——
#DonLucElectronics #DonLuc #Environment #MQ #PIR #RHT03 #ArduinoUNO #Arduino #Project #Programming #Electronics #Microcontrollers #Consultant #VideoBlog
——
——
——
——
——
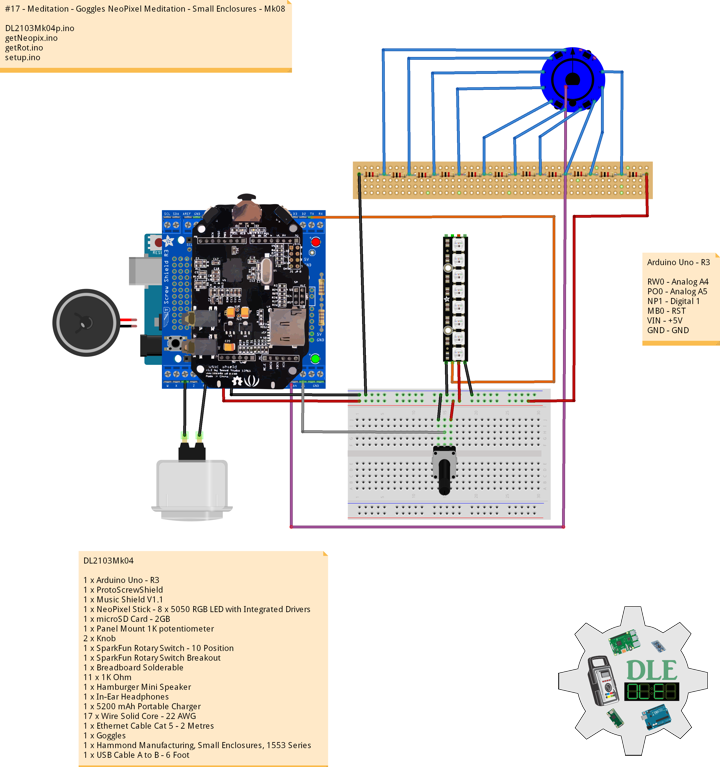
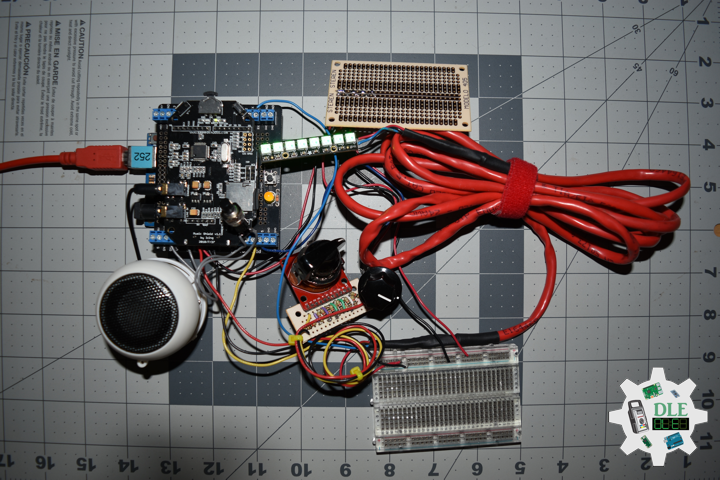
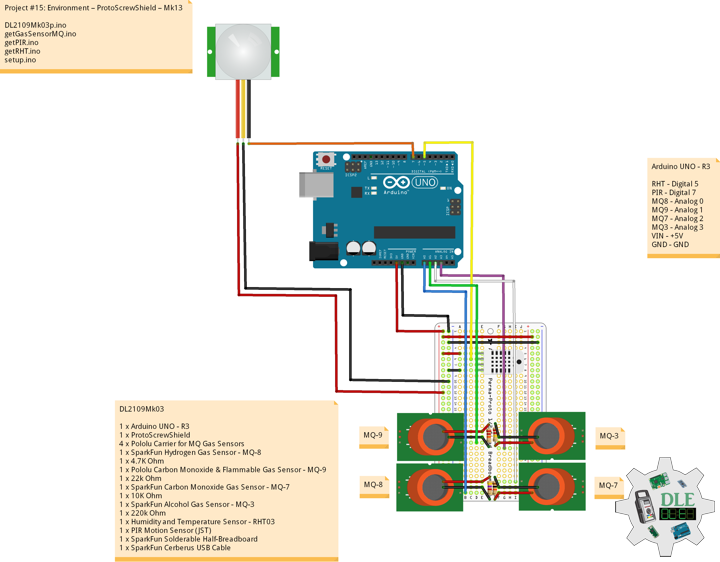
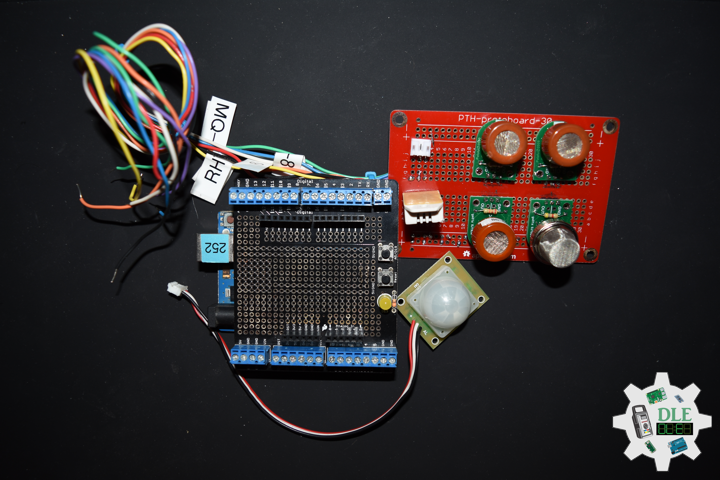
ProtoScrewShield
The ScrewShield extends all pins of the Arduino out to 3.5 mm pitch screw terminals. It also has a lot of the utility provided by Arduino Protoshield, including: a large prototyping space of both connected and unconnected 0.1 inch spaced through-holes, a couple 5V and GND busses, a reset button, general use push button, and a 5 mm yellow LED. This product includes all the parts shown and comes in kit form and must be soldered together by the end user.
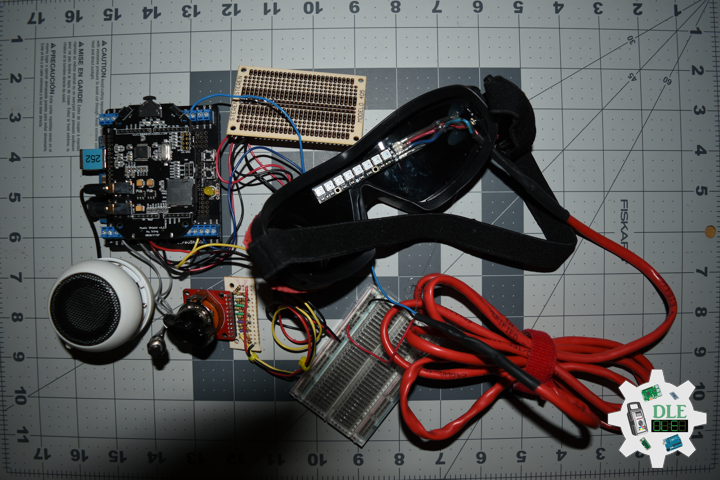
DL2109Mk03
1 x Arduino UNO – R3
1 x ProtoScrewShield
4 x Pololu Carrier for MQ Gas Sensors
1 x SparkFun Hydrogen Gas Sensor – MQ-8
1 x 4.7K Ohm
1 x Pololu Carbon Monoxide & Flammable Gas Sensor – MQ-9
1 x 22k Ohm
1 x SparkFun Carbon Monoxide Gas Sensor – MQ-7
1 x 10K Ohm
1 x SparkFun Alcohol Gas Sensor – MQ-3
1 x 220k Ohm
1 x Temperature and Humidity Sensor- RHT03
1 x PIR Motion Sensor (JST)
1 x SparkFun Solderable Half-Breadboard
1 x SparkFun Cerberus USB Cable
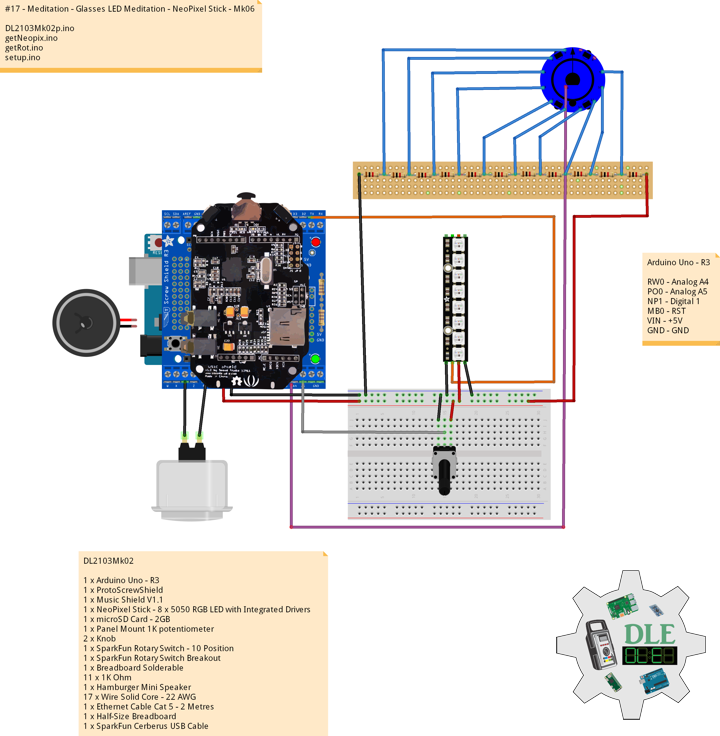
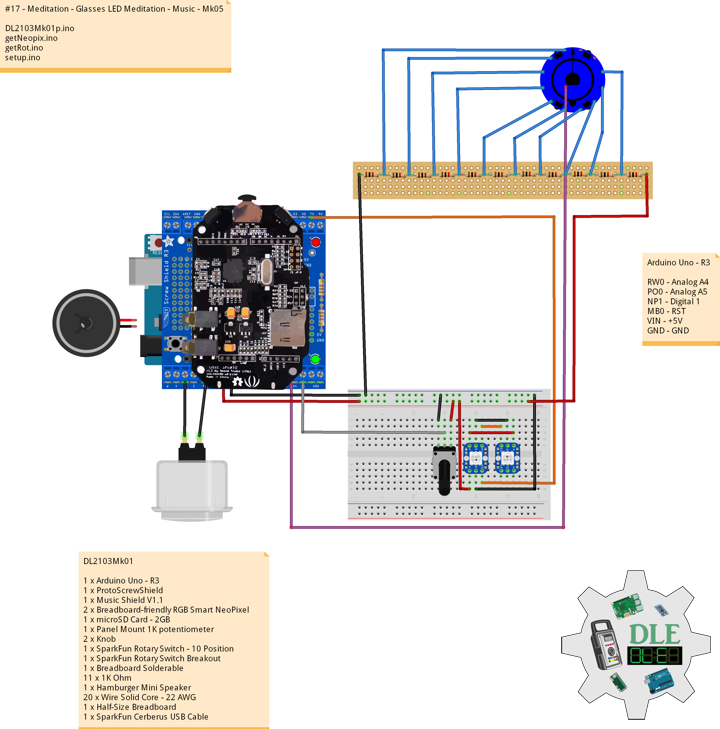
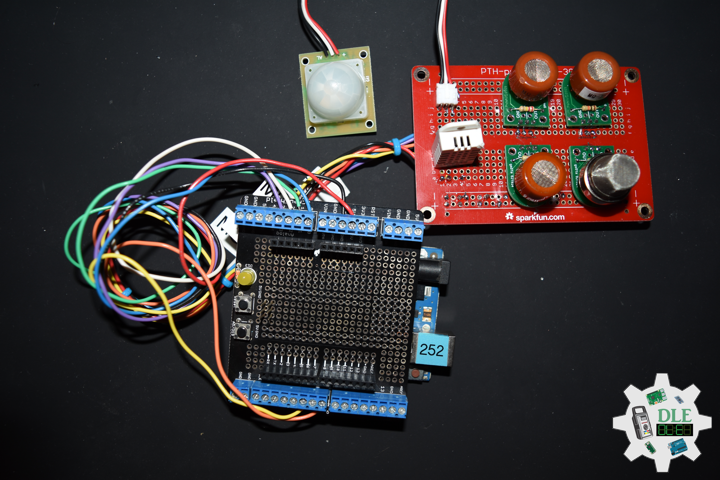
Arduino UNO – R3
RHT – Digital 5
PIR – Digital 7
MQ8 – Analog 0
MQ9 – Analog 1
MQ7 – Analog 2
MQ3 – Analog 3
VIN – +5V
GND – GND
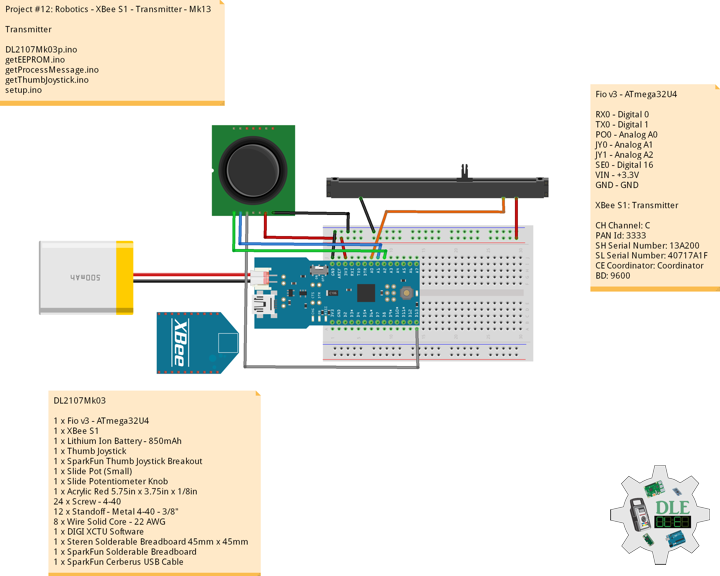
DL2109Mk03p.ino
/*
***** Don Luc Electronics © *****
Software Version Information
Project #15: Environment – ProtoScrewShield – Mk13
09-03
DL2109Mk03p.ino
1 x Arduino UNO - R3
1 x ProtoScrewShield
4 x Pololu Carrier for MQ Gas Sensors
1 x SparkFun Hydrogen Gas Sensor - MQ-8
1 x 4.7K Ohm
1 x Pololu Carbon Monoxide & Flammable Gas Sensor - MQ-9
1 x 22k Ohm
1 x SparkFun Carbon Monoxide Gas Sensor - MQ-7
1 x 10K Ohm
1 x SparkFun Alcohol Gas Sensor - MQ-3
1 x 220k Ohm
1 x Temperature and Humidity Sensor - RHT03
1 x PIR Motion Sensor (JST)
1 x SparkFun Solderable Half-Breadboard
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// EEPROM Library to Read and Write EEPROM with Unique ID for Unit
#include <EEPROM.h>
// RHT Temperature and Humidity Sensor
#include <SparkFun_RHT03.h>
// RHT Temperature and Humidity Sensor
// RHT03 data pin Digital 5
const int RHT03_DATA_PIN = 5;
// This creates a RTH03 object, which we'll use to interact with the sensor
RHT03 rht;
float latestHumidity;
float latestTempC;
float latestTempF;
// Gas Sensors MQ
// Hydrogen Gas Sensor - MQ-8
int iMQ8 = A0;
int iMQ8Raw = 0;
int iMQ8ppm = 0;
// Two points are taken from the curve in datasheet.
