——
#donluc #sound #simplekeyboard #synthesizer #programming #arduino #fritzing #electronics #microcontrollers #consultant #vlog
——
——
——
——
Waveform
In acoustics the waveform of a signal is the shape of its graph as a function of time, independent of its time and magnitude scales and of any displacement in time. In acoustics, it is usually applied to steady periodic sounds—variations of pressure in air or other media. In these cases, the waveform is an attribute that is independent of the frequency, amplitude, or phase shift of the signal. The term can also be used for non-periodic signals, like chirps and pulses. There are certain wave types that are historically used in electronic music, known as classic waveforms: sine, sawtooth, square, and triangle. These are the four waveforms generated by the classic Moog synthesizer oscillators, and are still quite useful in computer music.
Sine Wave
To the human ear, a sound that is made of more than one sine wave will have perceptible harmonics; addition of different sine waves results in a different waveform and thus changes the timbre of the sound. Presence of higher harmonics in addition to the fundamental causes variation in the timbre, which is the reason why the same musical note played on different instruments sounds different.
Synthesizer
A synthesizer is an electronic musical instrument that generates audio signals. Synthesizers generate audio through methods including subtractive synthesis, additive synthesis, and frequency modulation synthesis. These sounds may be shaped and modulated by components such as filters, envelopes, and low-frequency oscillators. Synthesizers are typically played with keyboards.
Simple keyboard in Arduino is a single-oscillator digital synthesizer generates a square wave tone(). But this simply a square wave and so it sounds rather boring. With a simple trick we can generate any waveform with an Arduino, and with this even imitate musical instruments. The adsr object provides a signal in the shape of an ADSR envelope (attack, decay, sustain, release) commonly used in synthesizer design. You specify an attack time in ms, a decay time in ms, a sustain level, and a release time in ms. Arduino waveform sine wave!
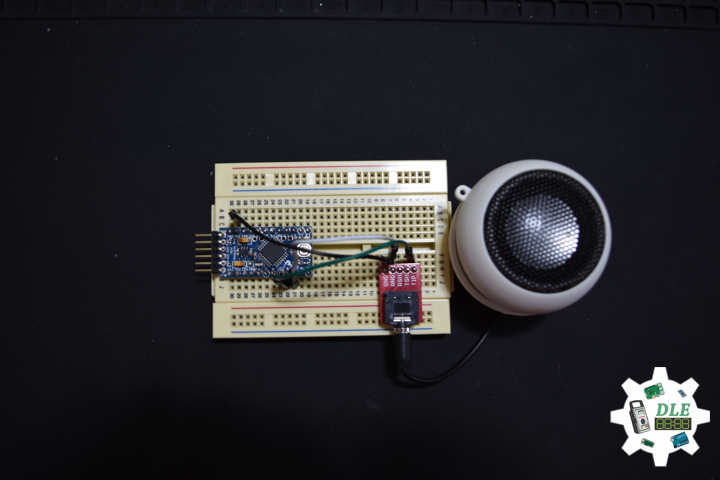
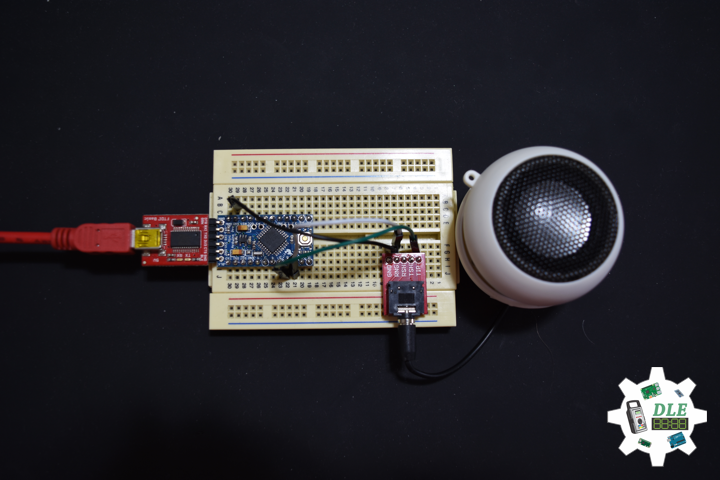
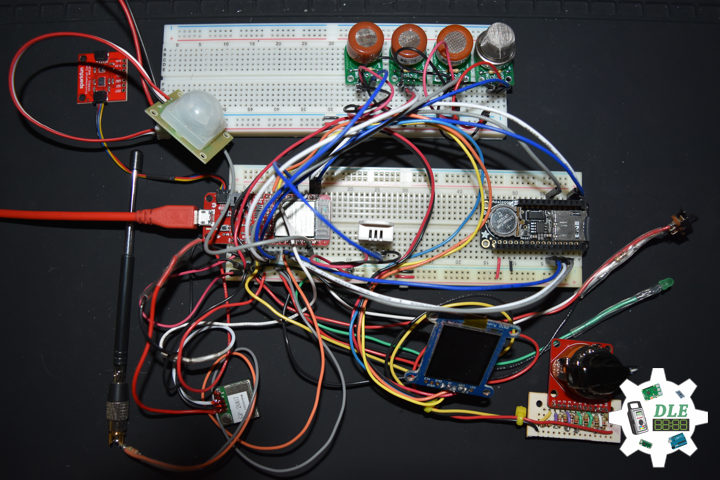
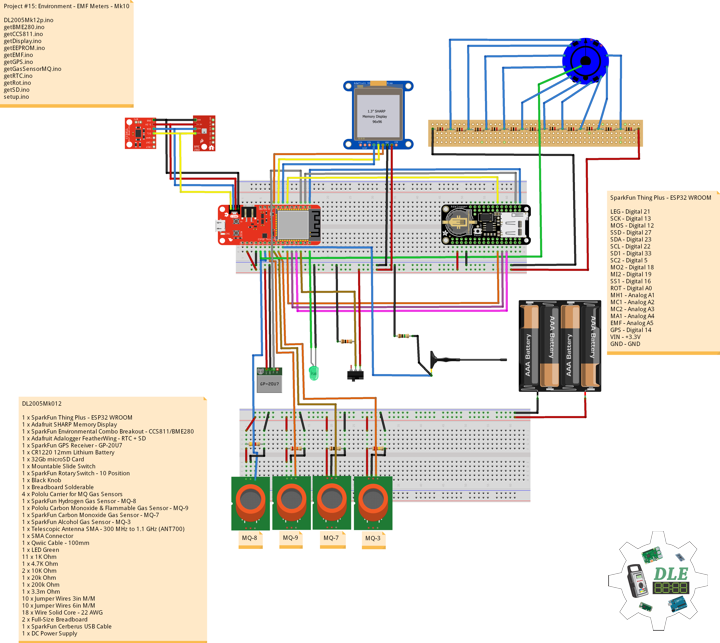
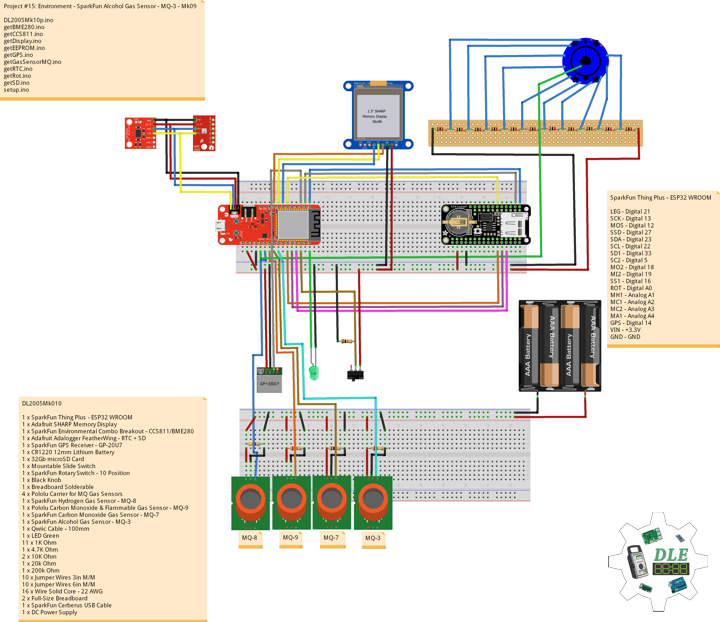
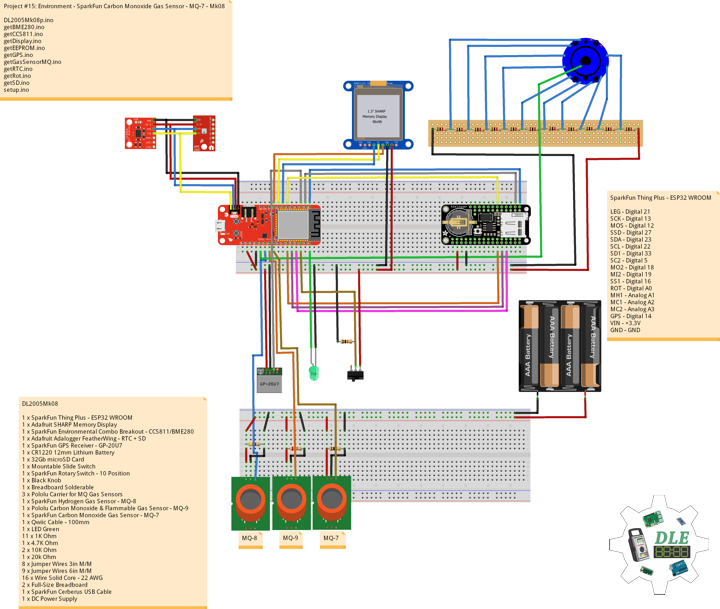
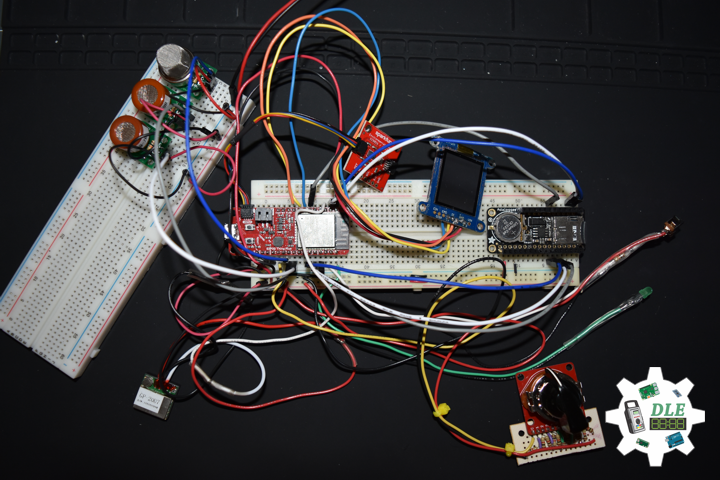
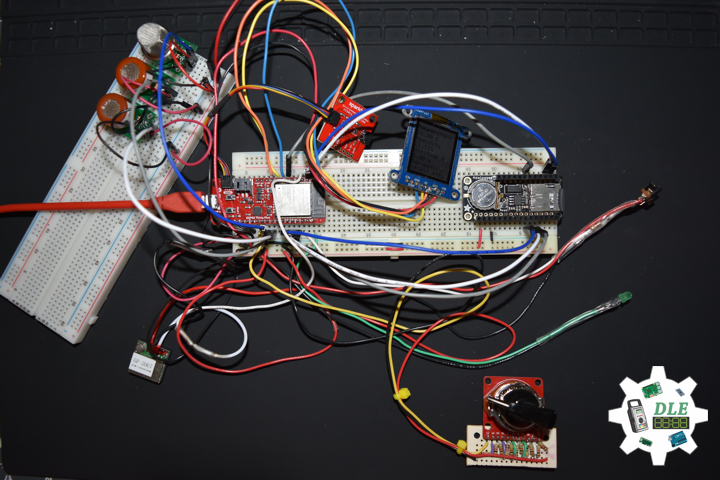
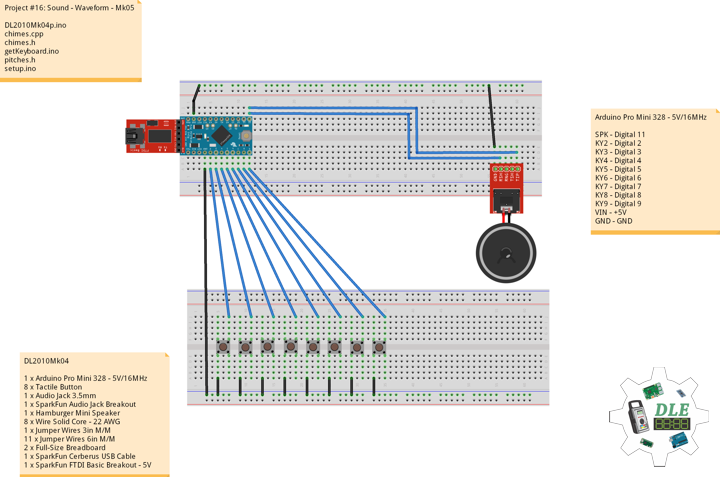
DL2010Mk04
1 x Arduino Pro Mini 328 – 5V/16MHz
8 x Tactile Button
1 x Audio Jack 3.5mm
1 x SparkFun Audio Jack Breakout
1 x Hamburger Mini Speaker
8 x Wire Solid Core – 22 AWG
1 x Jumper Wires 3in M/M
11 x Jumper Wires 6in M/M
2 x Full-Size Breadboard
1 x SparkFun Cerberus USB Cable
1 x SparkFun FTDI Basic Breakout – 5V
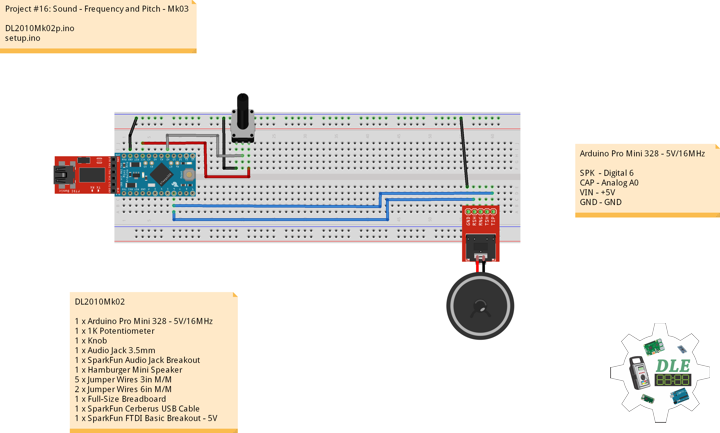
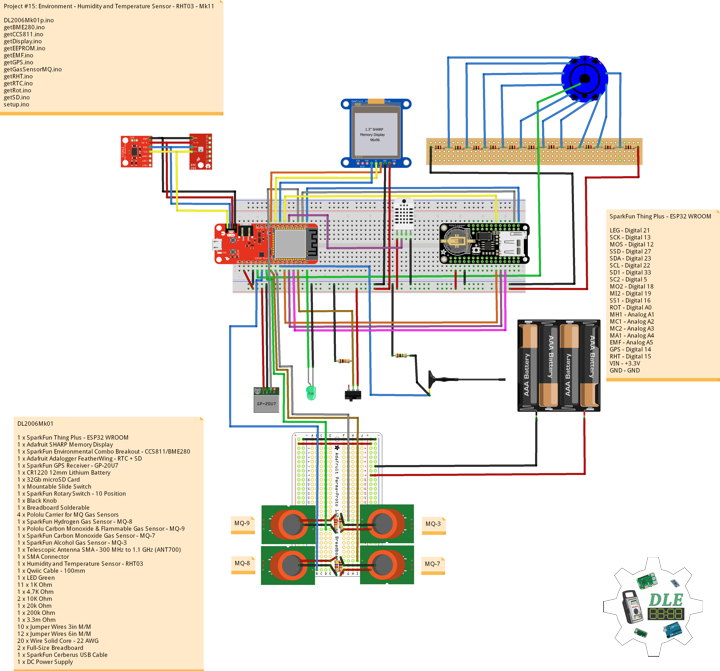
Arduino Pro Mini 328 – 5V/16MHz
SPK – Digital 11
KY2 – Digital 2
KY3 – Digital 3
KY4 – Digital 4
KY5 – Digital 5
KY6 – Digital 6
KY7 – Digital 7
KY8 – Digital 8
KY9 – Digital 9
VIN – +5V
GND – GND
DL2010Mk04p.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #16: Sound - Waveform - Mk05
// 10-04
// DL2010Mk04p.ino 16-05
// 1 x Arduino Pro Mini 328 - 5V/16MHz
// 8 x Tactile Button
// 1 x Audio Jack 3.5mm
// 1 x SparkFun Audio Jack Breakout
// 1 x Hamburger Mini Speaker
// 8 x Wire Solid Core - 22 AWG
// 1 x Jumper Wires 3in M/M
// 11 x Jumper Wires 6in M/M
// 2 x Full-Size Breadboard
// 1 x SparkFun Cerberus USB Cable
// 1 x SparkFun FTDI Basic Breakout - 5V
// Include the Library Code
// Pitches
#include "pitches.h"
// Waveform - Chimes
#include "chimes.h"
using namespace Chimes;
// Sum of ADSR values must not exceed 100%
uint8_t envelope[] = {
0, // Attack[%]
20, // Decay[%]
0, // Sustain[%]
80, // Release[%]
16 // Sustain Level 1..32
};
// Simple Keyboard
// Minimum reading of the button that generates a note
const int iKeyboard2 = 2;
const int iKeyboard3 = 3;
const int iKeyboard4 = 4;
const int iKeyboard5 = 5;
const int iKeyboard6 = 6;
const int iKeyboard7 = 7;
const int iKeyboard8 = 8;
const int iKeyboard9 = 9;
// Button is pressed
int aa = 1;
int bb = 1;
int cc = 1;
int dd = 1;
int ee = 1;
int ff = 1;
int gg = 1;
int hh = 1;
// Software Version Information
String sver = "16-05";
void loop() {
// Keyboard
isKeyboard();
}
chimes.cpp
/*This work is licensed under the Creative Commons Attribution-ShareAlike 4.0 International License. To view a copy of this license, visit https://creativecommons.org/licenses/by-sa/4.0/deed.en */ #include#include "chimes.h" #define ISR_CYCLE 16 //16s char strbuf[255]; uint16_t ADSR_default[] = {0, 0, 100, 0, MAX_VOLUME}; uint16_t ADSR_env[5]; uint16_t nSamples; //Number of samples in Array uint8_t adsrPhase; uint32_t tPeriod; uint8_t *samples; //Array with samples uint8_t *_envelope, _waveform, _duty_cycle; uint16_t &_sustain_lvl = ADSR_env[4]; enum ADSR_phase { ATTACK, DECAY, SUSTAIN, RELEASE }; namespace Chimes { void init(uint8_t waveform, uint8_t duty_cycle, uint8_t *envelope) { Serial.begin(115200); //PWM Signal generation DDRB |= (1 << PB3) + (1 << PB0); //OC2A, Pin 11 TCCR2A = (1 << WGM21) + (1 << WGM20); //Fast PWM TCCR2A |= (0 << COM2A0) + (1 << COM2A1); //Set OC2A on compare match, clear OC2A at BOTTOM,(inverting mode). TCCR2B = (0 << CS22) + (0 << CS21) + (1 << CS20); //No Prescaling samples = (uint8_t *)malloc(0); _waveform = waveform; _duty_cycle = duty_cycle; _envelope = envelope; } void play(uint16_t freq, uint16_t duration) { uint8_t waveform = _waveform; //Init adsr according to the length of the note for (int i = 0; i < 4; i++) { if (_envelope) { ADSR_env[i] = (uint32_t)_envelope[i] * duration / 100; } else { ADSR_env[i] = (uint32_t)ADSR_default[i] * duration / 100; } //Serial.println(ADSR_env[i]); } ADSR_env[4] = _envelope ? _envelope[4] : MAX_VOLUME; //Serial.println(ADSR_env[4]); if (freq == 0) { //Pause tPeriod = ISR_CYCLE * 100; waveform = PAUSE; } else tPeriod = 1E6 / freq; nSamples = tPeriod / ISR_CYCLE; realloc(samples, nSamples); uint16_t nDuty = (_duty_cycle * nSamples) / 100; switch (waveform) { case SINE: //Sinewave for (int i = 0; i < nSamples; i++) { samples[i] = 128 + 127 * sin(2 * PI * i / nSamples); } break; case TRI: //Triangle for (int16_t i = 0; i < nSamples; i++) { if (i < nDuty) { samples[i] = 255 * (double)i / nDuty; //Rise } else { samples[i] = 255 * (1 - (double)(i - nDuty) / (nSamples - nDuty)); //Fall } } break; case RECT: //Rectangle for (int16_t i = 0; i < nSamples; i++) { i < nDuty ? samples[i] = 255 : samples[i] = 0; } break; case PAUSE: //Rectangle memset(samples, 0, nSamples); } TIMSK2 = (1 << TOIE2); /*for(uint16_t i = 0; i < nSamples; i++) { sprintf(strbuf, "%d: %d", i, samples[i]); Serial.println(strbuf); }*/ } //Returns true, while note is playing boolean isPlaying() { return (1 << TOIE2) & TIMSK2; } } // namespace Chimes //Called every 16s, when TIMER1 overflows ISR(TIMER2_OVF_vect) { static uint32_t adsr_timer, adsr_time; static uint16_t cnt; //Index counter static uint8_t sustain_lvl, vol; //Set OCR2A to the next value in sample array, this will change the duty cycle accordingly OCR2A = vol * samples[cnt] / MAX_VOLUME; if (cnt < nSamples - 1) { cnt++; } else { cnt = 0; adsr_timer += tPeriod; if (adsr_timer >= 10000) { //every 10 millisecond adsr_timer = 0; switch (adsrPhase) { case ATTACK: if (ADSR_env[ATTACK]) { vol = MAX_VOLUME * (float)adsr_time / ADSR_env[ATTACK]; if (vol == MAX_VOLUME) { //Attack phase over adsrPhase = DECAY; adsr_time = 0; } } else { adsrPhase = DECAY; vol = MAX_VOLUME; adsr_time = 0; } break; case DECAY: if (ADSR_env[DECAY]) { sustain_lvl = _sustain_lvl; vol = MAX_VOLUME - (MAX_VOLUME - _sustain_lvl) * (float)adsr_time / ADSR_env[DECAY]; if (vol <= sustain_lvl) { adsr_time = 0; adsrPhase = SUSTAIN; } } else { adsrPhase = SUSTAIN; sustain_lvl = MAX_VOLUME; adsr_time = 0; } break; case SUSTAIN: if (adsr_time > ADSR_env[SUSTAIN]) { adsrPhase = RELEASE; adsr_time = 0; } break; case RELEASE: if (ADSR_env[RELEASE]) { vol = sustain_lvl * (1 - (float)adsr_time / ADSR_env[RELEASE]); if (vol == 0) { //Attack phase over adsr_time = 0; TIMSK2 = (0 << TOIE2); adsrPhase = ATTACK; } } else { adsrPhase = ATTACK; vol = 0; adsr_time = 0; TIMSK2 = (0 << TOIE2); } break; } adsr_time += 10; } } }
chimes.h
/*This work is licensed under the Creative Commons Attribution-ShareAlike 4.0 International License.
To view a copy of this license, visit https://creativecommons.org/licenses/by-sa/4.0/deed.en */
#ifndef CHIMES_H
#define CHIMES_H
#include "Arduino.h"
enum waveform
{
SINE, //Sinus
RECT, //Triangle
TRI, //Rectangle
PAUSE //Internal, do not use
};
#define MAX_VOLUME 32
namespace Chimes
{
void init(uint8_t waveform = SINE, uint8_t duty_cycle = 50, uint8_t *envelope = NULL);
void play(uint16_t freq, uint16_t duration);
//Returns true while note is playing
boolean isPlaying();
} // namespace Chimes
#endif
getKeyboard.ino
// getKeyboard
// setupKeyboard
void setupKeyboard() {
// Initialize the pushbutton pin as an input
pinMode(iKeyboard2, INPUT_PULLUP);
pinMode(iKeyboard3, INPUT_PULLUP);
pinMode(iKeyboard4, INPUT_PULLUP);
pinMode(iKeyboard5, INPUT_PULLUP);
pinMode(iKeyboard6, INPUT_PULLUP);
pinMode(iKeyboard7, INPUT_PULLUP);
pinMode(iKeyboard8, INPUT_PULLUP);
pinMode(iKeyboard9, INPUT_PULLUP);
}
// isKeyboard
void isKeyboard() {
// Read the state of the pushbutton value
if ( digitalRead(iKeyboard2) == LOW ) {
// Button is pressed - pullup keeps pin high normally
aa = aa + 1;
// Waveform
isPlaying();
play(NOTE_A4, 1000);
}
else
{
aa = aa - 1;
}
// Read the state of the pushbutton value
if ( digitalRead(iKeyboard3) == LOW ) {
// Button is pressed - pullup keeps pin high normally
bb = bb + 1;
// Waveform
isPlaying();
play(NOTE_B4, 1000);
}
else
{
bb = bb - 1;
}
// Read the state of the pushbutton value
if ( digitalRead(iKeyboard4) == LOW ) {
// Button is pressed - pullup keeps pin high normally
cc = cc + 1;
// Waveform
isPlaying();
play(NOTE_C5, 1000);
}
else
{
cc = cc - 1;
}
// Read the state of the pushbutton value
if ( digitalRead(iKeyboard5) == LOW ) {
// Button is pressed - pullup keeps pin high normally
dd = dd + 1;
// Waveform
isPlaying();
play(NOTE_D5, 1000);
}
else
{
dd = dd - 1;
}
// Read the state of the pushbutton value
if ( digitalRead(iKeyboard6) == LOW ) {
// Button is pressed - pullup keeps pin high normally
ee = ee + 1;
// Waveform
isPlaying();
play(NOTE_E5, 1000);
}
else
{
ee = ee - 1;
}
// Read the state of the pushbutton value
if ( digitalRead(iKeyboard7) == LOW ) {
// Button is pressed - pullup keeps pin high normally
ff = ff + 1;
// Waveform
isPlaying();
play(NOTE_F5, 1000);
}
else
{
ff = ff - 1;
}
// Read the state of the pushbutton value
if ( digitalRead(iKeyboard8) == LOW ) {
// Button is pressed - pullup keeps pin high normally
gg = gg + 1;
// Waveform
isPlaying();
play(NOTE_G5, 1000);
}
else
{
gg = gg - 1;
}
// Read the state of the pushbutton value
if ( digitalRead(iKeyboard9) == LOW ) {
// Button is pressed - pullup keeps pin high normally
hh = hh + 1;
// Waveform
isPlaying();
play(NOTE_A5, 1000);
}
else
{
hh = hh - 1;
}
// Waveform
isPlaying();
play(0, 50);
}
pitches.h
/***************************************************************** * Pitches NOTE_B0 <=> NOTE_DS8 - NOTE_A4 is "A" measured at 440Hz *****************************************************************/ #define NOTE_B0 31 #define NOTE_C1 33 #define NOTE_CS1 35 #define NOTE_D1 37 #define NOTE_DS1 39 #define NOTE_E1 41 #define NOTE_F1 44 #define NOTE_FS1 46 #define NOTE_G1 49 #define NOTE_GS1 52 #define NOTE_A1 55 #define NOTE_AS1 58 #define NOTE_B1 62 #define NOTE_C2 65 #define NOTE_CS2 69 #define NOTE_D2 73 #define NOTE_DS2 78 #define NOTE_E2 82 #define NOTE_F2 87 #define NOTE_FS2 93 #define NOTE_G2 98 #define NOTE_GS2 104 #define NOTE_A2 110 #define NOTE_AS2 117 #define NOTE_B2 123 #define NOTE_C3 131 #define NOTE_CS3 139 #define NOTE_D3 147 #define NOTE_DS3 156 #define NOTE_E3 165 #define NOTE_F3 175 #define NOTE_FS3 185 #define NOTE_G3 196 #define NOTE_GS3 208 #define NOTE_A3 220 #define NOTE_AS3 233 #define NOTE_B3 247 #define NOTE_C4 262 #define NOTE_CS4 277 #define NOTE_D4 294 #define NOTE_DS4 311 #define NOTE_E4 330 #define NOTE_F4 349 #define NOTE_FS4 370 #define NOTE_G4 392 #define NOTE_GS4 415 #define NOTE_A4 440 #define NOTE_AS4 466 #define NOTE_B4 494 #define NOTE_C5 523 #define NOTE_CS5 554 #define NOTE_D5 587 #define NOTE_DS5 622 #define NOTE_E5 659 #define NOTE_F5 698 #define NOTE_FS5 740 #define NOTE_G5 784 #define NOTE_GS5 831 #define NOTE_A5 880 #define NOTE_AS5 932 #define NOTE_B5 988 #define NOTE_C6 1047 #define NOTE_CS6 1109 #define NOTE_D6 1175 #define NOTE_DS6 1245 #define NOTE_E6 1319 #define NOTE_F6 1397 #define NOTE_FS6 1480 #define NOTE_G6 1568 #define NOTE_GS6 1661 #define NOTE_A6 1760 #define NOTE_AS6 1865 #define NOTE_B6 1976 #define NOTE_C7 2093 #define NOTE_CS7 2217 #define NOTE_D7 2349 #define NOTE_DS7 2489 #define NOTE_E7 2637 #define NOTE_F7 2794 #define NOTE_FS7 2960 #define NOTE_G7 3136 #define NOTE_GS7 3322 #define NOTE_A7 3520 #define NOTE_AS7 3729 #define NOTE_B7 3951 #define NOTE_C8 4186 #define NOTE_CS8 4435 #define NOTE_D8 4699 #define NOTE_DS8 4978
setup.ino
// Setup
void setup() {
// Setup Keyboard
setupKeyboard();
// Waveform
init(
// SINE, TRI and RECT
SINE,
// Duty cycle 0..100%, only matters for Triangle and Rectangle
50,
// Envelope
envelope);
}
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc...)
- Robotics
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc...)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc...)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc...)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc...)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc...)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc...)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc...)
Instructor
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/luc.paquin/
Don Luc