——
#DonLucElectronics #DonLuc #RTC #UNIHIKER #Display #IoT #Project #DFRobot #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——

——
Gravity I2C SD2405 RTC module
We’re glad to introduce a new member in Gravity family: Gravity I2C SD2405 RTC module. This is an extremely accurate I2C Real Time Clock (RTC) with crystal compensation, inner chargeable battery. The SD2405AL is available in industrial temperature ranges.
The SD2405AL is dual power supply system. When the primary power supply goes down to an assigned value or resumes from low power, the system can switch between the primary power supply and battery automatically. Even there is no external power, it can still work for 5~8 years, 1uA ultra-low power consumption (inner battery.
The SD2405AL can generates various periodic interrupt clock pulses lasting for long period, and three alarm interrupts can be made by year, month, date, days of the week, hours, and minutes, seconds. It also provides a selectable 32.768 KHz~1Hz clock output for an external MCU. The product incorporates a time trimming circuit that adjusts the clock with higher precision by adjusting any errors in crystal oscillator frequencies based on signals from the CPU. A 12-bytes general SRAM is implemented in the SD2405AL.
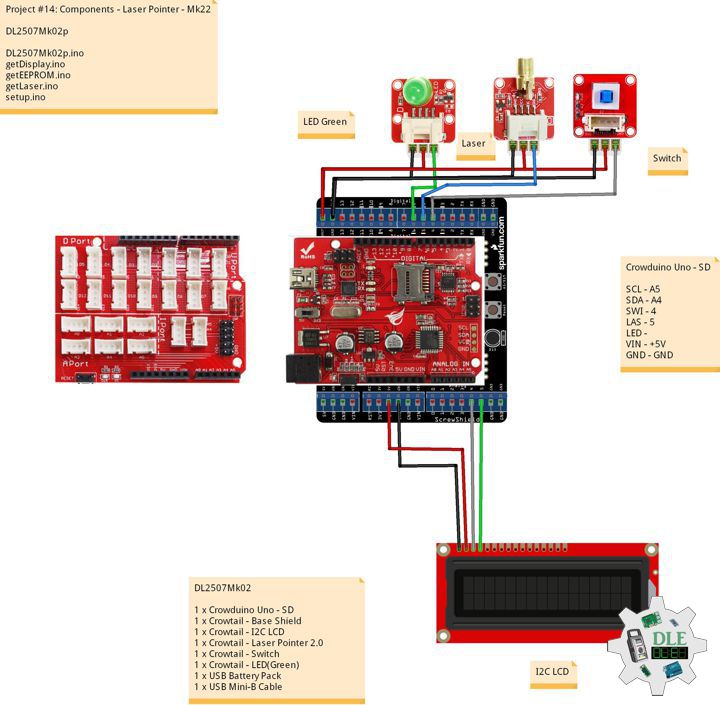
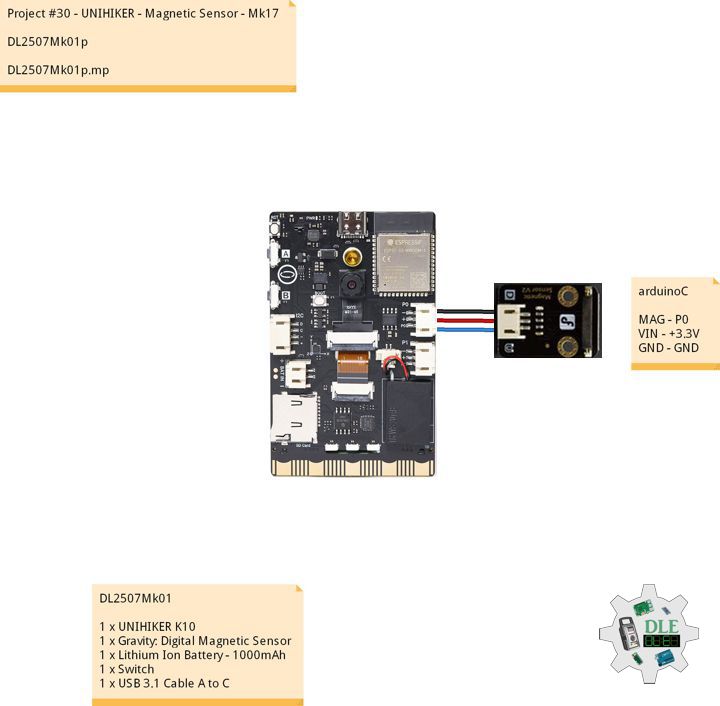
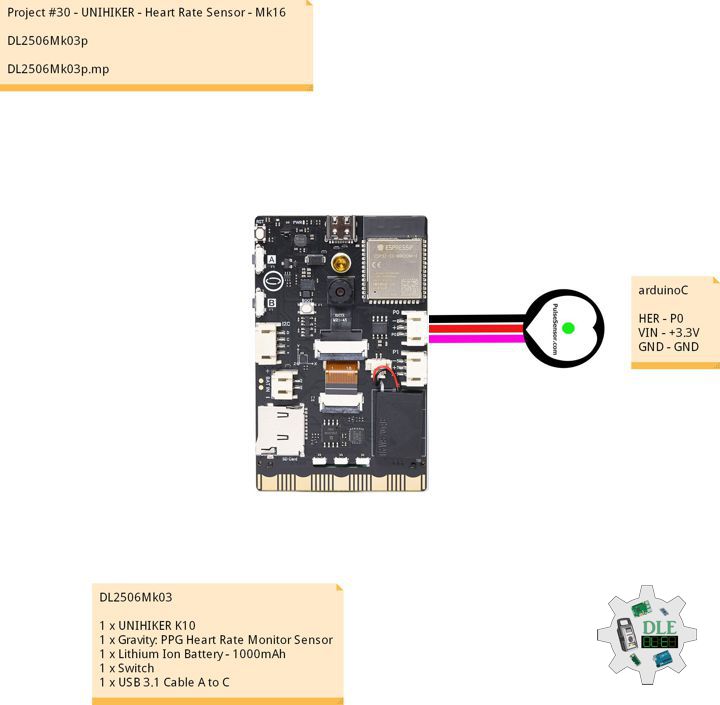
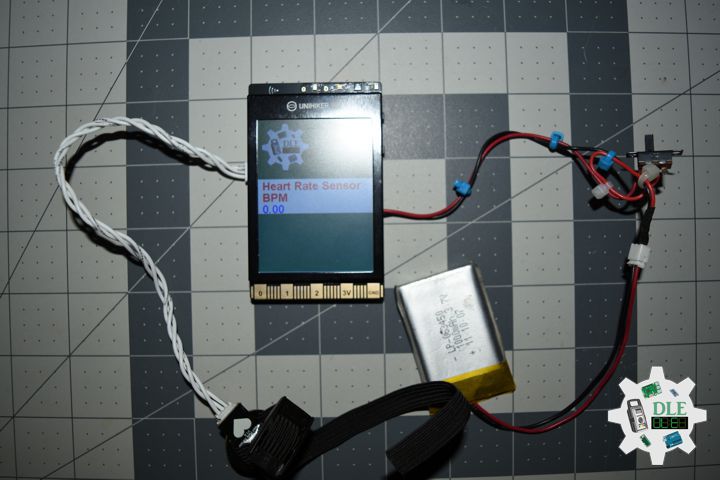
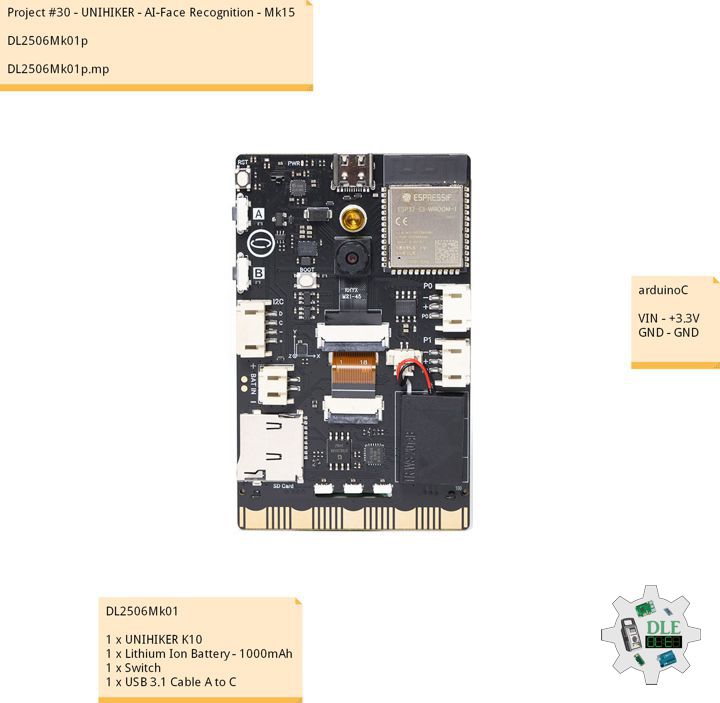
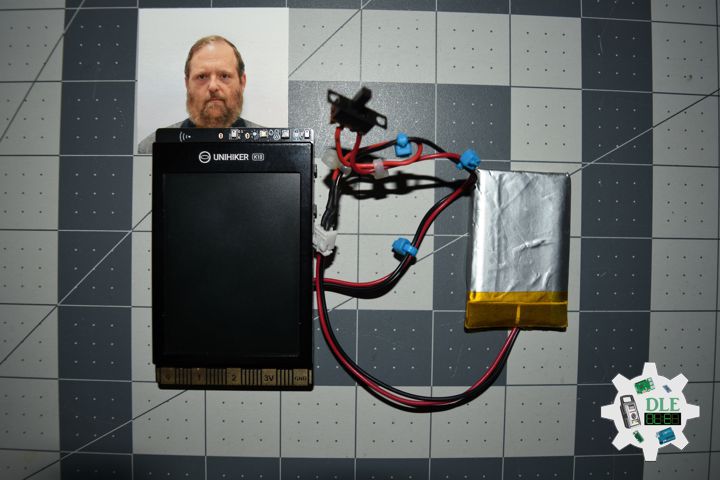
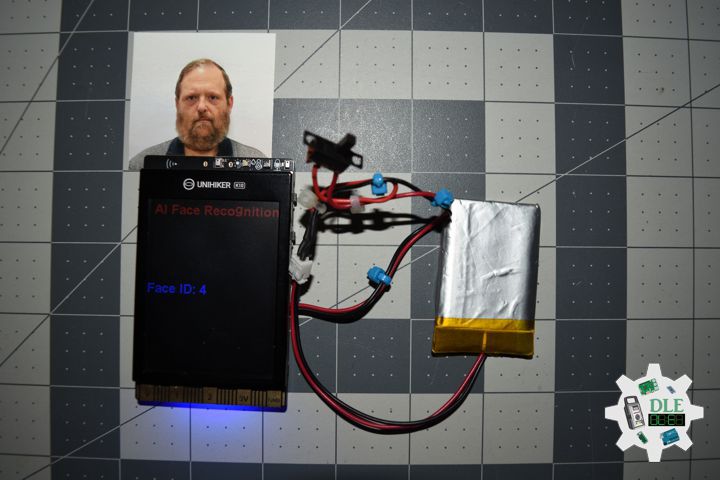
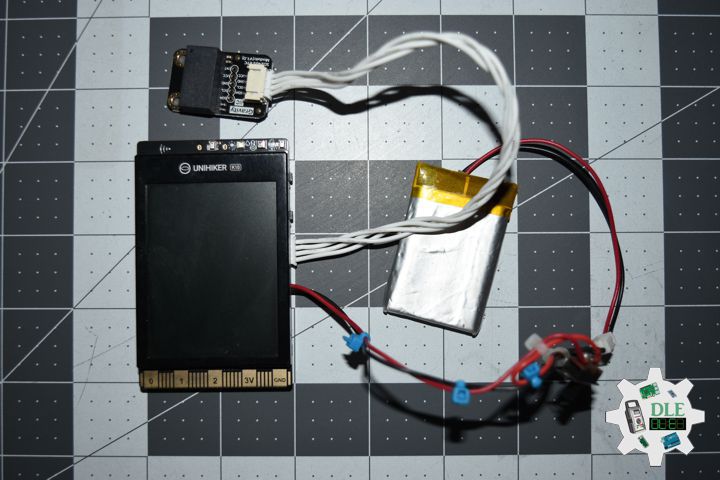
DL2508Mk01
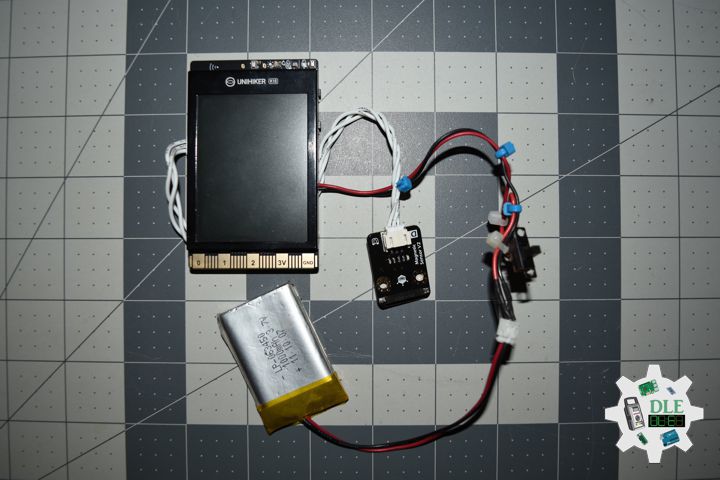
1 x UNIHIKER K10
1 x Gravity I2C SD2405 RTC module
1 x Lithium Ion Battery – 1000mAh
1 x Switch
1 x USB 3.1 Cable A to C
DL2508Mk01p
DL2508Mk01p.mp
/****** Don Luc Electronics © ******
Software Version Information
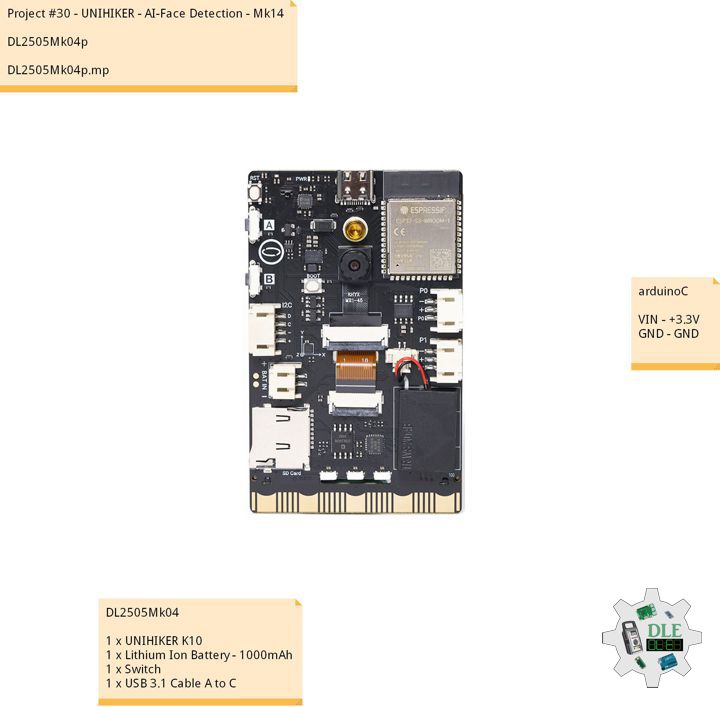
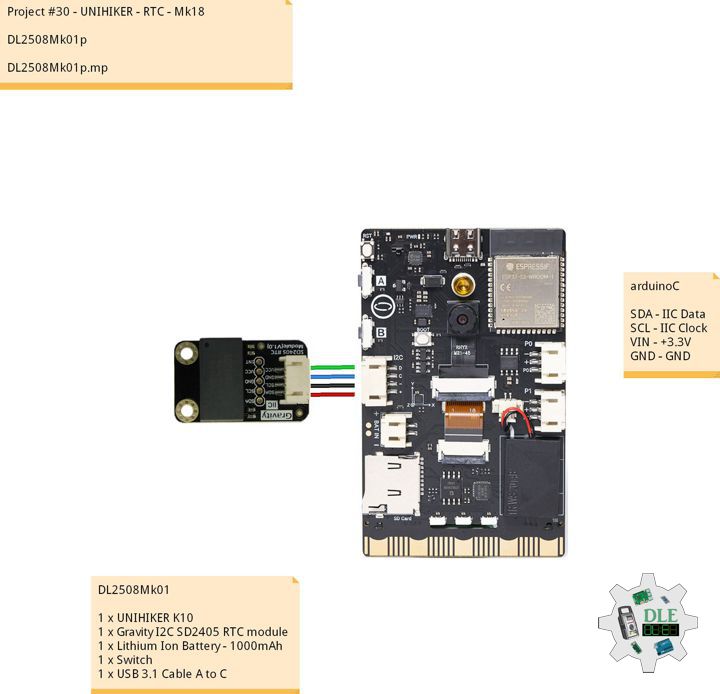
Project #30 - UNIHIKER - RTC - Mk18
DL2508Mk01p.mp
DL2508Mk01
1 x UNIHIKER K10
1 x Gravity I2C SD2405 RTC module
1 x Lithium Ion Battery - 1000mAh
1 x Switch
1 x USB 3.1 Cable A to C
*/
// Include the Library Code
// Unihiker K10
#include "unihiker_k10.h"
// Gravity I2C SD2405 RTC module
DFRobot_DS0469 ds0469;
// Create an object
UNIHIKER_K10 k10;
// Screen
uint8_t screen_dir=2;
// Main program start
void setup() {
// Begin
k10.begin();
// Init Screen
k10.initScreen(screen_dir);
// Canver
k10.creatCanvas();
// Gravity I2C SD2405 RTC module
ds0469.begin();
// Image
k10.canvas->canvasDrawBitmap(0,0,240,320,image_data1);
}
// Loop
void loop() {
// Gravity I2C SD2405 RTC module
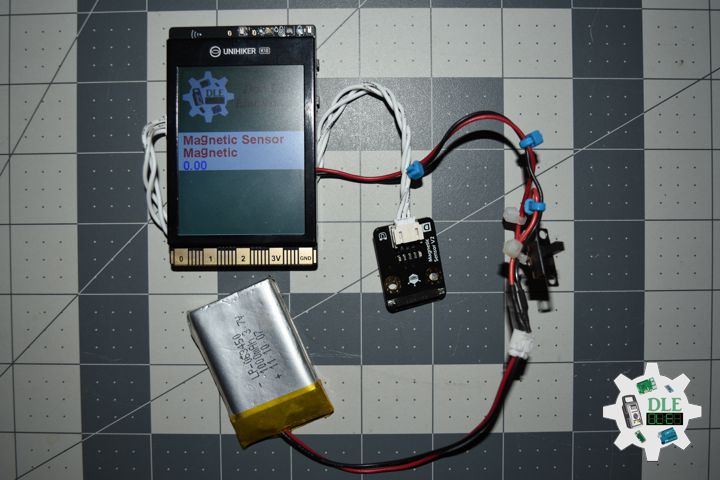
k10.canvas->canvasText("Real Time Clock", 6, 0xFF0000);
// RTC
// Year
k10.canvas->canvasText(ds0469.getTime(ds0469.YEAR), 7, 0x0000FF);
// Month
k10.canvas->canvasText(ds0469.getTime(ds0469.MONTH), 8, 0x0000FF);
// Date
k10.canvas->canvasText(ds0469.getTime(ds0469.DATE), 9, 0x0000FF);
// Hour
k10.canvas->canvasText(ds0469.getTime(ds0469.HOUR), 10, 0x0000FF);
// Minute
k10.canvas->canvasText(ds0469.getTime(ds0469.MINUTE), 11, 0x0000FF);
// Seconds
k10.canvas->canvasText(ds0469.getTime(ds0469.SECONDS), 12, 0x0000FF);
// Update Canvas
k10.canvas->updateCanvas();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Consultant, R&D, Electronics, IoT, Teacher and Instructor
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- Sensors, eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Patreon: https://patreon.com/DonLucElectronics59
DFRobot: https://learn.dfrobot.com/user-10186.html
Hackster.io: https://www.hackster.io/neosteam-labs
Elecrow: https://www.elecrow.com/share/sharepj/center/no/760816d385ebb1edc0732fd873bfbf13
TikTok: https://www.tiktok.com/@luc.paquin8
Twitch: https://www.twitch.tv/lucpaquin
Hackster: https://www.hackster.io/luc-paquin
LinkedIn: https://www.linkedin.com/in/jlucpaquin/
Don Luc