// With these two points, a line is formed which is
// "approximately equivalent" to the original curve.
float H2Curve[3] = {2.3, 0.93,-1.44};
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
int iMQ9 = A1;
int iMQ9Raw = 0;
int iMQ9ppm = 0;
// Carbon Monoxide Gas Sensor - MQ-7
int iMQ7 = A2;
int iMQ7Raw = 0;
int iMQ7ppm = 0;
// Alcohol Gas Sensor - MQ-3
int iMQ3 = A3;
int iMQ3Raw = 0;
int iMQ3ppm = 0;
// PIR Motion
// Motion detector
const int iMotion = 7;
// Proximity
int proximity = LOW;
String Det = "";
// Software Version Information
String uid = "";
// Version
String sver = "15-13";
void loop()
{
// RHT Temperature and Humidity Sensor
isRHT03();
// Gas Sensors MQ
isGasSensor();
// isPIR Motion
isPIR();
// Delay
// Turn the LED on HIGH is the voltage level
digitalWrite(LED_BUILTIN, HIGH);
// Wait for a 0.5 second
delay( 500 );
// Turn the LED off by making the voltage LOW
digitalWrite(LED_BUILTIN, LOW);
// Wait for a 0.5 second
delay( 500 );
}
getEEPROM.ino
// EEPROM
// isUID EEPROM Unique ID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getGasSensorMQ.ino
// Gas Sensors MQ
// Gas Sensor
void isGasSensor() {
// Read in analog value from each gas sensors
// Hydrogen Gas Sensor - MQ-8
iMQ8Raw = analogRead( iMQ8 );
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
iMQ9Raw = analogRead( iMQ9 );
// Carbon Monoxide Gas Sensor - MQ-7
iMQ7Raw = analogRead( iMQ7 );
// Alcohol Gas Sensor - MQ-3
iMQ3Raw = analogRead( iMQ3 );
// Caclulate the PPM of each gas sensors
// Hydrogen Gas Sensor - MQ-8
iMQ8ppm = isMQ8( iMQ8Raw );
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
iMQ9ppm = isMQ9( iMQ9Raw );
// Carbon Monoxide Gas Sensor - MQ-7
iMQ7ppm = isMQ7( iMQ7Raw );
// Alcohol Gas Sensor - MQ-3
iMQ3ppm = isMQ3( iMQ3Raw );
// Serial
// Hydrogen Gas Sensor - MQ-8
Serial.print( "MQ-8: " );
Serial.println( iMQ8ppm );
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
Serial.print( "MQ-9: " );
Serial.println( iMQ9ppm );
// Carbon Monoxide Gas Sensor - MQ-7
Serial.print( "MQ-7: " );
Serial.println( iMQ7ppm );
// Alcohol Gas Sensor - MQ-3
Serial.print( "MQ-3: " );
Serial.println( iMQ3ppm );
}
// Hydrogen Gas Sensor - MQ-8 - PPM
int isMQ8(double rawValue) {
// RvRo
double RvRo = rawValue * (3.3 / 1023);
return (pow(4.7,( ((log(RvRo)-H2Curve[1])/H2Curve[2]) + H2Curve[0])));
}
// Carbon Monoxide & Flammable Gas Sensor - MQ-9
int isMQ9(double rawValue) {
double RvRo = rawValue * 3.3 / 4095;
double ppm = 3.027*exp(1.0698*( RvRo ));
return ppm;
}
// Carbon Monoxide Gas Sensor - MQ-7
int isMQ7(double rawValue) {
double RvRo = rawValue * 3.3 / 4095;
double ppm = 3.027*exp(1.0698*( RvRo ));
return ppm;
}
// Alcohol Gas Sensor - MQ-3
int isMQ3(double rawValue) {
double RvRo = rawValue * 3.3 / 4095;
double bac = RvRo * 0.21;
return bac;
}
getPIR.ino
// PIR Motion
// Setup PIR
void setupPIR() {
// Setup PIR Montion
pinMode(iMotion, INPUT_PULLUP);
}
// isPIR Motion
void isPIR() {
// Proximity
proximity = digitalRead(iMotion);
if (proximity == LOW)
{
// PIR Motion Sensor's LOW, Motion is detected
Det = "Motion Yes";
// Serial
Serial.println( Det );
}
else
{
// PIR Motion Sensor's HIGH
Det = "No";
// Serial
Serial.println( Det );
}
}
getRHT.ino
// RHT Temperature and Humidity Sensor
// setup RHT Temperature and Humidity Sensor
void setupRTH03() {
// RHT Temperature and Humidity Sensor
// Call rht.begin() to initialize the sensor and our data pin
rht.begin(RHT03_DATA_PIN);
}
// RHT Temperature and Humidity Sensor
void isRHT03(){
// Call rht.update() to get new humidity and temperature values from the sensor.
int updateRet = rht.update();
// The humidity(), tempC(), and tempF() functions can be called -- after
// a successful update() -- to get the last humidity and temperature value
latestHumidity = rht.humidity();
latestTempC = rht.tempC();
latestTempF = rht.tempF();
// Serial
// RHT Temperature and Humidity Sensor
// Temperature F
Serial.print( "Temp F: " );
Serial.println( latestTempF );
// Temperature C
Serial.print( "Temp C: " );
Serial.println( latestTempC );
// Humidity
Serial.print( "Humidity: " );
Serial.println( latestHumidity );
}
setup.ino
// Setup
void setup()
{
// EEPROM Unique ID
isUID();
// Serial
Serial.begin( 9600 );
// RHT Temperature and Humidity Sensor
// setup RTH03 Humidity and Temperature Sensor
setupRTH03();
// PIR Motion
// Setup PIR
setupPIR();
// Initialize digital pin LED_BUILTIN as an output.
pinMode(LED_BUILTIN, OUTPUT);
// Don Luc Electronics
Serial.println( "Don Luc Electronics" );
// Version
Serial.println( sver );
// Is Unit ID
Serial.println( uid );
delay( 5000 );
}
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
- Desktop Applications (Windows, OSX, Linux, Multi-OS, Multi-Tier, etc…)
- Mobile Applications (Android, iOS, Blackberry, Windows Mobile, Windows CE, etc…)
- Web Applications (LAMP, Scripting, Java, ASP, ASP.NET, RoR, Wakanda, etc…)
- Social Media Programming & Integration (Facebook, Twitter, YouTube, Pinterest, etc…)
- Content Management Systems (WordPress, Drupal, Joomla, Moodle, etc…)
- Bulletin Boards (phpBB, SMF, Vanilla, jobberBase, etc…)
- eCommerce (WooCommerce, OSCommerce, ZenCart, PayPal Shopping Cart, etc…)
Instructor and E-Mentor
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
- DOS, Windows, OSX, Linux, iOS, Android, Multi-OS
- Linux-Apache-PHP-MySQL
Follow Us
J. Luc Paquin – Curriculum Vitae – 2021 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Web: https://www.donluc.com/DLE/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: https://zoom.us/
Patreon: https://www.patreon.com/DonLucElectronics
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc