——
#DonLucElectronics #DonLuc #Synthesizer #Mozzi #Keyboard #ADSREnvelope #Arduino #SparkFunRedBoard #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
4 Stages of an ADSR Envelope
An ADSR envelope features these four stages.
- 1 Attack: The attack phase begins the moment a key is pressed. This phase determines how quickly a sound reaches full volume before entering the decay phase. On an analog synthesizer, this phase is typically instantaneous. Some modern synthesizers allow for the attack time to be delayed.
- 2 Decay: The decay phase determines the length of the drop from the peak level to the sustain level of a sound. The decay time can often be altered to change the overall sound. For instance, a short attack and a long decay will produce a sound that reaches maximum amplitude quickly and falls slowly to the sustain level.
- 3 Sustain: The sustain phase does not specify a length of time. Instead, it determines the volume of a sound for the entire hold time between the decay and release phases.
- 4 Release: The final phase determines the speed at which a sound ends from the moment you release the key. Depending on the desired sound, the release time can be short or long.
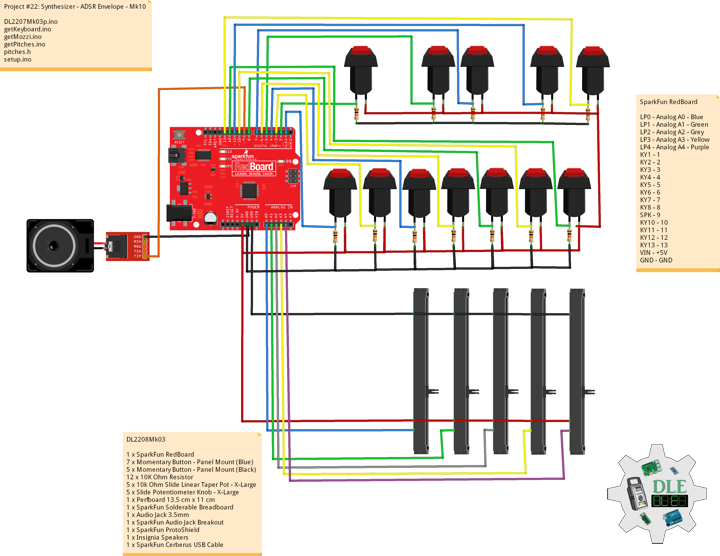
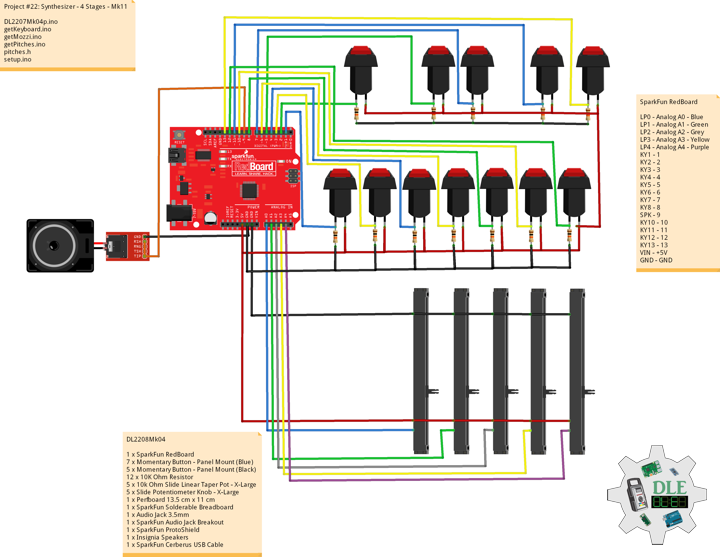
DL2208Mk04
1 x SparkFun RedBoard
7 x Momentary Button – Panel Mount (Blue)
5 x Momentary Button – Panel Mount (Black)
12 x 10K Ohm Resistor
5 x 10k Ohm Slide Linear Taper Pot – X-Large
5 x Slide Potentiometer Knob – X-Large
1 x Perfboard 13.5 cm x 11 cm
1 x SparkFun Solderable Breadboard
1 x Audio Jack 3.5mm
1 x SparkFun Audio Jack Breakout
1 x SparkFun ProtoShield
1 x Insignia Speakers
1 x SparkFun Cerberus USB Cable
SparkFun RedBoard
LP0 – Analog A0 – Blue
LP1 – Analog A1 – Green
LP2 – Analog A2 – Grey
LP3 – Analog A3 – Yellow
LP4 – Analog A4 – Purple
KY1 – 1
KY2 – 2
KY3 – 3
KY4 – 4
KY5 – 5
KY6 – 6
KY7 – 7
KY8 – 8
SPK – 9
KY10 – 10
KY11 – 11
KY12 – 12
KY13 – 13
VIN – +5V
GND – GND
DL2208Mk04p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #22: Synthesizer - 4 Stages - Mk11
22-11
DL2208Mk04p.ino
1 x SparkFun RedBoard
7 x Momentary Button - Panel Mount (Blue)
5 x Momentary Button - Panel Mount (Black)
12 x 1K Ohm Resistor
5 x 10k Ohm Slide Linear Taper Pot - X-Large
5 x Slide Potentiometer Knob - X-Large
1 x Perfboard 13.5 cm x 11 cm
1 x SparkFun Solderable Breadboard
1 x Audio Jack 3.5mm
1 x SparkFun Audio Jack Breakout
1 x SparkFun ProtoShield
1 x Insignia Speakers
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Pitches
#include "pitches.h"
// Mozzi
#include <MozziGuts.h>
// Oscillator
#include <Oscil.h>
// Sine Wave Table For Oscillator
#include <tables/sin2048_int8.h>
// ADSR envelope generator
#include <ADSR.h>
// Simple Keyboard
// Minimum reading of the button that generates a note
const int iKeyboard1 = 1;
const int iKeyboard2 = 2;
const int iKeyboard3 = 3;
const int iKeyboard4 = 4;
const int iKeyboard5 = 5;
const int iKeyboard6 = 6;
const int iKeyboard7 = 7;
const int iKeyboard8 = 8;
const int iKeyboard10 = 10;
const int iKeyboard11 = 11;
const int iKeyboard12 = 12;
const int iKeyboard13 = 13;
// Button is pressed
int iB1 = 1;
int iB2 = 1;
int iB3 = 1;
int iB4 = 1;
int iB5 = 1;
int iB6 = 1;
int iB7 = 1;
int iB8 = 1;
int iB10 = 1;
int iB11 = 1;
int iB12 = 1;
int iB13 = 1;
// Set the input for the potentiometer for Frequency to analog pin 2
const int potFreq = A2;
int iFreg = 1;
int iNoteA = 0;
int iNoteAS = 0;
int iNoteB = 0;
int iNoteC = 0;
int iNoteCS = 0;
int iNoteD = 0;
int iNoteDS = 0;
int iNoteE = 0;
int iNoteF = 0;
int iNoteFS = 0;
int iNoteG = 0;
int iNoteGS = 0;
// Potentiometer
int iPot3 = A3;
int iPot4 = A4;
//Oscillator Functions declared for output envelope 1
// Sine Wave
Oscil <2048, AUDIO_RATE> aSin1(SIN2048_DATA);
// ADSR declaration/definition
// Comment out to use control rate of 128
#define CONTROL_RATE 128
ADSR <CONTROL_RATE, CONTROL_RATE> envelope1;
// Set the input for the potentiometer Attack to analog pin 1
const int potAttack = A0;
// Attack
int attack_level = 0;
int iAttack = 0;
// Set the input for the potentiometer for Decay to analog pin 2
const int potDecay = A1;
// Decay
int decay_level = 0;
int iDecay = 0;
// Software Version Information
String sver = "22-11";
void loop() {
// Audio Hook
audioHook();
}
getKeyboard.ino
// getKeyboard
// setupKeyboard
void setupKeyboard() {
// Initialize the button pin as an input
pinMode(iKeyboard1, INPUT_PULLUP);
pinMode(iKeyboard2, INPUT_PULLUP);
pinMode(iKeyboard3, INPUT_PULLUP);
pinMode(iKeyboard4, INPUT_PULLUP);
pinMode(iKeyboard5, INPUT_PULLUP);
pinMode(iKeyboard6, INPUT_PULLUP);
pinMode(iKeyboard7, INPUT_PULLUP);
pinMode(iKeyboard8, INPUT_PULLUP);
pinMode(iKeyboard10, INPUT_PULLUP);
pinMode(iKeyboard11, INPUT_PULLUP);
pinMode(iKeyboard12, INPUT_PULLUP);
pinMode(iKeyboard13, INPUT_PULLUP);
}
// isKeyboard
void isKeyboard() {
// Choose envelope levels
// attack_level
iAttack = mozziAnalogRead( potAttack );
attack_level = map( iAttack, 0, 1023, 100, 400);
// Attack Level
envelope1.setAttackLevel( attack_level );
// decay_level
iDecay = mozziAnalogRead( potDecay );
decay_level = map( iDecay, 0, 1023, 50, 255);
// Decay Level
envelope1.setDecayLevel( decay_level );
// Read the state of the button value 1
if ( digitalRead(iKeyboard1) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 1
iB1 = iB1 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aSin1.setFreq(iNoteA);
}
else
{
iB1 = iB1 - 1;
}
// Read the state of the button value 2
if ( digitalRead(iKeyboard2) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 2
iB2 = iB2 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aSin1.setFreq(iNoteAS);
}
else
{
iB2 = iB2 - 1;
}
// Read the state of the button value 3
if ( digitalRead(iKeyboard3) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 3
iB3 = iB3 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aSin1.setFreq(iNoteB);
}
else
{
iB3 = iB3 - 1;
}
// Read the state of the button value 4
if ( digitalRead(iKeyboard4) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 4
iB4 = iB4 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aSin1.setFreq(iNoteC);
}
else
{
iB4 = iB4 - 1;
}
// Read the state of the button value 5
if ( digitalRead(iKeyboard5) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 5
iB5 = iB5 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aSin1.setFreq(iNoteCS);
}
else
{
iB5 = iB5 - 1;
}
// Read the state of the button value 6
if ( digitalRead(iKeyboard6) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 6
iB6 = iB6 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aSin1.setFreq(iNoteD);
}
else
{
iB6 = iB6 - 1;
}
// Read the state of the button value 7
if ( digitalRead(iKeyboard7) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 7
iB7 = iB7 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aSin1.setFreq(iNoteDS);
}
else
{
iB7 = iB7 - 1;
}
// Read the state of the button value 8
if ( digitalRead(iKeyboard8) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 8
iB8 = iB8 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aSin1.setFreq(iNoteE);
}
else
{
iB8 = iB8 - 1;
}
// Read the state of the button value 10
if ( digitalRead(iKeyboard10) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 10
iB10 = iB10 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aSin1.setFreq(iNoteF);
}
else
{
iB10 = iB10 - 1;
}
// Read the state of the button value 11
if ( digitalRead(iKeyboard11) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 11
iB11 = iB11 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aSin1.setFreq(iNoteFS);
}
else
{
iB11 = iB11 - 1;
}
// Read the state of the button value 12
if ( digitalRead(iKeyboard12) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 12
iB12 = iB12 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aSin1.setFreq(iNoteG);
}
else
{
iB12 = iB12 - 1;
}
// Read the state of the button value 13
if ( digitalRead(iKeyboard13) == HIGH ) {
// Button is pressed - pullup keeps pin high normally 13
iB13 = iB13 + 1;
// ADSR declaration/definition
envelope1.noteOn();
aSin1.setFreq(iNoteGS);
}
else
{
iB13 = iB13 - 1;
}
}
getMozzi.ino
// Mozzi
// Update Control
void updateControl(){
// Frequency
isPitches();
// Keyboard
isKeyboard();
}
// Update Audio
int updateAudio()
{
// Update Audio
// ADSR declaration/definition
envelope1.update();
// >>8 for AUDIO_MODE STANDARD
return (int) (envelope1.next() * aSin1.next())>>8;
}
getPitches.ino
// Pitches
// isPitches
void isPitches(){
// Frequency
// Value is 0-1023
iFreg = mozziAnalogRead(potFreq);
iFreg = map(iFreg, 0, 1023, 2, 6);
// Range Frequency Note Low => High
switch ( iFreg ) {
case 1:
// NOTE A1
iNoteA = NOTE_A1;
iNoteAS = NOTE_AS1;
iNoteB = NOTE_B1;
iNoteC = NOTE_C2;
iNoteCS = NOTE_CS2;
iNoteD = NOTE_D2;
iNoteDS = NOTE_DS2;
iNoteE = NOTE_E2;
iNoteF = NOTE_F2;
iNoteFS = NOTE_FS2;
iNoteG = NOTE_G2;
iNoteGS = NOTE_GS2;
break;
case 2:
// NOTE A2
iNoteA = NOTE_A2;
iNoteAS = NOTE_AS2;
iNoteB = NOTE_B2;
iNoteC = NOTE_C3;
iNoteCS = NOTE_CS3;
iNoteD = NOTE_D3;
iNoteDS = NOTE_DS3;
iNoteE = NOTE_E3;
iNoteF = NOTE_F3;
iNoteFS = NOTE_FS3;
iNoteG = NOTE_G3;
iNoteGS = NOTE_GS3;
break;
case 3:
// NOTE A3
iNoteA = NOTE_A3;
iNoteAS = NOTE_AS3;
iNoteB = NOTE_B3;
iNoteC = NOTE_C4;
iNoteD = NOTE_D4;
iNoteDS = NOTE_DS4;
iNoteE = NOTE_E4;
iNoteF = NOTE_F4;
iNoteFS = NOTE_FS4;
iNoteG = NOTE_G4;
iNoteGS = NOTE_GS4;
break;
case 4:
// NOTE A4
iNoteA = NOTE_A4;
iNoteAS = NOTE_AS4;
iNoteB = NOTE_B4;
iNoteC = NOTE_C5;
iNoteCS = NOTE_CS5;
iNoteD = NOTE_D5;
iNoteE = NOTE_E5;
iNoteF = NOTE_F5;
iNoteFS = NOTE_FS5;
iNoteG = NOTE_G5;
iNoteGS = NOTE_GS5;
break;
case 5:
// NOTE A5
iNoteA = NOTE_A5;
iNoteAS = NOTE_AS5;
iNoteB = NOTE_B5;
iNoteC = NOTE_C6;
iNoteCS = NOTE_CS6;
iNoteD = NOTE_D6;
iNoteDS = NOTE_DS6;
iNoteE = NOTE_E6;
iNoteF = NOTE_F6;
iNoteFS = NOTE_FS6;
iNoteG = NOTE_G6;
iNoteGS = NOTE_GS6;
break;
case 6:
// NOTE A6
iNoteA = NOTE_A6;
iNoteAS = NOTE_AS6;
iNoteB = NOTE_B6;
iNoteC = NOTE_C7;
iNoteCS = NOTE_CS7;
iNoteD = NOTE_D7;
iNoteDS = NOTE_DS7;
iNoteE = NOTE_E7;
iNoteF = NOTE_F7;
iNoteFS = NOTE_FS7;
iNoteG = NOTE_G7;
iNoteGS = NOTE_GS7;
break;
}
}
pitches.h
/***************************************************************** * Pitches NOTE_B0 <=> NOTE_DS8 - NOTE_A4 is "A" measured at 440Hz *****************************************************************/ #define NOTE_B0 31 #define NOTE_C1 33 #define NOTE_CS1 35 #define NOTE_D1 37 #define NOTE_DS1 39 #define NOTE_E1 41 #define NOTE_F1 44 #define NOTE_FS1 46 #define NOTE_G1 49 #define NOTE_GS1 52 #define NOTE_A1 55 #define NOTE_AS1 58 #define NOTE_B1 62 #define NOTE_C2 65 #define NOTE_CS2 69 #define NOTE_D2 73 #define NOTE_DS2 78 #define NOTE_E2 82 #define NOTE_F2 87 #define NOTE_FS2 93 #define NOTE_G2 98 #define NOTE_GS2 104 #define NOTE_A2 110 #define NOTE_AS2 117 #define NOTE_B2 123 #define NOTE_C3 131 #define NOTE_CS3 139 #define NOTE_D3 147 #define NOTE_DS3 156 #define NOTE_E3 165 #define NOTE_F3 175 #define NOTE_FS3 185 #define NOTE_G3 196 #define NOTE_GS3 208 #define NOTE_A3 220 #define NOTE_AS3 233 #define NOTE_B3 247 #define NOTE_C4 262 #define NOTE_CS4 277 #define NOTE_D4 294 #define NOTE_DS4 311 #define NOTE_E4 330 #define NOTE_F4 349 #define NOTE_FS4 370 #define NOTE_G4 392 #define NOTE_GS4 415 #define NOTE_A4 440 #define NOTE_AS4 466 #define NOTE_B4 494 #define NOTE_C5 523 #define NOTE_CS5 554 #define NOTE_D5 587 #define NOTE_DS5 622 #define NOTE_E5 659 #define NOTE_F5 698 #define NOTE_FS5 740 #define NOTE_G5 784 #define NOTE_GS5 831 #define NOTE_A5 880 #define NOTE_AS5 932 #define NOTE_B5 988 #define NOTE_C6 1047 #define NOTE_CS6 1109 #define NOTE_D6 1175 #define NOTE_DS6 1245 #define NOTE_E6 1319 #define NOTE_F6 1397 #define NOTE_FS6 1480 #define NOTE_G6 1568 #define NOTE_GS6 1661 #define NOTE_A6 1760 #define NOTE_AS6 1865 #define NOTE_B6 1976 #define NOTE_C7 2093 #define NOTE_CS7 2217 #define NOTE_D7 2349 #define NOTE_DS7 2489 #define NOTE_E7 2637 #define NOTE_F7 2794 #define NOTE_FS7 2960 #define NOTE_G7 3136 #define NOTE_GS7 3322 #define NOTE_A7 3520 #define NOTE_AS7 3729 #define NOTE_B7 3951 #define NOTE_C8 4186 #define NOTE_CS8 4435 #define NOTE_D8 4699 #define NOTE_DS8 4978
setup.ino
// Setup
void setup() {
// Setup Keyboard
setupKeyboard();
// Mozzi Start
startMozzi( CONTROL_RATE );
// Sets Attack and Decay Levels; assumes Sustain, Decay, and Idle times
envelope1.setADLevels(200,200);
// Sets Decay time in milliseconds
envelope1.setDecayTime(200);
// Sustain Time setting for envelope1
envelope1.setSustainTime(52500);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc