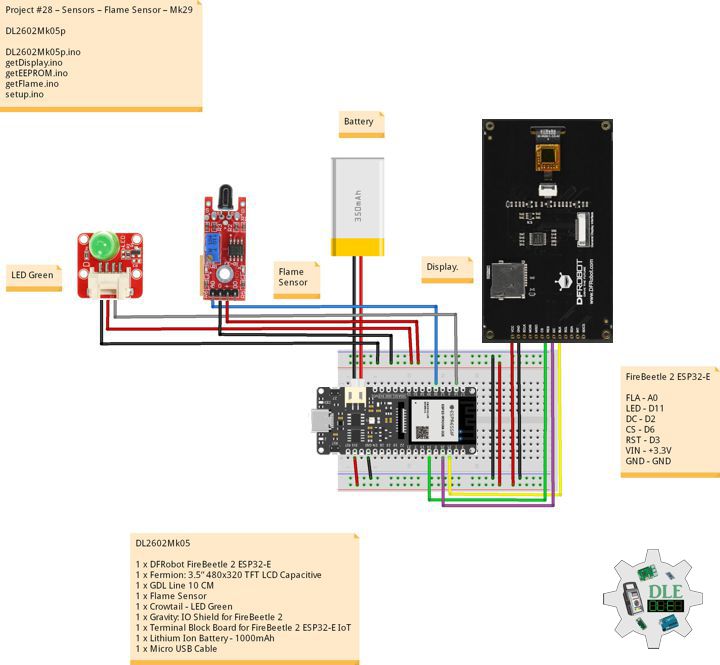
// Flame Sensor
// LED Green
int iLEDG = D11;
// Flame Sensor
int iFlame = A0;
String sF = "";
// Defined ESP32
#define TFT_DC D2
#define TFT_CS D6
#define TFT_RST D3
/*dc=*/ /*cs=*/ /*rst=*/
// DFRobot Display 320x480
DFRobot_ILI9488_320x480_HW_SPI screen(TFT_DC, TFT_CS, TFT_RST);
// Software Version Information
// EEPROM Unique ID Information
#define EEPROM_SIZE 64
String uid = "";
// Software Version Information
String sver = "15-36";
void loop() {
// AHT20 Humidity and Temperature Sensor
isHT();
// Flame Sensor
isFlame();
// isDisplay HT
isDisplayHT();
// Delay 0.1 Second
delay( 100 );
}
getDisplay.ino
// DFRobot Display 320x480
// DFRobot Display 320x480 - UID
void isDisplayUID(){
// DFRobot Display 320x480
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => black
screen.fillScreen(0x0000);
// Text Color => white
screen.setTextColor(0xffff);
// Font => Free Sans Bold 12pt
screen.setFont(&FreeSansBold12pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Don Luc Electronics
screen.setCursor(0, 30);
screen.println("Don Luc Electronics");
// Tilt Switch
screen.setCursor(0, 60);
screen.println("Buzzer");
// Version
screen.setCursor(0, 90);
screen.println("Version");
screen.setCursor(0, 120);
screen.println( sver );
// EEPROM
screen.setCursor(0, 150);
screen.println("EEPROM");
screen.setCursor(0, 180);
screen.println( uid );
}
// isDisplay HT
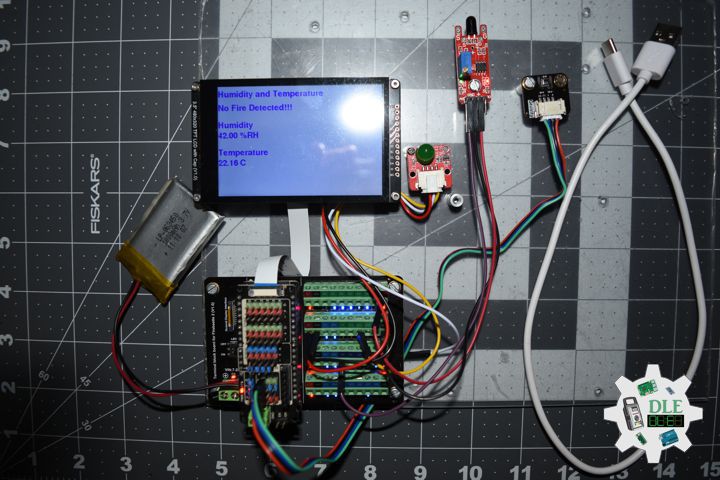
void isDisplayHT(){
// DFRobot Display 320x480
// Text Display
// Text Wrap
screen.setTextWrap(false);
// Rotation
screen.setRotation(3);
// Fill Screen => white
screen.fillScreen(0xffff);
// Text Color => blue
screen.setTextColor(0x001F);
// Font => Free Sans Bold 12pt
screen.setFont(&FreeSansBold12pt7b);
// TextSize => 1.5
screen.setTextSize(1.5);
// Tilt Switch
screen.setCursor(0, 30);
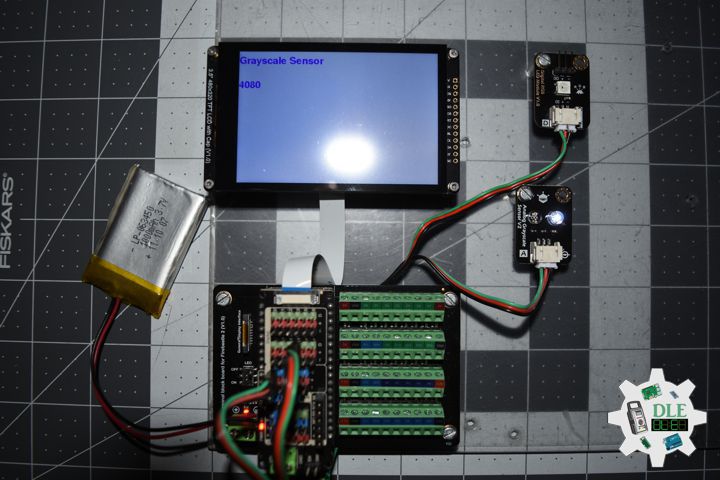
screen.println("Buzzer");
screen.setCursor(0, 70);
screen.println( sF );
screen.setCursor(0, 120);
screen.println("Humidity");
screen.setCursor(0, 150);
screen.print( h );
screen.setCursor(65, 150);
screen.println( "%RH" );
screen.setCursor(0, 200);
screen.println("Temperature");
screen.setCursor(0, 230);
screen.print( t );
screen.setCursor(65, 230);
screen.println( "C" );
}
getEEPROM.ino
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 7; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getFlame.ino
// Flame Sensor
// is Tilt
void isFlame(){
// Flame
// Check if Flame Sensor
if(digitalRead( iFlame) == 0 ){
// Turn LED HIGH
digitalWrite(iLEDG, HIGH);
sF = "Fire Detected!!!";
// iBuzzer On
digitalWrite(iBuzzer, HIGH);
}
else {
// Turn LED LOW
digitalWrite(iLEDG, LOW);
sF = "No Fire Detected!!!";
// iBuzzer Off
digitalWrite(iBuzzer, LOW);
}
}
getHT.ino
// AHT20 Humidity and Temperature Sensor
void isHT(){
if(aht20.startMeasurementReady(true)){
// Humidity
h = aht20.getHumidity_RH();
// Temperature
t = aht20.getTemperature_C();
}
}
setup.ino
// Setup
void setup()
{
// Delay
delay( 100 );
// EEPROM Size
EEPROM.begin(EEPROM_SIZE);
// EEPROM Unique ID
isUID();
// Delay
delay( 100 );
// DFRobot Display 320x480
screen.begin();
// Delay
delay( 100 );
// Flame Sensor
// LED Green
pinMode(iLEDG, OUTPUT);
// Flame Sensor
pinMode(iFlame, INPUT);
// Delay
delay( 100 );
// AHT20 Humidity and Temperature Sensor
aht20.begin();
// Delay
delay( 100 );
// iBuzzer
pinMode(iBuzzer, OUTPUT);
// Delay
delay( 100 );
// DFRobot Display 320x480 - UID
// Don Luc Electronics
// Version
// EEPROM
isDisplayUID();
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Consultant, R&D, Electronics, IoT, Teacher and Instructor
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank , Underwater and UAV Vehicle
- Unmanned Vehicles Terrestrial, Marine and UAV
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2026
https://www.donluc.com/luc/LucPaquinCVEng2026Mk01.pdf
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
DFRobot: https://learn.dfrobot.com/user-10186.html
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Hackster: https://www.hackster.io/luc-paquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc