——
#DonLucElectronics #DonLuc #Robotics #BLE #L298N #MotorDC #ArduinoUNOR4 #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Arduino Bluetooth Low Energy
Bluetooth Low Energy, often referred to as Bluetooth LE, is a wireless communication technology designed for short-range data exchange between electronic devices. It emerged as a response to the need for energy-efficient wireless communication in various applications, especially those where power consumption is a critical concern.
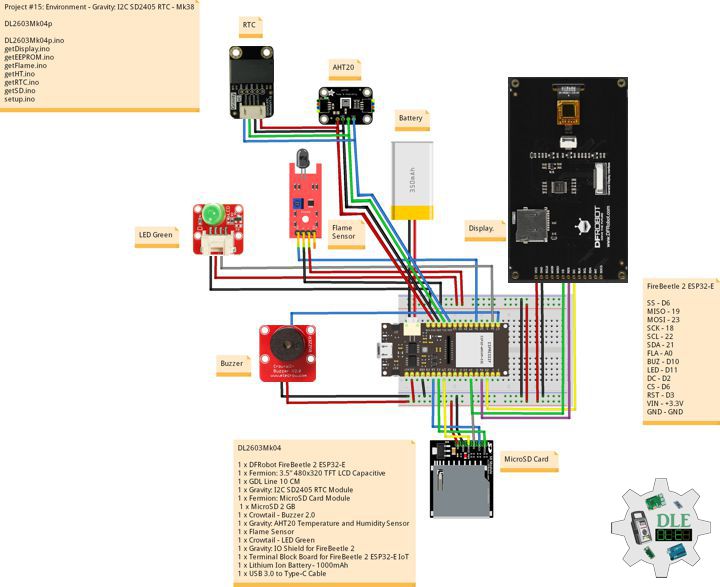
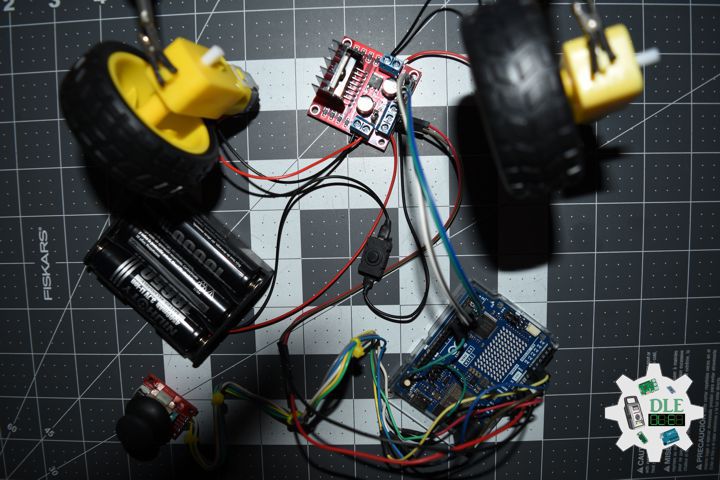
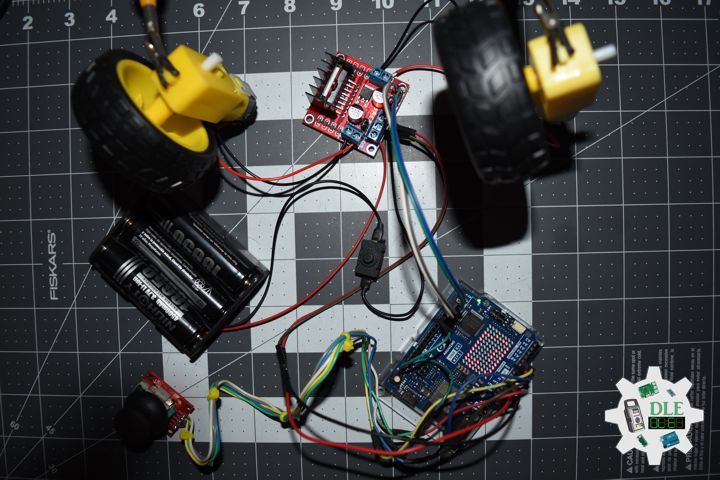
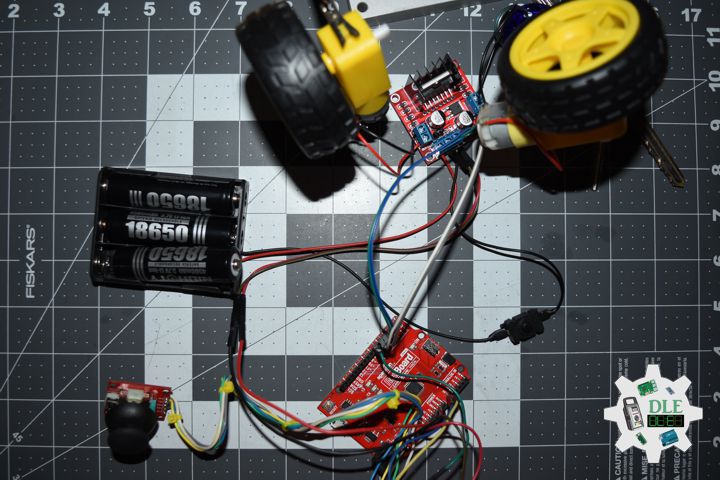
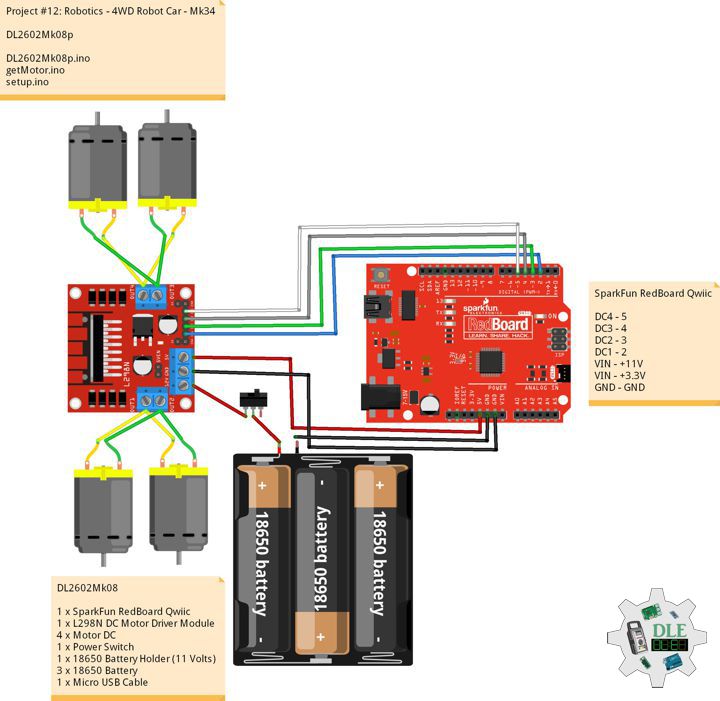
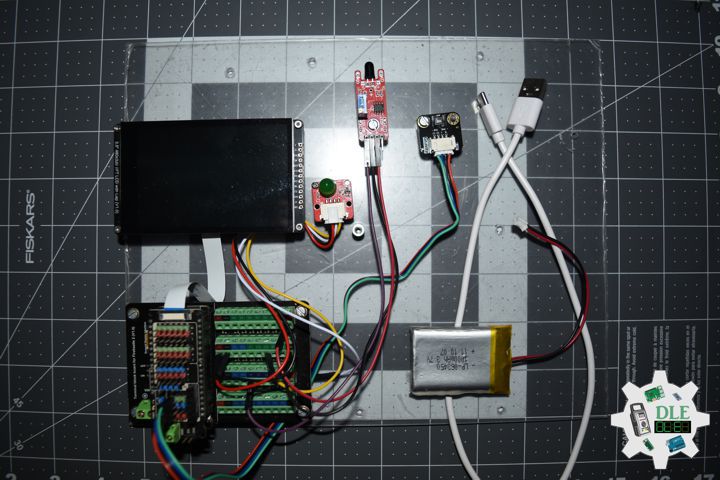
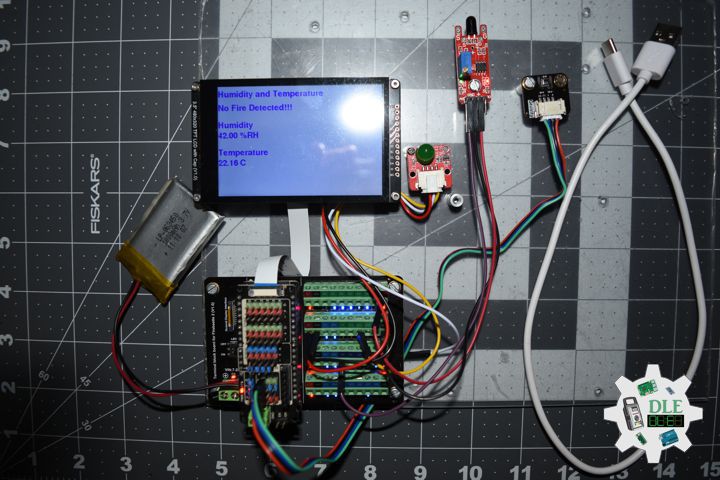
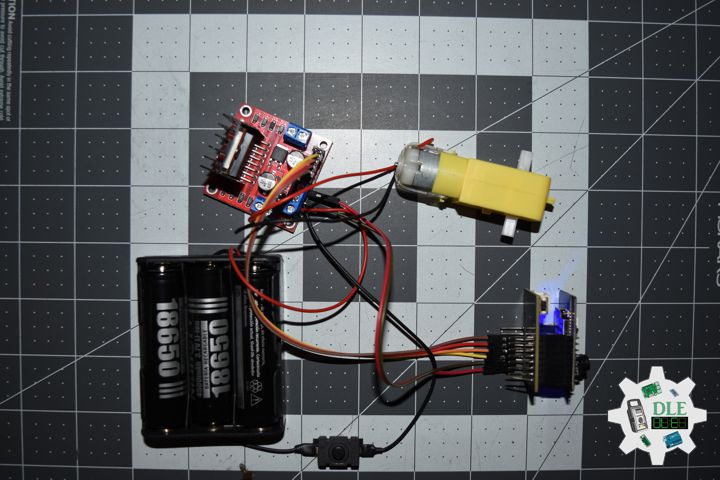
DL2603Mk05
1 x Arduino UNO R4 WiFi
1 x L298N DC Motor Driver Module
2 x Motor DC
1 x Power Switch
1 x 18650 Battery Holder (11 Volts)
3 x 18650 Battery
1 x USB 3.0 to Type-C Cable
DL2603Mk05p
DL2603Mk05p.ino
/****** Don Luc Electronics © ******
Software Version Information
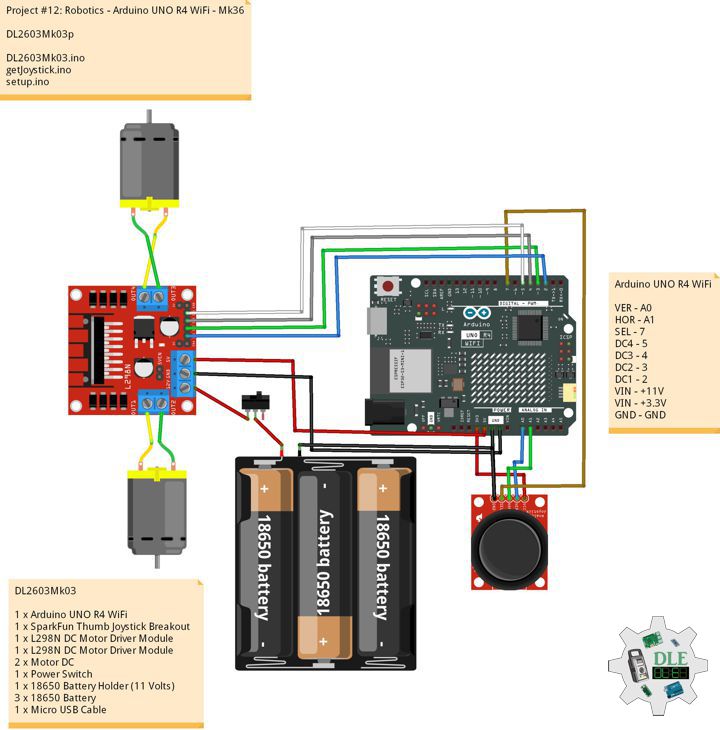
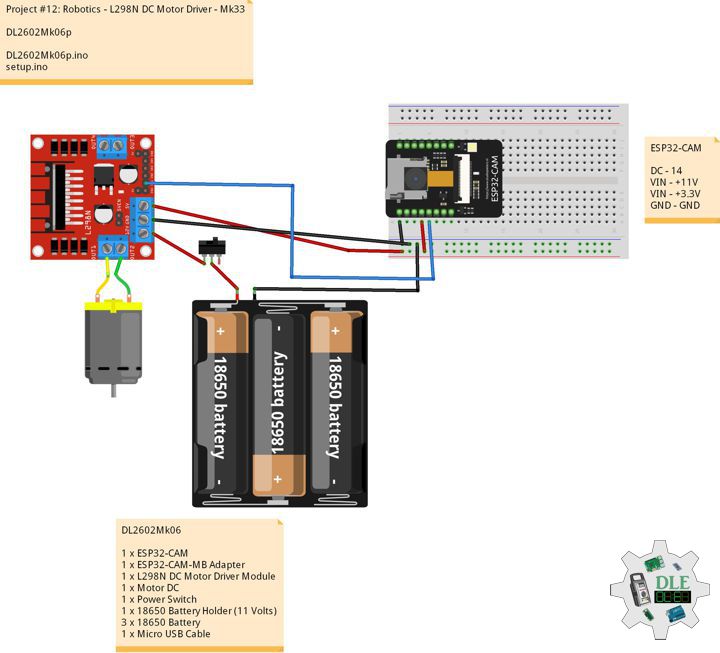
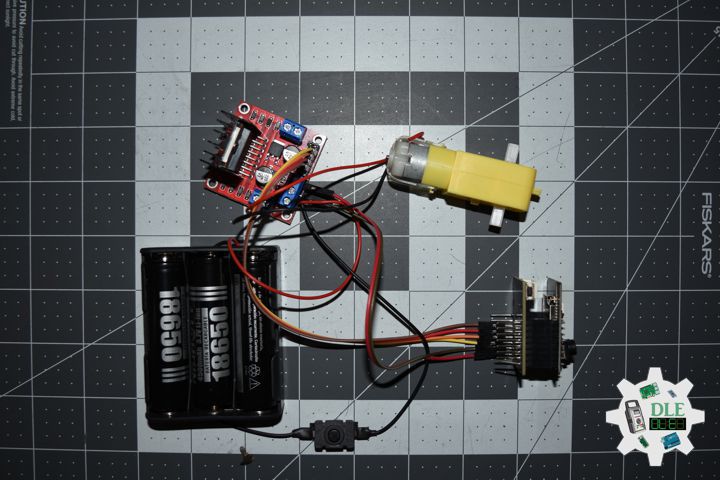
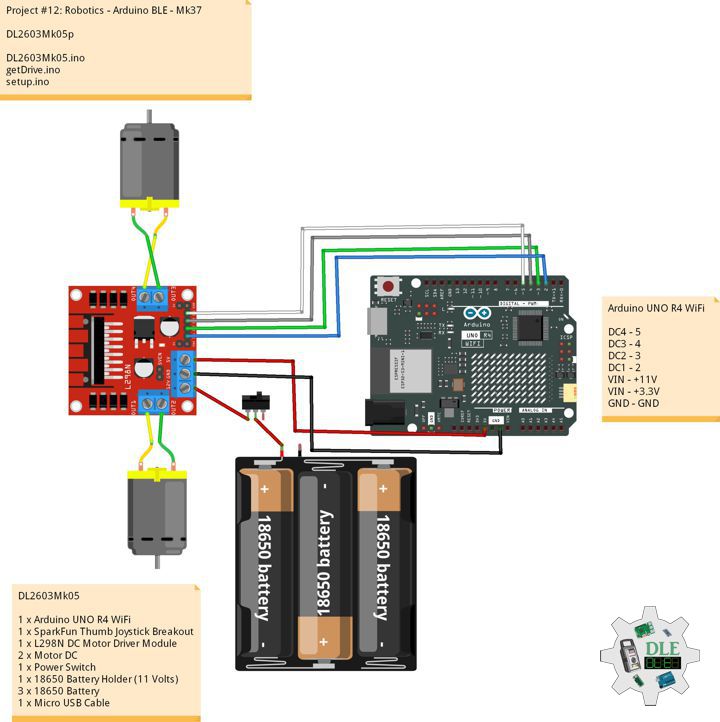
Project #12: Robotics - Arduino BLE - Mk37
12-37
DL2603Mk05p.ino
DL2603Mk05
1 x Arduino UNO R4 WiFi
1 x L298N DC Motor Driver Module
2 x Motor DC
1 x Power Switch
1 x 18650 Battery Holder (11 Volts)
3 x 18650 Battery
1 x Micro USB Cable
*/
// Include the Library Code
// LED_Matrix library
#include "Arduino_LED_Matrix.h"
// Arduino BLE
#include <ArduinoBLE.h>
// Arduino UNO R4 WiFi
// Car Service
BLEService carService("546b10ec-9c23-4f5e-ab33-cd415313439f");
// Command Char
BLECharacteristic commandChar("c607bca7-4832-4032-a0ab-e9c180dcce1e", BLEWrite, 20);
// Create an instance of the ArduinoLEDMatrix class
ArduinoLEDMatrix matrix;
// Motor DC 1
int motor1pin1 = 2;
int motor1pin2 = 3;
// Motor DC 2
int motor2pin1 = 4;
int motor2pin2 = 5;
// CMD
char cmd;
// Software Version Information
String sver = "12-37";
void loop() {
// BLE Device Central
BLEDevice central = BLE.central();
// Central
if (central) {
// Connected
while (central.connected()) {
// Written
if (commandChar.written()) {
// CMD
cmd = commandChar.value()[0];
// Drive
drive(cmd);
}
}
}
}
getDrive.ino
// Drive
void drive(char cmd) {
// Forward
if (cmd == 'F') { forward(); }
// Backward
else if (cmd == 'B') { backward(); }
// Left
else if (cmd == 'L') { left(); }
// Right
else if (cmd == 'R') { right(); }
// Stop
else { stopCar(); }
}
// Forward
void forward() { digitalWrite(motor1pin1, LOW); digitalWrite(motor1pin2, HIGH); digitalWrite(motor2pin1, HIGH); digitalWrite(motor2pin2, LOW); }
// Backward
void backward() { digitalWrite(motor1pin1, HIGH); digitalWrite(motor1pin2, LOW); digitalWrite(motor2pin1, LOW); digitalWrite(motor2pin2,HIGH); }
// Left
void left() { digitalWrite(motor1pin1, LOW); digitalWrite(motor1pin2, HIGH); digitalWrite(motor2pin1, LOW); digitalWrite(motor2pin2, LOW); }
// Right
void right() { digitalWrite(motor1pin1, LOW); digitalWrite(motor1pin2, LOW); digitalWrite(motor2pin1, HIGH); digitalWrite(motor2pin2, LOW); }
// Stop
void stopCar() { digitalWrite(motor1pin1, LOW); digitalWrite(motor1pin2, LOW); digitalWrite(motor2pin1, LOW); digitalWrite(motor2pin2, LOW); }
setup.ino
// Setup
void setup()
{
// Initialize the LED matrix
matrix.begin();
// Load and display the basic emoji frame on the LED matrix
matrix.loadFrame(LEDMATRIX_UNO);
// Motor DC 1
pinMode(motor1pin1, OUTPUT);
pinMode(motor1pin2, OUTPUT);
// Motor DC 2
pinMode(motor2pin1, OUTPUT);
pinMode(motor2pin2, OUTPUT);
// Serial Begin
Serial.begin(9600);
// BLE Begin
if (!BLE.begin()) {
while (1);
}
// Name
BLE.setLocalName("UnoR4Car");
// Advertised Service
BLE.setAdvertisedService(carService);
// Characteristic
carService.addCharacteristic(commandChar);
// Service
BLE.addService(carService);
// Advertise
BLE.advertise();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Consultant, R&D, Electronics, IoT, Teacher and Instructor
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank , Underwater and UAV Vehicle
- Unmanned Vehicles Terrestrial, Marine and UAV
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2026
https://www.donluc.com/luc/LucPaquinCVEng2026Mk01.pdf
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
DFRobot: https://learn.dfrobot.com/user-10186.html
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Hackster: https://www.hackster.io/luc-paquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc