——
#DonLucElectronics #DonLuc #NixieTube #Nixie #ArduiNIX #ArduinoMega2560 #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Stopwatch
A stopwatch is a timepiece designed to measure the amount of time that elapses between its activation and deactivation. In manual timing, the clock is started and stopped by a person pressing a button. The timing functions are traditionally controlled by two buttons on the case. Pressing the top button starts the timer running, and pressing the button a second time stops it, leaving the elapsed time displayed. A press of the second button then resets the stopwatch to zero. The second button is also used to record split times or lap times. When the split time button is pressed while the watch is running it allows the elapsed time to that point to be read, but the watch mechanism continues running to record total elapsed time. Pressing the split button a second time allows the watch to resume display of total time.
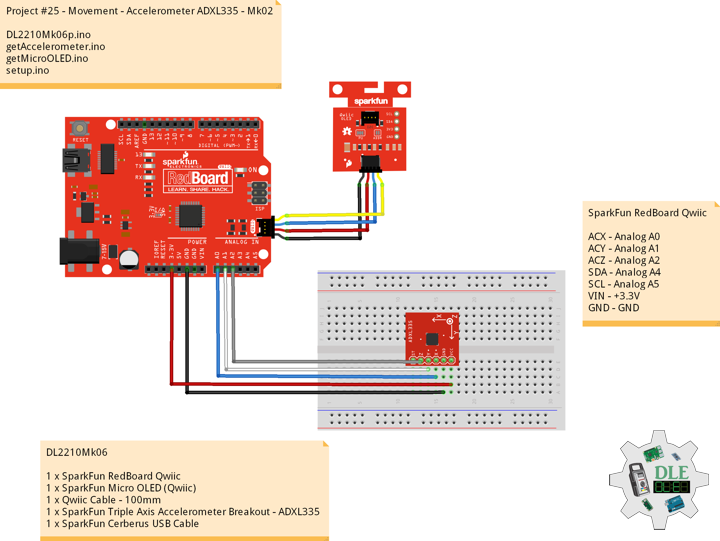
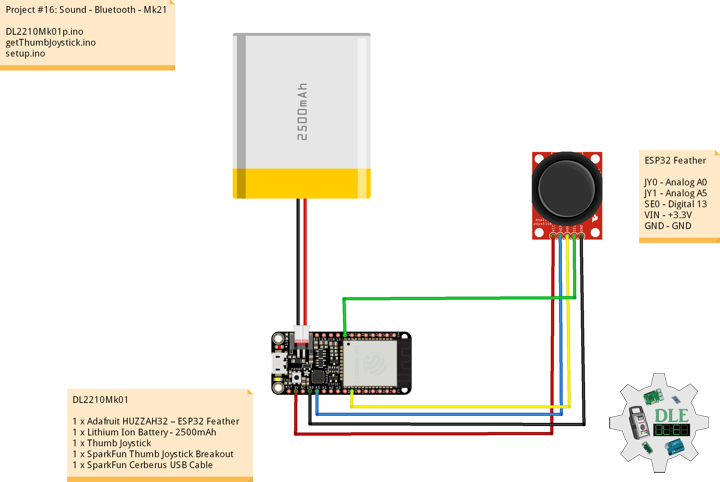
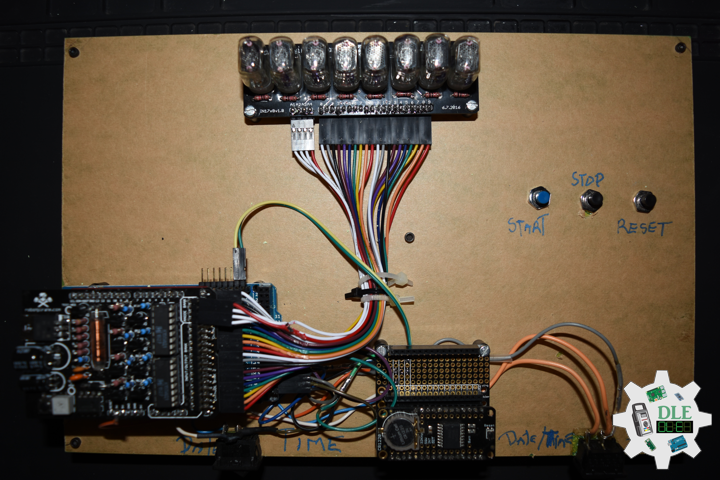
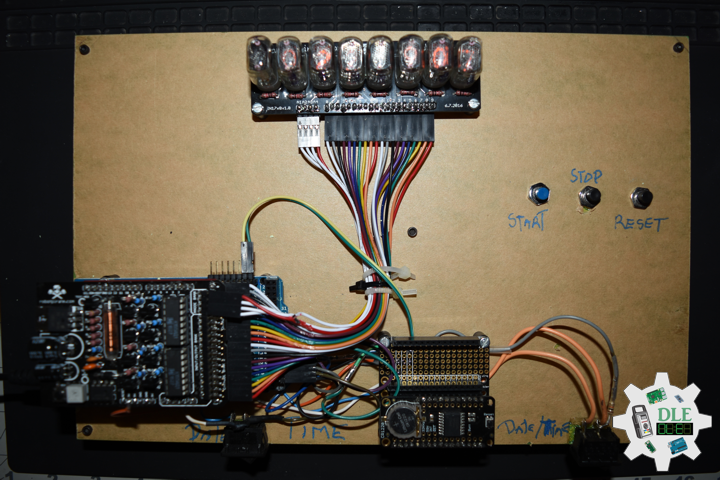
DL2209Mk04
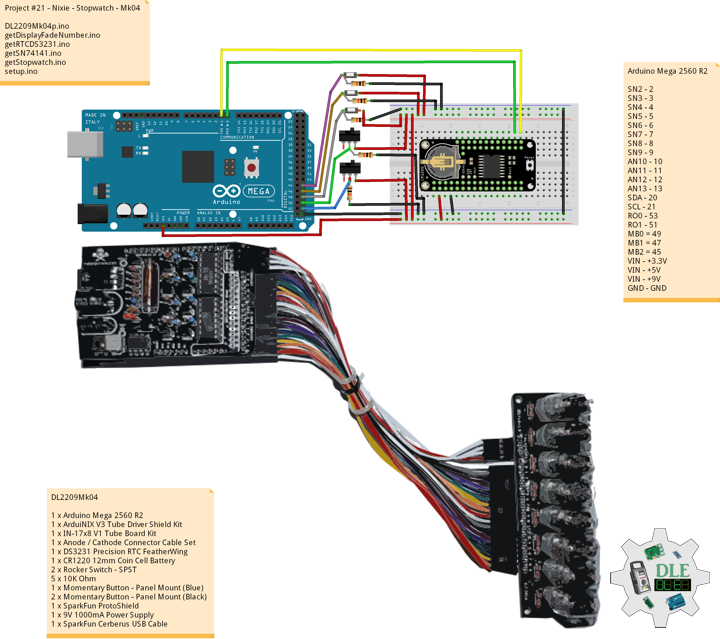
1 x Arduino Mega 2560 R2
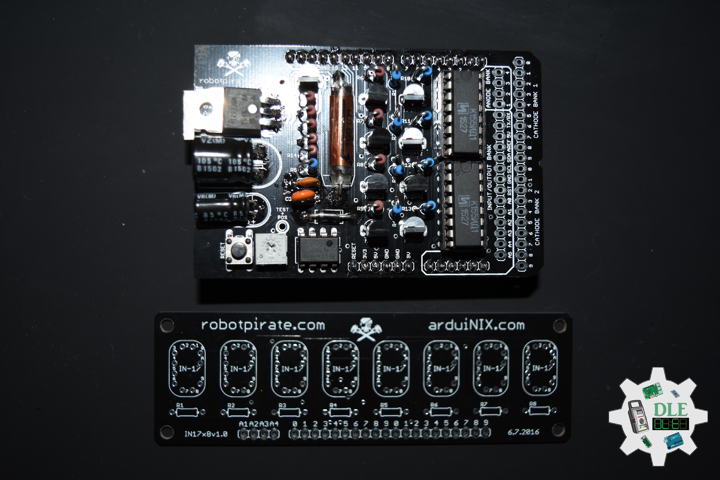
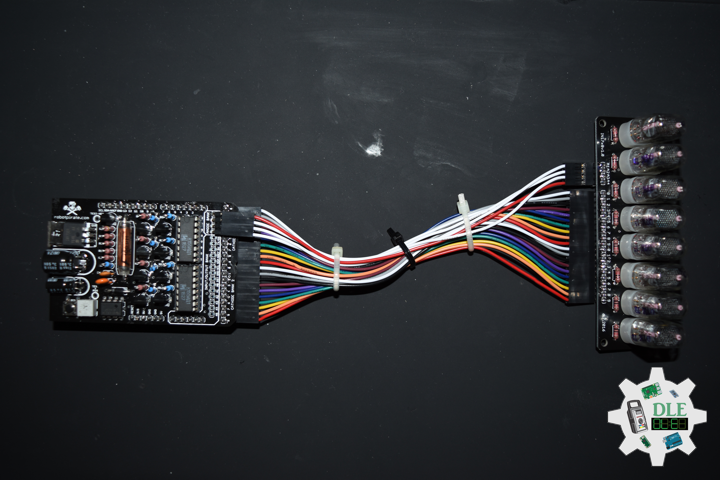
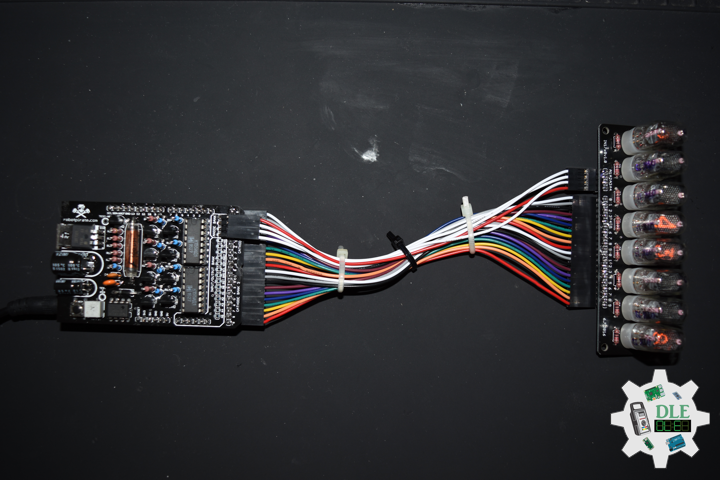
1 x ArduiNIX V3 Tube Driver Shield Kit
1 x IN-17×8 V1 Tube Board Kit
1 x Anode / Cathode Connector Cable Set
1 x DS3231 Precision RTC FeatherWing
1 x CR1220 12mm Coin Cell Battery
2 x Rocker Switch – SPST
5 x 10K Ohm
1 x Momentary Button – Panel Mount (Blue)
2 x Momentary Button – Panel Mount (Black)
1 x SparkFun ProtoShield
1 x 9V 1000mA Power Supply
1 x SparkFun Cerberus USB Cable
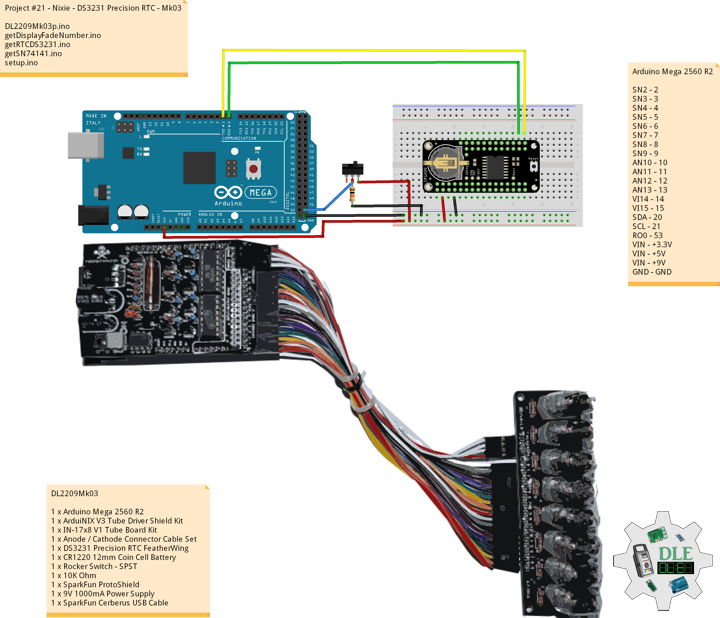
Arduino Mega 2560 R2
SN2 – 2
SN3 – 3
SN4 – 4
SN5 – 5
SN6 – 6
SN7 – 7
SN8 – 8
SN9 – 9
AN10 – 10
AN11 – 11
AN12 – 12
AN13 – 13
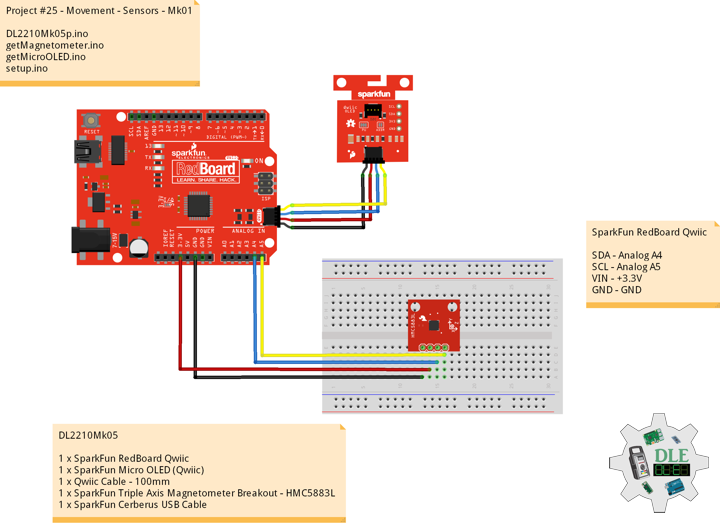
SDA – 20
SCL – 21
RO0 – 53
RO1 – 51
MB0 = 49
MB1 = 47
MB2 = 45
VIN – +3.3V
VIN – +5V
VIN – +9V
GND – GND
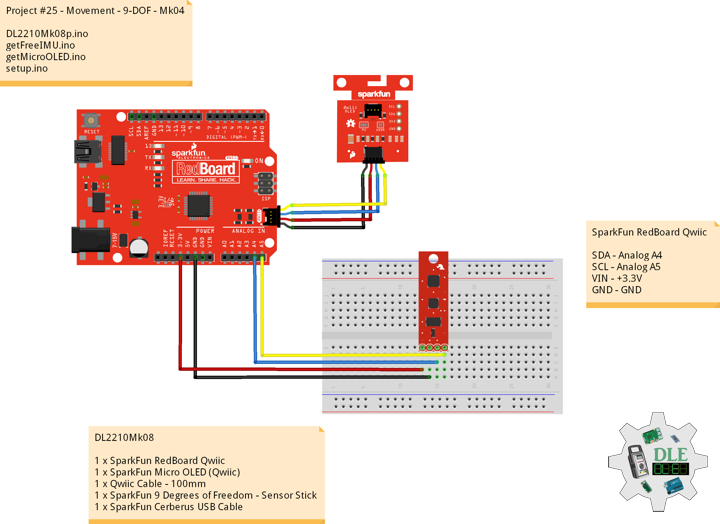
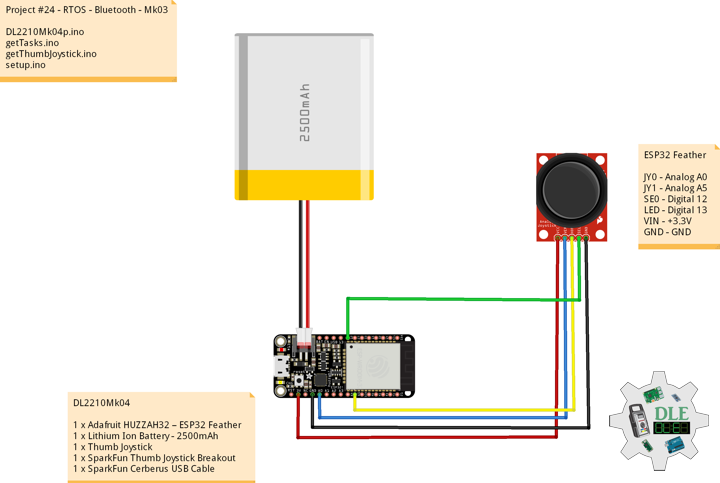
DL2209Mk04p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #21 - Nixie - Stopwatch - Mk04
21-04
DL2209Mk04p.ino
1 x Arduino Mega 2560 R2
1 x ArduiNIX V3 Tube Driver Shield Kit
1 x IN-17x8 V1 Tube Board Kit
1 x Anode / Cathode Connector Cable Set
1 x DS3231 Precision RTC FeatherWing
1 x CR1220 12mm Coin Cell Battery
2 x Rocker Switch - SPST
5 x 10K Ohm
1 x Momentary Button - Panel Mount (Blue)
2 x Momentary Button - Panel Mount (Black)
1 x 9V 1000mA Power Supply
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Wire you to communicate with I2C/TWI devices
// Date and Time DS3231 RTC
#include "RTClib.h"
// SN74141 (1)
int ledPin_0_a = 2;
int ledPin_0_b = 3;
int ledPin_0_c = 4;
int ledPin_0_d = 5;
// SN74141 (2)
int ledPin_1_a = 6;
int ledPin_1_b = 7;
int ledPin_1_c = 8;
int ledPin_1_d = 9;
// Anode pins
int ledPin_a_1 = 10;
int ledPin_a_2 = 11;
int ledPin_a_3 = 12;
int ledPin_a_4 = 13;
// Fade
float fadeMax = 0.1f;
float fadeStep = 0.1f;
// Number Array
int NumberArray[8]={0,0,0,0,0,0,0,0};
int currNumberArray[8]={0,0,0,0,0,0,0,0};
float NumberArrayFadeInValue[8]={0.0f,0.0f,0.0f,0.0f,0.0f,0.0f,0.0f,0.0f};
float NumberArrayFadeOutValue[8]={5.0f,5.0f,5.0f,5.0f,5.0f,5.0f,5.0f,5.0f};
// Date and time functions using a DS3231 RTC
RTC_DS3231 RTC;
// Rocker Switch - SPST
// Rocker Switch 0
const int iRO0 = 53;
// State
int iRO0State = 0;
// Rocker Switch 1
const int iRO1 = 51;
// State
int iRO1State = 0;
// Momentary Button
const int iStartP = 49;
const int iStopP = 47;
const int iResetP = 45;
// Setting hours, minutes, secound and miliseconds to 0
int iH = 0;
int iM = 0;
int iS = 0;
int iMS = 0;
int iMSS = 0;
// Defines starting points
int iStart = 0;
int iStop1 = 0;
int iReset = 0;
// Get the high and low order values for hours,min,seconds.
int lowerHours = 0;
int upperHours = 0;
int lowerMins = 0;
int upperMins = 0;
int lowerSeconds = 0;
int upperSeconds = 0;
int lowerMiliseconds = 0;
int upperMiliseconds = 0;
// Software Version Information
String sver = "21-04";
void loop() {
// Read the state of the Switch value
iRO1State = digitalRead(iRO1);
// If it is the Switch State is HIGH
if (iRO1State == HIGH) {
// Stopwatch
isStart();
} else {
// Date ans Time
isTimeRTC();
}
}
getDisplayFadeNumber.ino
// Display Fade Number
void DisplayFadeNumberString()
{
// Anode channel 1 - numerals 0,4
SetSN74141Chips(currNumberArray[0],currNumberArray[4]);
digitalWrite(ledPin_a_1, HIGH);
delay(NumberArrayFadeOutValue[0]);
SetSN74141Chips(NumberArray[0],NumberArray[4]);
delay(NumberArrayFadeInValue[0]);
digitalWrite(ledPin_a_1, LOW);
// Anode channel 2 - numerals 1,5
SetSN74141Chips(currNumberArray[1],currNumberArray[5]);
digitalWrite(ledPin_a_2, HIGH);
delay(NumberArrayFadeOutValue[1]);
SetSN74141Chips(NumberArray[1],NumberArray[5]);
delay(NumberArrayFadeInValue[1]);
digitalWrite(ledPin_a_2, LOW);
// Anode channel 3 - numerals 2,6
SetSN74141Chips(currNumberArray[2],currNumberArray[6]);
digitalWrite(ledPin_a_3, HIGH);
delay(NumberArrayFadeOutValue[2]);
SetSN74141Chips(NumberArray[2],NumberArray[6]);
delay(NumberArrayFadeInValue[2]);
digitalWrite(ledPin_a_3, LOW);
// Anode channel 4 - numerals 3,7
SetSN74141Chips(currNumberArray[3],currNumberArray[7]);
digitalWrite(ledPin_a_4, HIGH);
delay(NumberArrayFadeOutValue[3]);
SetSN74141Chips(NumberArray[3],NumberArray[7]);
delay(NumberArrayFadeInValue[3]);
digitalWrite(ledPin_a_4, LOW);
// Loop thru and update all the arrays, and fades.
for( int i = 0 ; i < 8 ; i ++ ) //equal to & of digits
{
if( NumberArray[i] != currNumberArray[i] )
{
NumberArrayFadeInValue[i] += fadeStep;
NumberArrayFadeOutValue[i] -= fadeStep;
if( NumberArrayFadeInValue[i] >= fadeMax )
{
NumberArrayFadeInValue[i] = 2.0f;
NumberArrayFadeOutValue[i] = 4.0f; //affects the refresh cycle
currNumberArray[i] = NumberArray[i];
}
}
}
}
getRTCDS3231.ino
// DS3231 Precision RTC
// Setup RTC
void setupRTC() {
// DS3231 Precision RTC
RTC.begin();
if (! RTC.begin() ) {
while (1) delay(10);
}
if (RTC.lostPower()) {
// Following line sets the RTC to the date & time this sketch was compiled
RTC.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// August 2, 2021 at 13:53:0 you would call:
// RTC.adjust(DateTime(2022, 4, 26, 11, 39, 0));
}
}
// Date ans Time - isTimeRTC
void isTimeRTC() {
// Date and Time
DateTime now = RTC.now();
// Read the state of the Switch value
iRO0State = digitalRead(iRO0);
// If it is the Switch State is HIGH
if (iRO0State == HIGH) {
// Get the high and low order values for hours, minute, seconds
int lowerHours = now.hour() % 10;
int upperHours = now.hour() - lowerHours;
int lowerMins = now.minute() % 10;
int upperMins = now.minute() - lowerMins;
int lowerSeconds = now.second() % 10;
int upperSeconds = now.second() - lowerSeconds;
// 10 >= hours, minute, seconds
if( upperSeconds >= 10 ) upperSeconds = upperSeconds / 10;
if( upperMins >= 10 ) upperMins = upperMins / 10;
if( upperHours >= 10 ) upperHours = upperHours / 10;
if( upperHours == 0 && lowerHours == 0 )
{
upperHours = 1;
lowerHours = 2;
}
// Fill in the Number array used to display on the Nixie tubes
NumberArray[7] = upperHours;
NumberArray[6] = lowerHours;
NumberArray[5] = 0;
NumberArray[4] = upperMins;
NumberArray[3] = lowerMins;
NumberArray[2] = 0;
NumberArray[1] = upperSeconds;
NumberArray[0] = lowerSeconds;
} else {
// Get the high and low order values for year, month, day
int iYear = now.year() - 2000;
int lowerYear = iYear % 10;
int upperYear = iYear - lowerYear;
int lowerMonth = now.month() % 10;
int upperMonth = now.month() - lowerMonth;
int lowerDay = now.day() % 10;
int upperDay = now.day() - lowerDay;
// 10 >= year, month, day
if( upperDay >= 10 ) upperDay = upperDay / 10;
if( upperMonth >= 10 ) upperMonth = upperMonth / 10;
if( upperYear >= 10 ) upperYear = upperYear / 10;
// Fill in the Number array used to display on the Nixie tubes
NumberArray[7] = 2;
NumberArray[6] = 0;
NumberArray[5] = upperYear;
NumberArray[4] = lowerYear;
NumberArray[3] = upperMonth;
NumberArray[2] = lowerMonth;
NumberArray[1] = upperDay;
NumberArray[0] = lowerDay;
}
// Display
DisplayFadeNumberString();
}
getSN74141.ino
// SN74141
// SN74141 : Truth Table
//D C B A #
//L,L,L,L 0
//L,L,L,H 1
//L,L,H,L 2
//L,L,H,H 3
//L,H,L,L 4
//L,H,L,H 5
//L,H,H,L 6
//L,H,H,H 7
//H,L,L,L 8
//H,L,L,H 9
// isSetupSN74141
void isSetupSN74141(){
pinMode(ledPin_0_a, OUTPUT);
pinMode(ledPin_0_b, OUTPUT);
pinMode(ledPin_0_c, OUTPUT);
pinMode(ledPin_0_d, OUTPUT);
pinMode(ledPin_1_a, OUTPUT);
pinMode(ledPin_1_b, OUTPUT);
pinMode(ledPin_1_c, OUTPUT);
pinMode(ledPin_1_d, OUTPUT);
pinMode(ledPin_a_1, OUTPUT);
pinMode(ledPin_a_2, OUTPUT);
pinMode(ledPin_a_3, OUTPUT);
pinMode(ledPin_a_4, OUTPUT);
}
// SetSN74141Chips
void SetSN74141Chips( int num2, int num1 )
{
// Set defaults
// Will display a zero.
int a = 0;
int b = 0;
int c = 0;
int d = 0;
// Load the a,b,c,d.. to send to the SN74141 IC (1)
switch( num1 )
{
case 0:
a=0;
b=0;
c=0;
d=0;
break;
case 1:
a=1;
b=0;
c=0;
d=0;
break;
case 2:
a=0;
b=1;
c=0;
d=0;
break;
case 3:
a=1;
b=1;
c=0;
d=0;
break;
case 4:
a=0;
b=0;
c=1;
d=0;
break;
case 5:
a=1;
b=0;
c=1;
d=0;
break;
case 6:
a=0;
b=1;
c=1;
d=0;
break;
case 7:
a=1;
b=1;
c=1;
d=0;
break;
case 8:
a=0;
b=0;
c=0;
d=1;
break;
case 9:
a=1;
b=0;
c=0;
d=1;
break;
default:
a=1;
b=1;
c=1;
d=1;
break;
}
// Write to output pins.
digitalWrite(ledPin_0_d, d);
digitalWrite(ledPin_0_c, c);
digitalWrite(ledPin_0_b, b);
digitalWrite(ledPin_0_a, a);
// Load the a,b,c,d.. to send to the SN74141 IC (2)
switch( num2 )
{
case 0:
a=0;
b=0;
c=0;
d=0;
break;
case 1:
a=1;
b=0;
c=0;
d=0;
break;
case 2:
a=0;
b=1;
c=0;
d=0;
break;
case 3:
a=1;
b=1;
c=0;
d=0;
break;
case 4:
a=0;
b=0;
c=1;
d=0;
break;
case 5:
a=1;
b=0;
c=1;
d=0;
break;
case 6:
a=0;
b=1;
c=1;
d=0;
break;
case 7:
a=1;
b=1;
c=1;
d=0;
break;
case 8:
a=0;
b=0;
c=0;
d=1;
break;
case 9:
a=1;
b=0;
c=0;
d=1;
break;
default:
a=1;
b=1;
c=1;
d=1;
break;
}
// Write to output pins
digitalWrite(ledPin_1_d, d);
digitalWrite(ledPin_1_c, c);
digitalWrite(ledPin_1_b, b);
digitalWrite(ledPin_1_a, a);
}
getStopwatch.ino
// Stopwatch
// Setup Stopwatch
void isSetupStopwatch(){
// Switch
pinMode(iRO0, INPUT);
pinMode(iRO1, INPUT);
// Momentary Button
pinMode(iStartP, INPUT);
pinMode(iStopP, INPUT);
pinMode(iResetP, INPUT);
}
// Start
void isStart()
{
// Reading buton state iStart
iStart = digitalRead(iStartP);
if(iStart == HIGH)
{
// Calls the isStopWatch function
isStopWatch();
}
}
// Stop Watch
void isStopWatch()
{
// Miliseconds
iMS = iMS + 10;
if(iMS == 600)
{
iMS = 0;
iMSS = 0;
iS = iS + 1;
} else if (iMS == 60) { // 1
iMSS = iMSS + 1;
} else if (iMS == 120) { // 2
iMSS = iMSS + 1;
} else if (iMS == 180) { //3
iMSS = iMSS + 1;
} else if (iMS == 240) { // 4
iMSS = iMSS + 1;
} else if (iMS == 300) { // 5
iMSS = iMSS + 1;
} else if (iMS == 360) { // 6
iMSS = iMSS + 1;
} else if (iMS == 420) { // 7
iMSS = iMSS + 1;
} else if (iMS == 480) { // 8
iMSS = iMSS + 1;
} else if (iMS == 540) { // 9
iMSS = iMSS + 1;
}
// If state for counting up minutes
if( iS == 60)
{
iS = 0;
iM = iM + 1;
}
// If state for counting up hours
if( iM == 60)
{
iM = 0;
iH = iH + 01;
}
// Get the high and low order values for hours, minute, seconds, Miliseconds
int lowerHours = iH % 10;
int upperHours = iH - lowerHours;
int lowerMins = iM % 10;
int upperMins = iM - lowerMins;
int lowerSeconds = iS % 10;
int upperSeconds = iS - lowerSeconds;
int lowerMiliseconds = iMSS;
int upperMiliseconds = iMSS - lowerMiliseconds;
// 10 >= hours, minute, seconds, Miliseconds
if( upperSeconds >= 10 ) upperSeconds = upperSeconds / 10;
if( upperMins >= 10 ) upperMins = upperMins / 10;
if( upperHours >= 10 ) upperHours = upperHours / 10;
// Fill in the Number array used to display on the Nixie tubes
NumberArray[7] = upperHours;
NumberArray[6] = lowerHours;
NumberArray[5] = upperMins;
NumberArray[4] = lowerMins;
NumberArray[3] = upperSeconds;
NumberArray[2] = lowerSeconds;
NumberArray[1] = lowerMiliseconds;
NumberArray[0] = lowerMiliseconds;
// Display
DisplayFadeNumberString();
// Reading buton state Stop
iStop1 = digitalRead(iStopP);
// Checking if button is pressed
if(iStop1 == HIGH)
{
// Calls the isStopwatchStop function
isStopwatchStop();
}
else
{
// Calls the isStopWatch function
isStopWatch();
}
}
// Stopwatch Stop
void isStopwatchStop()
{
// Get the high and low order values for hours, minute, seconds, Miliseconds
int lowerHours = iH % 10;
int upperHours = iH - lowerHours;
int lowerMins = iM % 10;
int upperMins = iM - lowerMins;
int lowerSeconds = iS % 10;
int upperSeconds = iS - lowerSeconds;
int lowerMiliseconds = iMSS;
int upperMiliseconds = iMSS - lowerMiliseconds;
// 10 >= hours, minute, seconds, Miliseconds
if( upperSeconds >= 10 ) upperSeconds = upperSeconds / 10;
if( upperMins >= 10 ) upperMins = upperMins / 10;
if( upperHours >= 10 ) upperHours = upperHours / 10;
// Fill in the Number array used to display on the Nixie tubes
NumberArray[7] = upperHours;
NumberArray[6] = lowerHours;
NumberArray[5] = upperMins;
NumberArray[4] = lowerMins;
NumberArray[3] = upperSeconds;
NumberArray[2] = lowerSeconds;
NumberArray[1] = lowerMiliseconds;
NumberArray[0] = lowerMiliseconds;
// Display
DisplayFadeNumberString();
// Reading buton state iStart
iStart = digitalRead(iStartP);
if(iStart == HIGH)
{
// Calls the isStopWatch function
isStopWatch();
}
// Reading buton state
iReset = digitalRead(iResetP);
if(iReset == HIGH)
{
// Calls the isStopwatchReset function
isStopwatchReset();
loop();
}
if(iReset == LOW)
{
// Calls the isStopwatchStop function
isStopwatchStop();
}
}
// Stopwatch Reset
void isStopwatchReset()
{
// Seting hours to 0
iH = 0;
// Seting minutes to 0
iM = 0;
// Seting seconds to 0
iS = 0;
// Seting miliseconds to 0
iMS = 0;
// Seting miliseconds to 0
iMSS = 0;
// Fill in the Number array used to display on the Nixie tubes
NumberArray[7] = 0;
NumberArray[6] = 0;
NumberArray[5] = 0;
NumberArray[4] = 0;
NumberArray[3] = 0;
NumberArray[2] = 0;
NumberArray[1] = 0;
NumberArray[0] = 0;
// Display
DisplayFadeNumberString();
// Exiting the program and returning to the point where entered the program
return;
}
setup.ino
// Setup
void setup() {
// isSetupSN74141
isSetupSN74141();
// Setup Stopwatch
isSetupStopwatch();
// Setup RTC
setupRTC();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Research & Development (R & D)
Instructor and E-Mentor
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
J. Luc Paquin – Curriculum Vitae – 2022 English & Español
https://www.jlpconsultants.com/luc/
Web: https://www.donluc.com/
Web: https://www.jlpconsultants.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc