——
#DonLucElectronics #DonLuc #Sound #Arduino #ESP32 #SparkFunThingPlusESP32WROOM #SparkFunQwiicMP3 #DaytonAudioRS75T #Project #Programming #Electronics #Microcontrollers #Consultant #VideoBlog
——
——

——
——

——
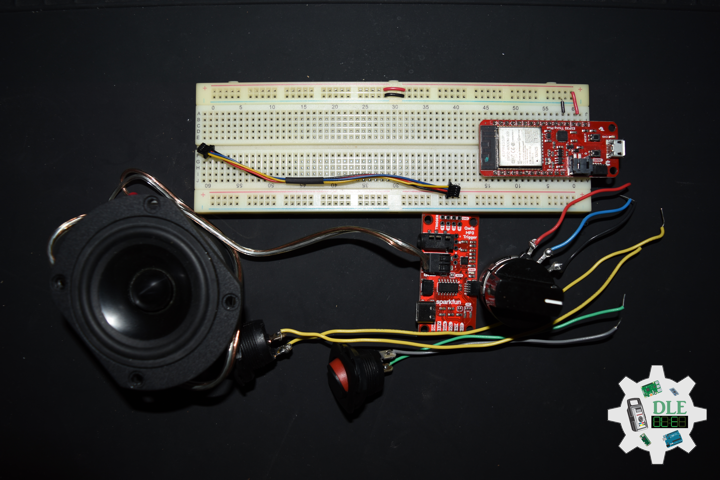
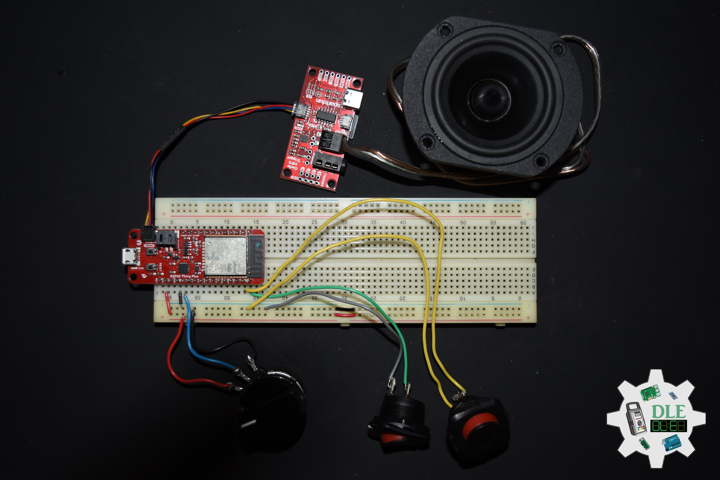
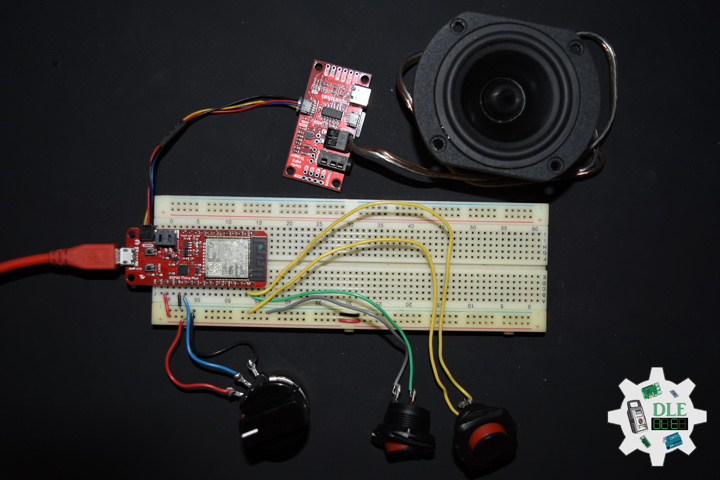
Dayton Audio RS75T-8 3″ Reference Full-Range Driver Truncated Frame
The Dayton Audio Reference Series sets a new standard of value in high-performance loudspeaker drivers. Incorporating a low-distortion motor system with a copper ring, a copper cap, and an aluminum phase plug, the RS75T-8 can outperform “boutique” drivers that cost several times the price. The driver’s truncated frame makes it ideal for line arrays and ultra-compact MTM designs requiring minimal driver-to-driver spacing. Its low-distortion characteristics and smooth response provide exceptional clarity, detail, and dynamics. Features a black anodized cone, heavy-duty 4-hole cast frame, low-loss rubber surround, and gold terminals.
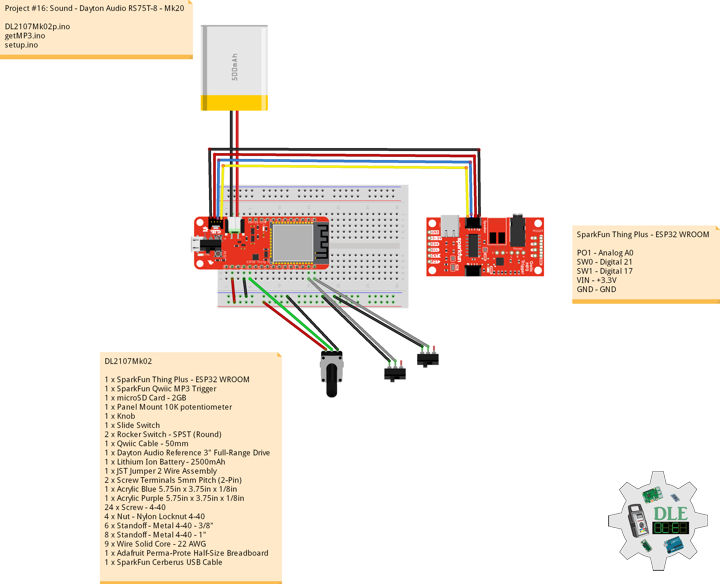
DL2107Mk02
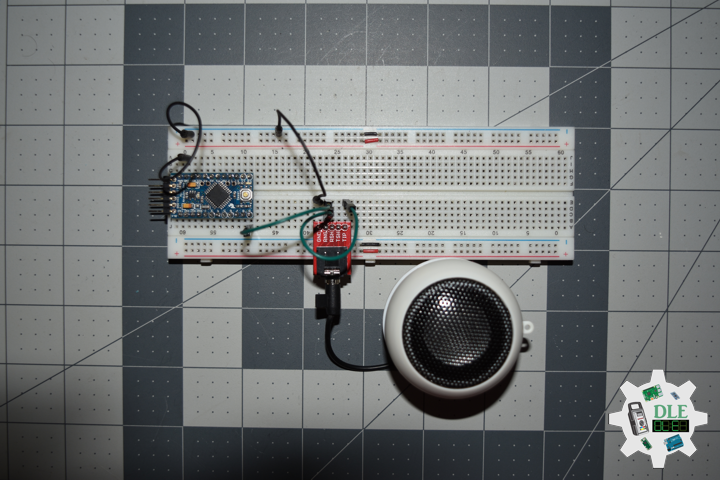
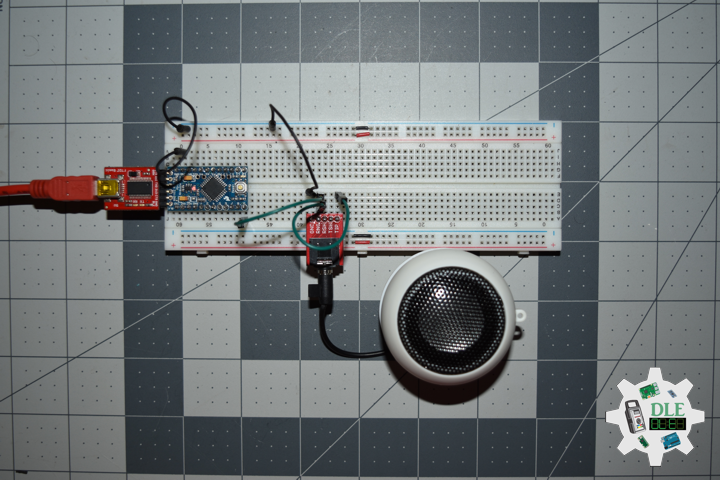
1 x SparkFun Thing Plus – ESP32 WROOM
1 x SparkFun Qwiic MP3 Trigger
1 x microSD Card – 2GB
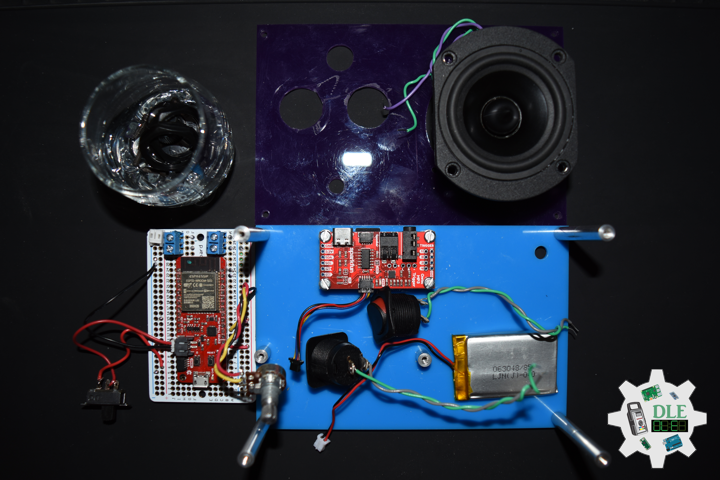
1 x Panel Mount 10K potentiometer
1 x Knob
1 x Slide Switch
2 x Rocker Switch – SPST (Round)
1 x Qwiic Cable – 50mm
1 x Dayton Audio Reference 3″ Full-Range Drive
1 x Lithium Ion Battery – 850mAh
1 x JST Jumper 2 Wire Assembly
2 x Screw Terminals 5mm Pitch (2-Pin)
1 x Acrylic Blue 5.75in x 3.75in x 1/8in
1 x Acrylic Purple 5.75in x 3.75in x 1/8in
24 x Screw – 4-40
4 x Nut – Nylon Locknut 4-40
6 x Standoff – Metal 4-40 – 3/8″
8 x Standoff – Metal 4-40 – 1″
18 x Wire Solid Core – 22 AWG
1 x Adafruit Perma-Prote Half-Size Breadboard
1 x SparkFun Cerberus USB Cable
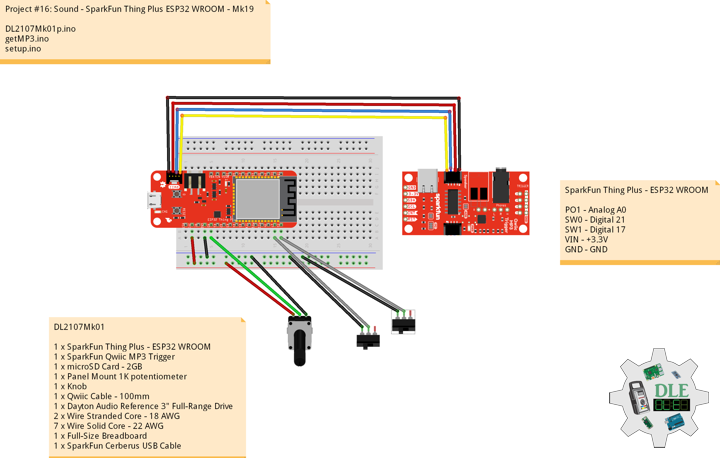
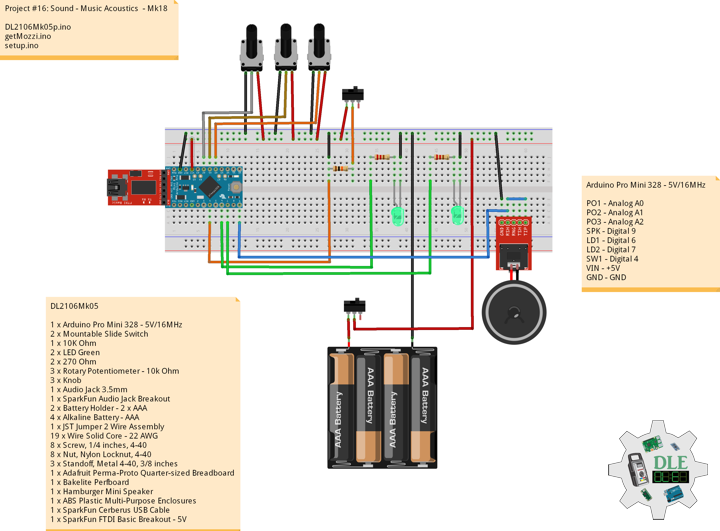
SparkFun Thing Plus – ESP32 WROOM
PO1 – Analog A0
SW0 – Digital 21
SW1 – Digital 17
VIN – +3.3V
GND – GND
DL2107Mk02p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
#16 - Sound - Dayton Audio RS75T-8 - Mk20
07-02
DL2107Mk02p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x SparkFun Qwiic MP3 Trigger
1 x microSD Card - 2GB
1 x Panel Mount 10K potentiometer
1 x Knob
1 x Slide Switch
2 x Rocker Switch - SPST (Round)
1 x Qwiic Cable - 50mm
1 x Dayton Audio Reference 3" Full-Range Drive
1 x Lithium Ion Battery - 850mAh
1 x JST Jumper 2 Wire Assembly
2 x Screw Terminals 5mm Pitch (2-Pin)
1 x Acrylic Blue 5.75in x 3.75in x 1/8in
1 x Acrylic Purple 5.75in x 3.75in x 1/8in
24 x Screw - 4-40
4 x Nut - Nylon Locknut 4-40
6 x Standoff - Metal 4-40 - 3/8"
8 x Standoff - Metal 4-40 - 1"
18 x Wire Solid Core - 22 AWG
1 x Adafruit Perma-Prote Half-Size Breadboard
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Wire communicate with I2C / TWI devices
#include <Wire.h>
// SparkFun MP3 Trigger
#include "SparkFun_Qwiic_MP3_Trigger_Arduino_Library.h"
// SparkFun MP3 Trigger
MP3TRIGGER mp3;
int iSongCount = 0;
int x = 0;
// Volume
int iVolume = A0;
int iVolumeLevel = 0;
// EQ Setting Normal
byte bEQSetting = 0;
// Play Next
const int iPlayNext = 21;
// Variable for reading the iPlayNext status
int iPlayNextState = 0;
// Play Previous
const int iPlayPrevious = 17;
// Variable for reading the iPlayPrevious status
int iPlayPreviousState = 0;
// Software Version Information
String sver = "16-20";
void loop()
{
if (mp3.isPlaying() == false) {
if ( x > iSongCount ) {
x = 0;
} else {
x = x + 1;
}
// Play Track
mp3.playTrack( x );
} else {
// Volume
isVolume();
// Play Next
isPlayNext();
// Play Previous
isPlayPrevious();
}
}
getMP3.ino
// MP3
// Setup MP3
void isSetupMP3(){
// Check to see if Qwiic MP3 is present on the bus
if (mp3.begin() == false)
{
// Qwiic MP3 failed to respond. Please check wiring and possibly the I2C address. Freezing...
while (1);
}
if (mp3.hasCard() == false)
{
// Qwiic MP3 is missing its SD card. Freezing...
while (1);
}
// Song Count
iSongCount = mp3.getSongCount();
// EQ Setting Classic
bEQSetting = mp3.getEQ();
// Initialize the iPlayNext
pinMode( iPlayNext, INPUT);
// Initialize the iPlayPrevious
pinMode( iPlayPrevious, INPUT);
}
// Volume
void isVolume() {
// Volume
iVolumeLevel = analogRead( iVolume );
// (0-1023 for 10 bits or 0-4095 for 12 bits)
iVolumeLevel = map(iVolumeLevel, 0, 4095, 0, 31);
// Volume can be 0 (off) to 31 (max)
mp3.setVolume( iVolumeLevel );
}
// Play Next
void isPlayNext() {
// Read the state of the iPlayNext value
iPlayNextState = digitalRead( iPlayNext );
if ( iPlayNextState == HIGH ) {
mp3.stop();
if ( x > iSongCount ) {
x = 0;
} else {
x = x + 1;
}
// Play Track
mp3.playTrack( x );
}
}
// Play Previous
void isPlayPrevious() {
// Read the state of the iPlayPrevious value
iPlayPreviousState = digitalRead( iPlayPrevious );
if ( iPlayPreviousState == HIGH ) {
mp3.stop();
if ( x > iSongCount ) {
x = 0;
} else {
x = x - 1;
}
// Play Track
mp3.playTrack( x );
}
}
setup.ino
// Setup
void setup()
{
// Wire communicate with I2C / TWI devices
Wire.begin();
// SparkFun MP3 Trigger Setup
isSetupMP3();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- Robotics
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2021 English & Español
https://www.jlpconsultants.com/CV/LucPaquinCVEngMk2021c.pdf
https://www.jlpconsultants.com/CV/LucPaquinCVEspMk2021c.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLE/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: https://zoom.us/
Patreon: https://www.patreon.com/DonLucElectronics
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc