Robotic
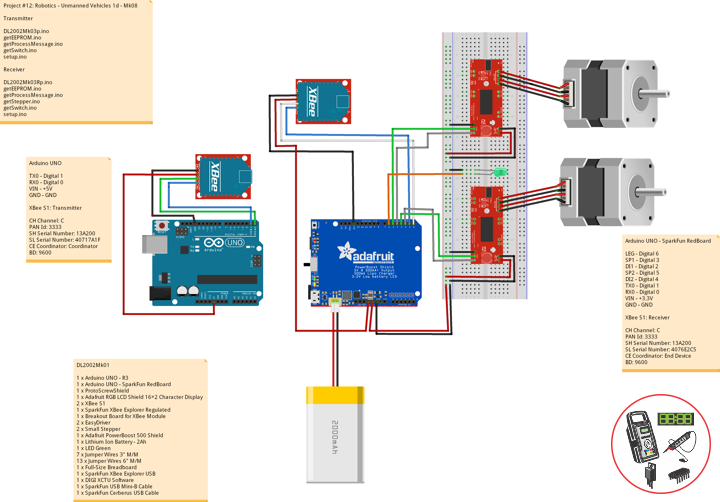
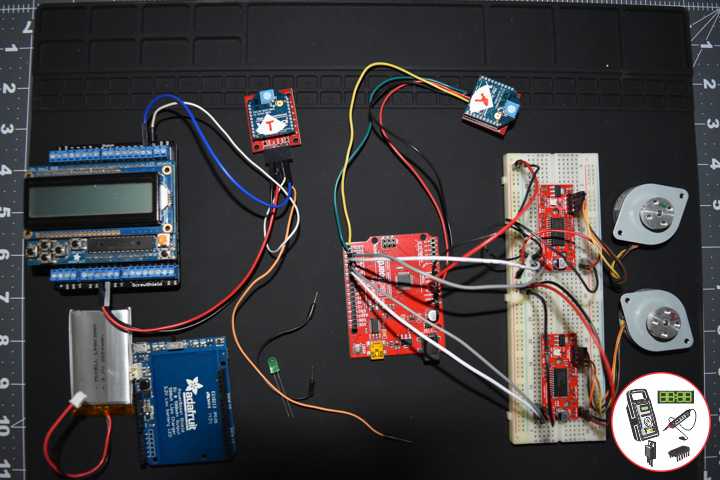
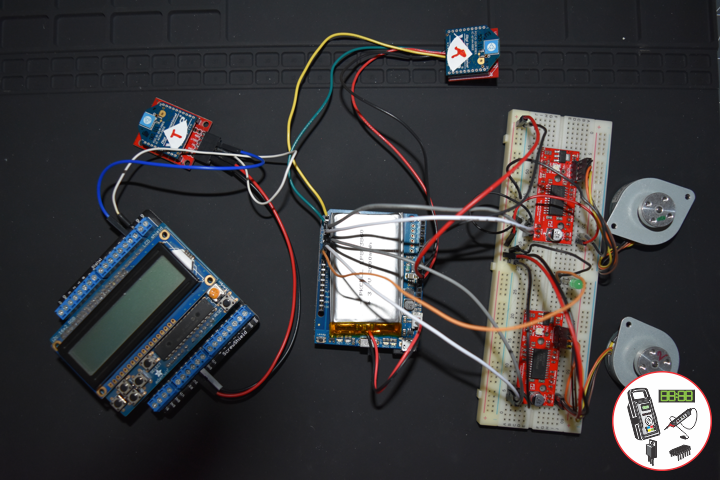
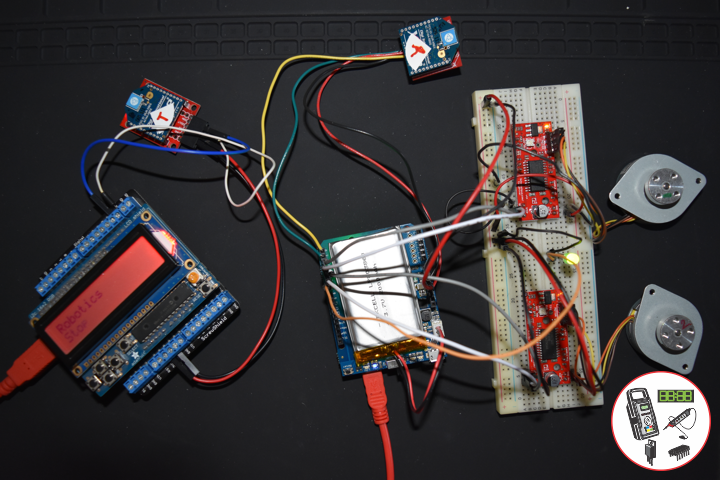
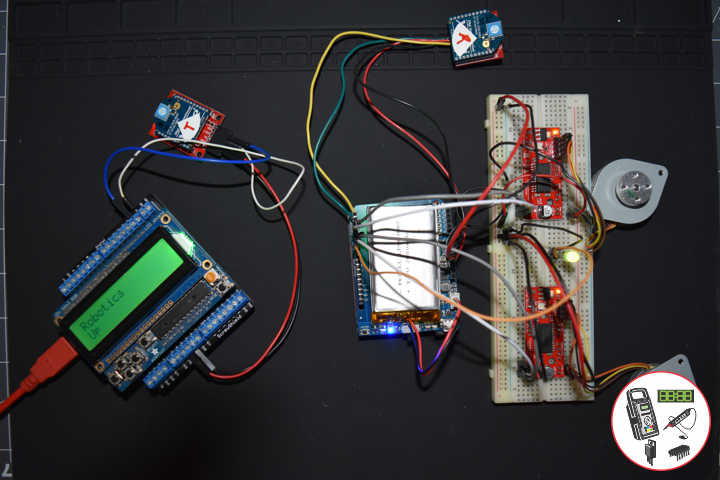
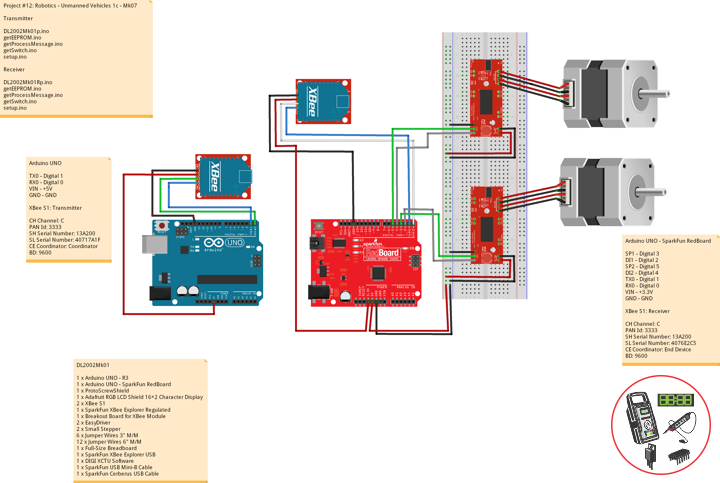
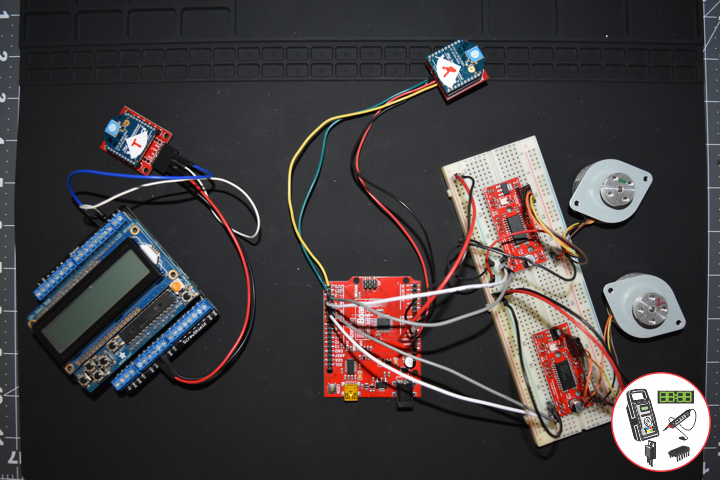
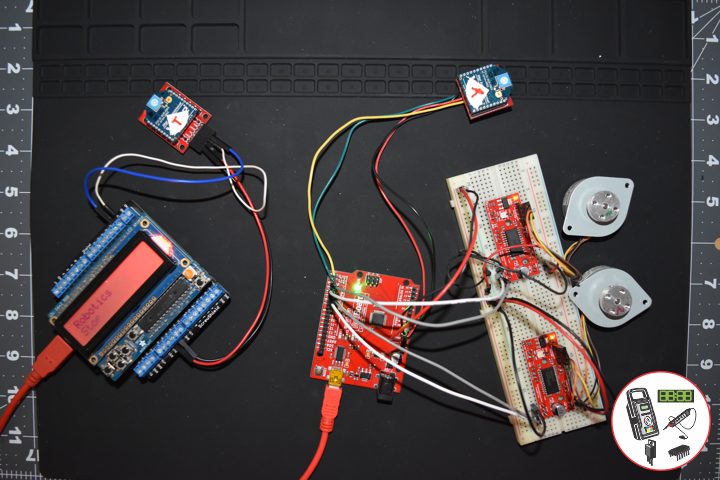
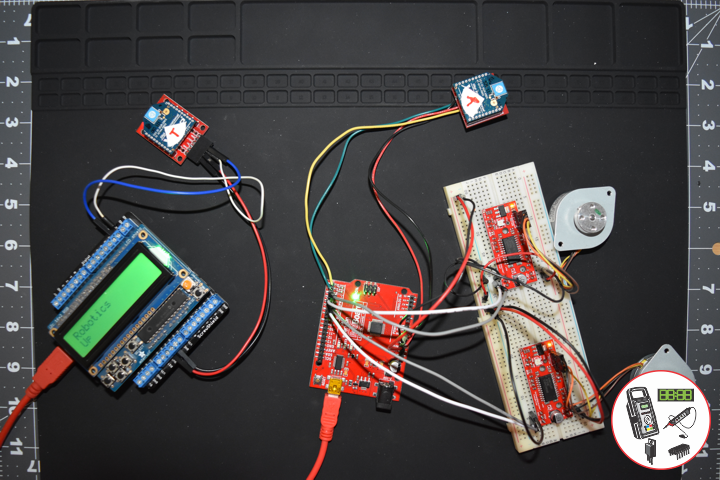
Project #12: Robotics – Unmanned Vehicles 1d – Mk08
——
——
——
——
——
——
DL2002Mk03
1 x Arduino UNO – R3
1 x Arduino UNO – SparkFun RedBoard
1 x ProtoScrewShield
1 x Adafruit RGB LCD Shield 16×2 Character Display
2 x XBee S1
1 x SparkFun XBee Explorer Regulated
1 x Breakout Board for XBee Module
2 x EasyDriver
2 x Small Stepper
1 x Adafruit PowerBoost 500 Shield
1 x Lithium Ion Battery – 2Ah
1 x LED Green
7 x Jumper Wires 3″ M/M
13 x Jumper Wires 6″ M/M
1 x Full-Size Breadboard
1 x SparkFun XBee Explorer USB
1 x DIGI XCTU Software
1 x SparkFun USB Mini-B Cable
1 x SparkFun Cerberus USB Cable
Arduino UNO
TX0 – Digital 1
RX0 – Digital 0
VIN – +5V
GND – GND
XBee S1: Transmitter
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 40717A1F
CE Coordinator: Coordinator
BD: 9600
DL2002Mk03p.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #12: Robotics - Unmanned Vehicles 1d - Mk08
// 02-03
// DL2002Mk01p.ino 12-08
// Arduino UNO - R3
// ProtoScrewShield
// Adafruit RGB LCD Shield 16×2 Character Display
// EEPROM with Unique ID
// Transmitter
// XBee S1
// Stepper
// Include the library code:
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Adafruit RGB LCD Shield
#include <Adafruit_RGBLCDShield.h>
// Adafruit RGB LCD Shield
Adafruit_RGBLCDShield RGBLCDShield = Adafruit_RGBLCDShield();
// These #defines make it easy to set the backlight color
#define OFF 0x0
#define RED 0x1
#define YELLOW 0x3
#define GREEN 0x2
#define TEAL 0x6
#define BLUE 0x4
#define VIOLET 0x5
#define WHITE 0x7
// Momentary Button
int yy = 0;
uint8_t momentaryButton = 0;
// Communication
unsigned long dTime = 50;
// The current address in the EEPROM (i.e. which byte we're going to read to next)
// Version
String sver = "12-7.p";
// Unit ID Information
String uid = "";
void loop() {
// Clear
RGBLCDShield.clear();
// set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("Robotics"); // Robotics
// Momentary Button
momentaryButton = RGBLCDShield.readButtons();
switch ( yy ) {
case 1:
// Up
isSwitch1();
break;
case 2:
// Down
isSwitch2();
break;
case 3:
// Right
isSwitch3();
break;
case 4:
// Left
isSwitch4();
break;
case 5:
// Stop
isSwitch5();
break;
default:
// Stop
yy = 5;
RGBLCDShield.setBacklight(RED);
isSwitch5();
}
if ( momentaryButton ) {
if ( momentaryButton & BUTTON_UP ) {
yy = 1;
// Up
RGBLCDShield.setBacklight(GREEN);
}
if ( momentaryButton & BUTTON_DOWN ) {
yy = 2;
// Down
RGBLCDShield.setBacklight(VIOLET);
}
if ( momentaryButton & BUTTON_LEFT ) {
yy = 3;
// Right
RGBLCDShield.setBacklight(TEAL);
}
if ( momentaryButton & BUTTON_RIGHT ) {
yy = 4;
// Left
RGBLCDShield.setBacklight(YELLOW);
}
if ( momentaryButton & BUTTON_SELECT ) {
yy = 5;
// Stop
RGBLCDShield.setBacklight(RED);
}
}
// Process Message
isProcessMessage();
delay( dTime );
}
getEEPROM.ino
// EEPROM
// isUID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// ProcessMessage
// isProcessMessage
void isProcessMessage() {
// String msg = "";
/// Loop through serial buffer one byte at a time until you reach * which will be end of message
//while ( Serial.available() )
// {
// Print => XBEE + Unit ID + Version + *
// msg = "XBEE|" + uid + "|" + sver + "|" + yy + "|*";
Serial.print( '<' );
Serial.print( yy );
Serial.println( '*' );
// }
}
getSwitch.ino
// Switch
// Switch 1
void isSwitch1(){
yy = 1;
// Stepper
// Up
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Up");
}
// Switch 2
void isSwitch2(){
yy = 2;
// Stepper
// Down
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Down");
}
// Switch 3
void isSwitch3(){
yy = 3;
// Stepper
// Right
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Right");
}
// Switch 4
void isSwitch4(){
yy = 4;
// Stepper
// Left
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Left");
}
// Switch 5
void isSwitch5(){
yy = 5;
// Stepper
// Stop
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Stop");
}
setup.ino
// Setup
void setup() {
// Open serial port at 9600 baud
Serial.begin( 9600 );
// Pause
delay(5);
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Adafruit RGB LCD Shield
// Set up the LCD's number of columns and rows:
RGBLCDShield.begin(16, 2);
RGBLCDShield.setBacklight(GREEN);
// Display
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("Don Luc Electron"); // Don luc Electron
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print("Robotics"); // Robotics
// Serial
// Serial.println( "Don Luc Electronics");
// Serial.println( "Robotics");
delay(5000);
// Clear
RGBLCDShield.clear();
// Display
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("Version: "); // Version
RGBLCDShield.print( sver );
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print("UID: "); // Unit ID Information
RGBLCDShield.print( uid );
// Serial
// Serial.print( "Software Version Information: ");
// Serial.println( sver );
// Serial.print( "Unit ID Information: ");
// Serial.println( uid );
delay(5000);
// Clear
RGBLCDShield.clear();
}
Arduino UNO – SparkFun RedBoard
LEG – Digital 6
SP1 – Digital 3
DI1 – Digital 2
SP2 – Digital 5
DI2 – Digital 4
TX0 – Digital 1
RX0 – Digital 0
VIN – +3.3V
GND – GND
XBee S1: Receiver
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 4076E2C5
CE Coordinator: End Device
BD: 9600
DL2002Mk03Rp.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #12: Robotics - Unmanned Vehicles 1d - Mk08
// 02-03
// DL2002Mk01Rp.ino 12-08
// Arduino UNO - SparkFun RedBoard
// EEPROM with Unique ID
// Receiver
// Breakout Board for XBee Module
// XBee S1
// 2 x EasyDriver
// 2 x Small Stepper
// Adafruit PowerBoost 500 Shield
// Lithium Ion Battery - 2Ah
// LED Green
// Include the library code:
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Momentary Button
int yy = "";
// 2 x EasyDriver - 2 x Stepper
int dirPinR = 2; // EasyDriver Right
int stepPinR = 3; // stepPin Right
int dirPinL = 4; // EasyDriver Left
int stepPinL = 5; // stepPin Left
int i = 0;
// LED Green
int iLEDGreen = 6;
// Software Version Information
String sver = "12-08";
// Unit ID information
String uid = "";
void loop() {
// Check for serial messages
if ( Serial.available() )
{
isProcessMessage();
}
// Switch
isSwitch();
}
getEEPROM.ino
// EEPROM
// isUID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// ProcessMessage
// isProcessMessage
void isProcessMessage() {
int incb = 0;
String msg = "";
String zzz = "";
// Loop through serial buffer one byte at a time until you reach * which will be end of message
while ( Serial.available() )
{
// Read the incoming byte:
incb = Serial.read();
// Add character to string
msg = msg + char(incb);
// Check if receive character is the end of message *
if ( incb == 42 )
{
// Serial.println(msg);
zzz = msg.charAt( 1 );
// Serial.println(zzz);
yy = zzz.toInt();
// Serial.println( yy );
}
}
}
getStepper.ino
// Stepper
// isStepperSetup
void isStepperSetup() {
// 2 x EasyDriver
pinMode(dirPinR, OUTPUT);
pinMode(stepPinR, OUTPUT);
pinMode(dirPinL, OUTPUT);
pinMode(stepPinL, OUTPUT);
}
// isStepper1
void isStepper1(){
// 2 x EasyDriver - Up
digitalWrite(dirPinR, LOW); // Set the direction.
delay(5);
digitalWrite(dirPinL, LOW); // Set the direction.
delay(5);
for (i = 0; i<300; i++) // Iterate for 1000 microsteps.
{
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinR, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(300); // This delay time is close to top speed.
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(300); // This delay time is close to top speed.
}
}
// isStepper2
void isStepper2(){
// 2 x EasyDriver
digitalWrite(dirPinR, HIGH); // Set the direction.
delay(5);
digitalWrite(dirPinL, HIGH); // Set the direction.
delay(5);
for (i = 0; i<1000; i++) // Iterate for 1000 microsteps.
{
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinR, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(300); // This delay time is close to top speed.
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(300); // This delay time is close to top speed.
}
}
// Switch 3
void isStepper3(){
// Right
// 2 x EasyDriver
digitalWrite(dirPinR, LOW); // Set the direction.
delay(5);
digitalWrite(dirPinL, HIGH); // Set the direction.
delay(5);
for (i = 0; i<300; i++) // Iterate for 1000 microsteps.
{
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinR, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(300); // This delay time is close to top speed.
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(300); // This delay time is close to top speed.
}
}
// Switch 4
void isStepper4(){
// Left
// 2 x EasyDriver
digitalWrite(dirPinR, HIGH); // Set the direction.
delay(5);
digitalWrite(dirPinL, LOW); // Set the direction.
delay(5);
for (i = 0; i<300; i++) // Iterate for 1000 microsteps.
{
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinR, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(300); // This delay time is close to top speed.
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(300); // This delay time is close to top speed.
}
}
// isStepperStop
void isStepperStop() {
// 2 x EasyDriver
digitalWrite(dirPinR, LOW); // Set the direction.
delay(5);
digitalWrite(dirPinL, LOW); // Set the direction.
delay(5);
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
}
getSwitch.ino
// Switch
// isSwitch
void isSwitch(){
switch ( yy ) {
case 1:
// Stepper 1 - Up
isStepper1();
break;
case 2:
// Stepper 2 - Back
isStepper2();
break;
case 3:
// Stepper 3 - Right
isStepper3();
break;
case 4:
// Stepper 4 - Left
isStepper4();
break;
case 5:
// Stepper Stop
isStepperStop();
break;
default:
// Stepper Stop
isStepperStop();
}
}
setup.ino
// Setup
void setup() {
// Open the serial port at 9600 bps:
Serial.begin( 9600 );
// Pause
delay(5);
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Serial
// Serial.print( "Software Version Information: ");
// Serial.println( sver );
// Serial.print( "Unit ID Information: ");
// Serial.println( uid );
// delay(5000);
// 2 x EasyDriver
isStepperSetup();
// LED Green
pinMode(iLEDGreen, OUTPUT);
digitalWrite(iLEDGreen, HIGH);
}
Follow Us
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: http://neosteamlabs.com/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Facebook: https://www.facebook.com/neosteam.labs.9/
Instagram: https://www.instagram.com/neosteamlabs/
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Twitter: https://twitter.com/labs_steam
Etsy: https://www.etsy.com/shop/NeoSteamLabs
Don Luc
Project #12: Robotics – Unmanned Vehicles 1c – Mk07
——
——
——
——
——
DL2002Mk01
1 x Arduino UNO – R3
1 x Arduino UNO – SparkFun RedBoard
1 x ProtoScrewShield
1 x Adafruit RGB LCD Shield 16×2 Character Display
2 x XBee S1
1 x SparkFun XBee Explorer Regulated
1 x Breakout Board for XBee Module
2 x EasyDriver
2 x Small Stepper
6 x Jumper Wires 3″ M/M
12 x Jumper Wires 6″ M/M
1 x Full-Size Breadboard
1 x SparkFun XBee Explorer USB
1 x DIGI XCTU Software
1 x SparkFun USB Mini-B Cable
1 x SparkFun Cerberus USB Cable
Arduino UNO
TX0 – Digital 1
RX0 – Digital 0
VIN – +5V
GND – GND
XBee S1: Transmitter
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 40717A1F
CE Coordinator: Coordinator
BD: 9600
DL2002Mk01p.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #12: Robotics - Unmanned Vehicles 1c - Mk07
// 02-01
// DL2002Mk01p.ino 12-07
// Arduino UNO - R3
// ProtoScrewShield
// Adafruit RGB LCD Shield 16×2 Character Display
// EEPROM with Unique ID
// Transmitter
// XBee S1
// Stepper
// Include the library code:
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Adafruit RGB LCD Shield
#include <Adafruit_RGBLCDShield.h>
// Adafruit RGB LCD Shield
Adafruit_RGBLCDShield RGBLCDShield = Adafruit_RGBLCDShield();
// These #defines make it easy to set the backlight color
#define OFF 0x0
#define RED 0x1
#define YELLOW 0x3
#define GREEN 0x2
#define TEAL 0x6
#define BLUE 0x4
#define VIOLET 0x5
#define WHITE 0x7
// Momentary Button
int yy = 0;
uint8_t momentaryButton = 0;
// Communication
unsigned long dTime = 50;
// The current address in the EEPROM (i.e. which byte we're going to read to next)
// Version
String sver = "12-7.p";
// Unit ID Information
String uid = "";
void loop() {
// Clear
RGBLCDShield.clear();
// set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("Robotics"); // Robotics
// Momentary Button
momentaryButton = RGBLCDShield.readButtons();
switch ( yy ) {
case 1:
// Up
isSwitch1();
break;
case 2:
// Down
isSwitch2();
break;
case 3:
// Right
isSwitch3();
break;
case 4:
// Left
isSwitch4();
break;
case 5:
// Stop
isSwitch5();
break;
default:
// Stop
yy = 5;
RGBLCDShield.setBacklight(RED);
isSwitch5();
}
if ( momentaryButton ) {
if ( momentaryButton & BUTTON_UP ) {
yy = 1;
// Up
RGBLCDShield.setBacklight(GREEN);
}
if ( momentaryButton & BUTTON_DOWN ) {
yy = 2;
// Down
RGBLCDShield.setBacklight(VIOLET);
}
if ( momentaryButton & BUTTON_LEFT ) {
yy = 3;
// Right
RGBLCDShield.setBacklight(TEAL);
}
if ( momentaryButton & BUTTON_RIGHT ) {
yy = 4;
// Left
RGBLCDShield.setBacklight(YELLOW);
}
if ( momentaryButton & BUTTON_SELECT ) {
yy = 5;
// Stop
RGBLCDShield.setBacklight(RED);
}
}
// Process Message
isProcessMessage();
delay( dTime );
}
getEEPROM.ino
// EEPROM
// isUID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// ProcessMessage
// isProcessMessage
void isProcessMessage() {
// String msg = "";
/// Loop through serial buffer one byte at a time until you reach * which will be end of message
//while ( Serial.available() )
// {
// Print => XBEE + Unit ID + Version + *
// msg = "XBEE|" + uid + "|" + sver + "|" + yy + "|*";
Serial.print( '<' );
Serial.print( yy );
Serial.println( '*' );
// }
}
getSwitch.ino
// Switch
// Switch 1
void isSwitch1(){
yy = 1;
// Stepper
// Up
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Up");
}
// Switch 2
void isSwitch2(){
yy = 2;
// Stepper
// Down
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Down");
}
// Switch 3
void isSwitch3(){
yy = 3;
// Stepper
// Right
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Right");
}
// Switch 4
void isSwitch4(){
yy = 4;
// Stepper
// Left
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Left");
}
// Switch 5
void isSwitch5(){
yy = 5;
// Stepper
// Stop
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Stop");
}
setup.ino
// Setup
void setup() {
// Open serial port at 9600 baud
Serial.begin( 9600 );
// Pause
delay(5);
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Adafruit RGB LCD Shield
// Set up the LCD's number of columns and rows:
RGBLCDShield.begin(16, 2);
RGBLCDShield.setBacklight(GREEN);
// Display
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("Don Luc Electron"); // Don luc Electron
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print("Robotics"); // Robotics
// Serial
// Serial.println( "Don Luc Electronics");
// Serial.println( "Robotics");
delay(5000);
// Clear
RGBLCDShield.clear();
// Display
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("Version: "); // Version
RGBLCDShield.print( sver );
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print("UID: "); // Unit ID Information
RGBLCDShield.print( uid );
// Serial
// Serial.print( "Software Version Information: ");
// Serial.println( sver );
// Serial.print( "Unit ID Information: ");
// Serial.println( uid );
delay(5000);
// Clear
RGBLCDShield.clear();
}
Arduino UNO – SparkFun RedBoard
SP1 – Digital 3
DI1 – Digital 2
SP2 – Digital 5
DI2 – Digital 4
TX0 – Digital 1
RX0 – Digital 0
VIN – +3.3V
GND – GND
XBee S1: Receiver
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 4076E2C5
CE Coordinator: End Device
BD: 9600
DL2002Mk01Rp.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #12: Robotics - Unmanned Vehicles 1c - Mk07
// 02-01
// DL2002Mk01Rp.ino 12-07
// Arduino UNO - SparkFun RedBoard
// EEPROM with Unique ID
// Receiver
// Breakout Board for XBee Module
// XBee S1
// 2 x EasyDriver
// 2 x Small Stepper
// Include the library code:
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Momentary Button
int yy = "";
// 2 x EasyDriver - 2 x Stepper
int dirPinR = 2; // EasyDriver Right
int stepPinR = 3; // stepPin Right
int dirPinL = 4; // EasyDriver Left
int stepPinL = 5; // stepPin Left
int i = 0;
// Software Version Information
String sver = "12-07";
// Unit ID information
String uid = "";
void loop() {
// Check for serial messages
if ( Serial.available() )
{
isProcessMessage();
}
// Switch
isSwitch();
}
getEEPROM.ino
// EEPROM
// isUID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// ProcessMessage
// isProcessMessage
void isProcessMessage() {
int incb = 0;
String msg = "";
String zzz = "";
// Loop through serial buffer one byte at a time until you reach * which will be end of message
while ( Serial.available() )
{
// Read the incoming byte:
incb = Serial.read();
// Add character to string
msg = msg + char(incb);
// Check if receive character is the end of message *
if ( incb == 42 )
{
// Serial.println(msg);
zzz = msg.charAt( 1 );
// Serial.println(zzz);
yy = zzz.toInt();
// Serial.println( yy );
}
}
}
getStepper.ino
// Stepper
// isStepperSetup
void isStepperSetup() {
// 2 x EasyDriver
pinMode(dirPinR, OUTPUT);
pinMode(stepPinR, OUTPUT);
pinMode(dirPinL, OUTPUT);
pinMode(stepPinL, OUTPUT);
}
// isStepper1
void isStepper1(){
// 2 x EasyDriver - Up
digitalWrite(dirPinR, LOW); // Set the direction.
delay(5);
digitalWrite(dirPinL, LOW); // Set the direction.
delay(5);
for (i = 0; i<300; i++) // Iterate for 1000 microsteps.
{
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinR, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(300); // This delay time is close to top speed.
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(300); // This delay time is close to top speed.
}
}
// isStepper2
void isStepper2(){
// 2 x EasyDriver
digitalWrite(dirPinR, HIGH); // Set the direction.
delay(5);
digitalWrite(dirPinL, HIGH); // Set the direction.
delay(5);
for (i = 0; i<1000; i++) // Iterate for 1000 microsteps.
{
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinR, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(300); // This delay time is close to top speed.
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(300); // This delay time is close to top speed.
}
}
// Switch 3
void isStepper3(){
// Right
// 2 x EasyDriver
digitalWrite(dirPinR, LOW); // Set the direction.
delay(5);
digitalWrite(dirPinL, HIGH); // Set the direction.
delay(5);
for (i = 0; i<300; i++) // Iterate for 1000 microsteps.
{
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinR, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(300); // This delay time is close to top speed.
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(300); // This delay time is close to top speed.
}
}
// Switch 4
void isStepper4(){
// Left
// 2 x EasyDriver
digitalWrite(dirPinR, HIGH); // Set the direction.
delay(5);
digitalWrite(dirPinL, LOW); // Set the direction.
delay(5);
for (i = 0; i<300; i++) // Iterate for 1000 microsteps.
{
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinR, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(300); // This delay time is close to top speed.
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(300); // This delay time is close to top speed.
}
}
// isStepperStop
void isStepperStop() {
// 2 x EasyDriver
digitalWrite(dirPinR, LOW); // Set the direction.
delay(5);
digitalWrite(dirPinL, LOW); // Set the direction.
delay(5);
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
}
getSwitch.ino
// Switch
// isSwitch
void isSwitch(){
switch ( yy ) {
case 1:
// Stepper 1 - Up
isStepper1();
break;
case 2:
// Stepper 2 - Back
isStepper2();
break;
case 3:
// Stepper 3 - Right
isStepper3();
break;
case 4:
// Stepper 4 - Left
isStepper4();
break;
case 5:
// Stepper Stop
isStepperStop();
break;
default:
// Stepper Stop
isStepperStop();
}
}
setup.ino
// Setup
void setup() {
// Open the serial port at 9600 bps:
Serial.begin( 9600 );
// Pause
delay(5);
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Serial
// Serial.print( "Software Version Information: ");
// Serial.println( sver );
// Serial.print( "Unit ID Information: ");
// Serial.println( uid );
// delay(5000);
// 2 x EasyDriver
isStepperSetup();
}
Follow Us
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: http://neosteamlabs.com/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Facebook: https://www.facebook.com/neosteam.labs.9/
Instagram: https://www.instagram.com/neosteamlabs/
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Twitter: https://twitter.com/labs_steam
Etsy: https://www.etsy.com/shop/NeoSteamLabs
Don Luc
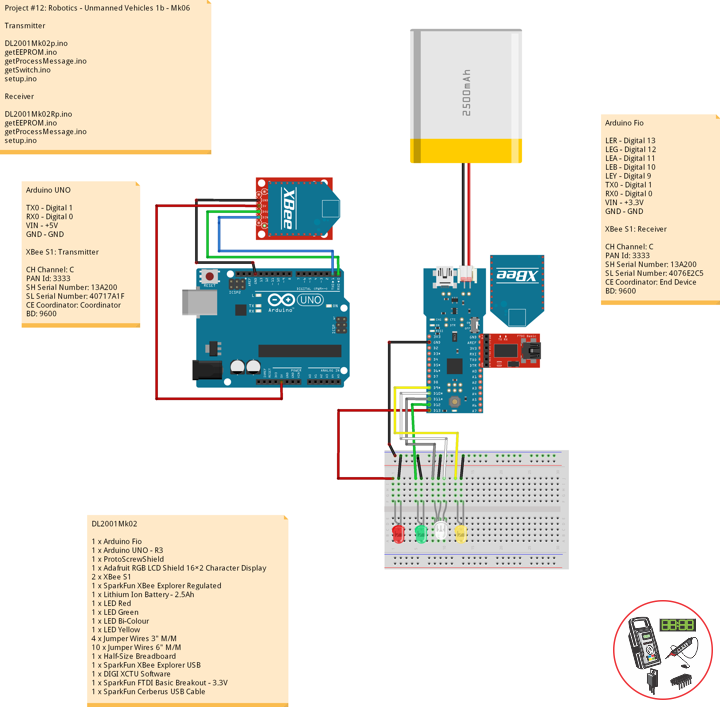
Project #12: Robotics – Unmanned Vehicles 1b – Mk06
——
——
——
——
——
XBee
Digi XBee is the brand name of a family of form factor compatible radio modules from Digi International. The first XBee radios were introduced under the MaxStream brand in 2005 and were based on the IEEE 802.15.4-2003 standard designed for point-to-point and star communications at over-the-air baud rates of 250 kbit/s.
Two models were initially introduced, a lower cost 1 mW XBee and the higher power 100 mW XBee-PRO. Since the initial introduction, a number of new XBee radios have been introduced and an ecosystem of wireless modules, gateways, adapters and software has evolved.
The XBee radios can all be used with the minimum number of connections — power (3.3 V), ground, data in and data out (UART), with other recommended lines being Reset and Sleep. Additionally, most XBee families have some other flow control, input/output (I/O), analog-to-digital converter (A/D) and indicator lines built in.
DL2001Mk02
1 x Arduino Fio
1 x Arduino UNO – R3
1 x ProtoScrewShield
1 x Adafruit RGB LCD Shield 16×2 Character Display
2 x XBee S1
1 x SparkFun XBee Explorer Regulated
1 x Lithium Ion Battery – 2.5Ah
1 x LED Red
1 x LED Green
1 x LED Bi-Colour
1 x LED Yellow
4 x Jumper Wires 3″ M/M
10 x Jumper Wires 6″ M/M
1 x Half-Size Breadboard
1 x SparkFun XBee Explorer USB
1 x DIGI XCTU Software
1 x SparkFun FTDI Basic Breakout – 3.3V
1 x SparkFun Cerberus USB Cable
Arduino UNO
TX0 – Digital 1
RX0 – Digital 0
VIN – +5V
GND – GND
XBee S1: Transmitter
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 40717A1F
CE Coordinator: Coordinator
BD: 9600
DL2001Mk02p.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #12: Robotics - Unmanned Vehicles 1b - Mk06
// 01-02
// DL2001Mk01p.ino 12-06
// Arduino UNO - R3
// ProtoScrewShield
// Adafruit RGB LCD Shield 16×2 Character Display
// EEPROM with Unique ID
// Transmitter
// XBee S1
// Include the library code:
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Adafruit RGB LCD Shield
#include <Adafruit_RGBLCDShield.h>
// Adafruit RGB LCD Shield
Adafruit_RGBLCDShield RGBLCDShield = Adafruit_RGBLCDShield();
// These #defines make it easy to set the backlight color
#define OFF 0x0
#define RED 0x1
#define YELLOW 0x3
#define GREEN 0x2
#define TEAL 0x6
#define BLUE 0x4
#define VIOLET 0x5
#define WHITE 0x7
// Momentary Button
int yy = 0;
uint8_t momentaryButton = 0;
// Communication
unsigned long dTime = 1000;
// The current address in the EEPROM (i.e. which byte we're going to read to next)
// Version
String sver = "12-2.p";
// Unit ID Information
String uid = "";
void loop() {
// Clear
RGBLCDShield.clear();
// set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("Robotics"); // Robotics
// Momentary Button
momentaryButton = RGBLCDShield.readButtons();
switch ( yy ) {
case 1:
// LED Green
isSwitch1();
break;
case 2:
// LED Bipolar (Green)
isSwitch2();
break;
case 3:
// Right
isSwitch3();
break;
case 4:
// Left
isSwitch4();
break;
case 5:
// LED Red
isSwitch5();
break;
default:
// LED Red
yy = 5;
RGBLCDShield.setBacklight(RED);
isSwitch5();
}
if ( momentaryButton ) {
if ( momentaryButton & BUTTON_UP ) {
yy = 1;
// LED Green
RGBLCDShield.setBacklight(GREEN);
}
if ( momentaryButton & BUTTON_DOWN ) {
yy = 2;
// LED Bipolar A
RGBLCDShield.setBacklight(VIOLET);
}
if ( momentaryButton & BUTTON_LEFT ) {
yy = 3;
// LED Bipolar B
RGBLCDShield.setBacklight(TEAL);
}
if ( momentaryButton & BUTTON_RIGHT ) {
yy = 4;
// LED Bipolar A B
RGBLCDShield.setBacklight(YELLOW);
}
if ( momentaryButton & BUTTON_SELECT ) {
yy = 5;
// LED Red
RGBLCDShield.setBacklight(RED);
}
}
// Process Message
isProcessMessage();
delay( dTime );
}
getEEPROM.ino
// EEPROM
// isUID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// ProcessMessage
// isProcessMessage
void isProcessMessage() {
//int incb = 0;
String msg = "";
/// Loop through serial buffer one byte at a time until you reach * which will be end of message
//while ( Serial.available() )
// {
// Print => XBEE + Unit ID + Version + *
msg = "XBEE|" + uid + "|" + sver + "|" + yy + "|*";
Serial.println( msg );
// }
}
getSwitch.ino
// Switch
// Switch 1
void isSwitch1(){
yy = 1;
isSwitchLEDStop();
// LED
// turn LED on:
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Green");
}
// Switch 2
void isSwitch2(){
yy = 2;
isSwitchLEDStop();
// LED
// turn LED on:
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Bi-Colour A");
}
// Switch 3
void isSwitch3(){
yy = 3;
isSwitchLEDStop();
// LED
// turn LED on:
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Bi-Colour B");
}
// Switch 4
void isSwitch4(){
yy = 4;
isSwitchLEDStop();
// LED
// turn LED on:
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Bi-Colour A B");
}
// Switch 5
void isSwitch5(){
yy = 5;
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Stop");
//delay( 250 );
isSwitchLEDStop();
// LED
// turn LED on:
//digitalWrite(iLEDRed, HIGH);
}
void isSwitchLEDStop(){
//digitalWrite(iLEDRed, LOW);
//digitalWrite(iLEDGreen, LOW);
//digitalWrite(iLEDB1, LOW);
//digitalWrite(iLEDB2, LOW);
//digitalWrite(iLEDYellow, LOW);
}
setup.ino
// Setup
void setup() {
//Open serial port at 9600 baud
Serial.begin( 9600 );
// Pause
delay(5);
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Adafruit RGB LCD Shield
// Set up the LCD's number of columns and rows:
RGBLCDShield.begin(16, 2);
RGBLCDShield.setBacklight(GREEN);
// Display
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("Don Luc Electron"); // Don luc Electron
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print("Robotics"); // Robotics
// Serial
Serial.println( "Don Luc Electronics");
Serial.println( "Robotics");
delay(5000);
// Clear
RGBLCDShield.clear();
// Display
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("Version: "); // Version
RGBLCDShield.print( sver );
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print("UID: "); // Unit ID Information
RGBLCDShield.print( uid );
// Serial
Serial.print( "Software Version Information: ");
Serial.println( sver );
Serial.print( "Unit ID Information: ");
Serial.println( uid );
delay(5000);
// Clear
RGBLCDShield.clear();
}
Arduino Fio
LER – Digital 13
LEG – Digital 12
LEA – Digital 11
LEB – Digital 10
LEY – Digital 9
TX0 – Digital 1
RX0 – Digital 0
VIN – +3.3V
GND – GND
XBee S1: Receiver
CH Channel: C
PAN Id: 3333
SH Serial Number: 13A200
SL Serial Number: 4076E2C5
CE Coordinator: End Device
BD: 9600
DL2001Mk02Rp.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #12: Robotics - Unmanned Vehicles 1b - Mk06
// 01-02
// DL2001Mk02Rp.ino 12-06
// Arduino Fio
// SparkFun FTDI Basic Breakout - 3.3V
// EEPROM with Unique ID
// LED Red
// LED Green
// LED Bi-Colour
// LED Yellow
// Lithium Ion Battery - 2.5Ah
// Receiver
// XBee S1
// Include the library code:
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// LED Red
int iLEDRed = 13;
// LED Green
int iLEDGreen = 12;
// LED Bi-Colour
int iLEDBiCoA = 11;
int iLEDBiCoB = 10;
// LED Yellow
int iLEDYellow = 9;
// Momentary Button
int yy = "";
// Software Version Information
String sver = "12-02";
// Unit ID information
String uid = "DR001";
void loop() {
// Check for serial messages
if ( Serial.available() )
{
isProcessMessage();
}
// Switch
isSwitch();
}
getEEPROM.ino
// EEPROM
// isUID
void isUID()
{
// Is Unit ID
uid = "";
for (int x = 0; x < 5; x++)
{
uid = uid + char(EEPROM.read(x));
}
}
getProcessMessage.ino
// ProcessMessage
// isProcessMessage
void isProcessMessage() {
int incb = 0;
String msg = "";
String zzz = "";
// Loop through serial buffer one byte at a time until you reach * which will be end of message
while ( Serial.available() )
{
// Read the incoming byte:
incb = Serial.read();
// Add character to string
msg = msg + char(incb);
// Check if receive character is the end of message *
if ( incb == 42 )
{
Serial.println(msg);
zzz = msg.charAt( 18 );
Serial.println(zzz);
yy = zzz.toInt();
Serial.println( yy );
}
}
}
getSwitch.ino
// Switch
// isSwitch
void isSwitch(){
switch ( yy ) {
case 1:
// LED Green
sLEDStop();
digitalWrite(iLEDGreen, HIGH);
delay( 1000 );
break;
case 2:
// LED Bi-Colour A
sLEDStop();
digitalWrite(iLEDBiCoA, HIGH);
delay( 1000 );
break;
case 3:
// LED Bi-Colour B
sLEDStop();
digitalWrite(iLEDBiCoB, HIGH);
delay( 1000 );
break;
case 4:
// LED Bi-Colour A B
sLEDStop();
digitalWrite(iLEDBiCoA, HIGH);
digitalWrite(iLEDBiCoB, HIGH);
delay( 1000 );
break;
case 5:
// LED Red
sLEDStop();
digitalWrite(iLEDRed, HIGH);
delay( 1000 );
break;
default:
// LED Red
sLEDStop();
digitalWrite(iLEDRed, HIGH);
delay( 1000 );
}
}
// LED Stop
void sLEDStop(){
digitalWrite(iLEDRed, LOW);
digitalWrite(iLEDGreen, LOW);
digitalWrite(iLEDBiCoA, LOW);
digitalWrite(iLEDBiCoB, LOW);
}
setup.ino
// Setup
void setup() {
// Open the serial port at 9600 bps:
Serial.begin( 9600 );
// Pause
delay(5);
// EEPROM Unit ID
isUID();
// Pause
delay(5);
// Serial
Serial.print( "Software Version Information: ");
Serial.println( sver );
Serial.print( "Unit ID Information: ");
Serial.println( uid );
delay(5000);
// LED => OUTPUT
pinMode(iLEDRed, OUTPUT);
pinMode(iLEDGreen, OUTPUT);
pinMode(iLEDBiCoA, OUTPUT);
pinMode(iLEDBiCoB, OUTPUT);
pinMode(iLEDYellow, OUTPUT);
// LED Yellow
digitalWrite(iLEDYellow, HIGH);
}
Follow Us
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: http://neosteamlabs.com/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Facebook: https://www.facebook.com/neosteam.labs.9/
Instagram: https://www.instagram.com/neosteamlabs/
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Twitter: https://twitter.com/labs_steam
Etsy: https://www.etsy.com/shop/NeoSteamLabs
Don Luc
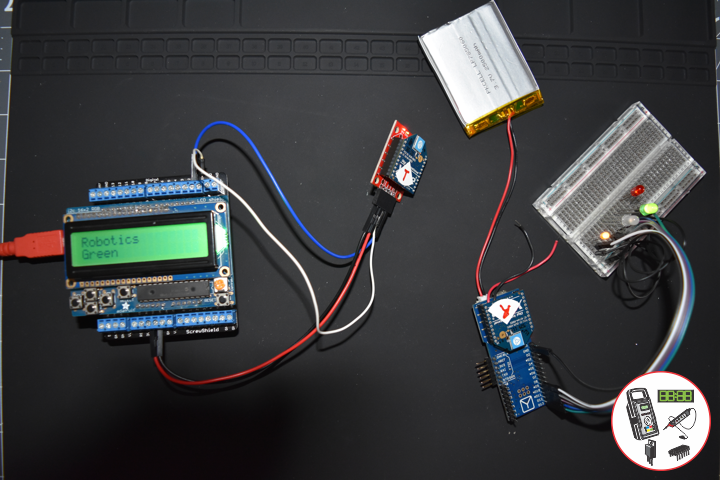
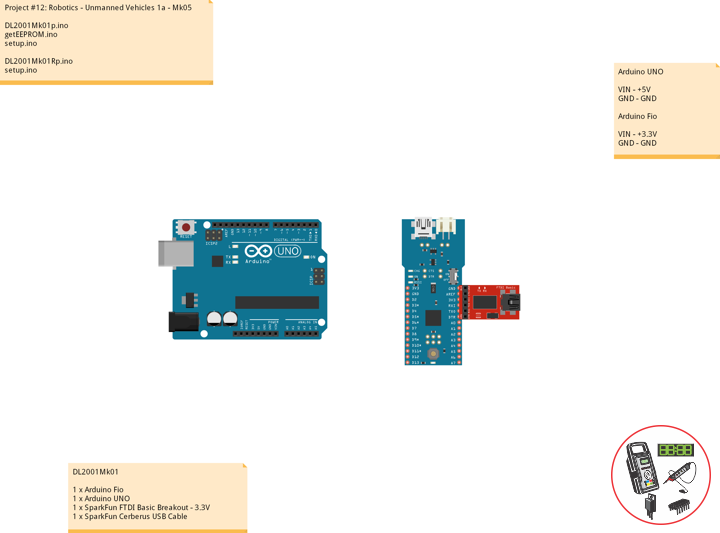
Project #12: Robotics – Unmanned Vehicles 1a – Mk05
——
——
——
——
——
——
——
EEPROM
EEPROM stands for electrically erasable programmable read-only memory and is a type of non-volatile memory used in computers, integrated in microcontrollers for smart cards and remote keyless systems, and other electronic devices to store relatively small amounts of data but allowing individual bytes to be erased and reprogrammed.
Transmitter
In electronics and telecommunications a transmitter or radio transmitter is an electronic device which produces radio waves with an antenna. The transmitter itself generates a radio frequency alternating current, which is applied to the antenna. When excited by this alternating current, the antenna radiates radio waves.
Receiver
A modern communications receiver, used in two-way radio communication stations to talk with remote locations by shortwave radio.
In radio communications, a radio receiver, also known as a receiver, wireless or simply radio is an electronic device that receives radio waves and converts the information carried by them to a usable form. It is used with an antenna. The antenna intercepts radio waves (electromagnetic waves) and converts them to tiny alternating currents which are applied to the receiver, and the receiver extracts the desired information.
DL2001Mk01
1 x Arduino Fio
1 x Arduino UNO
1 x SparkFun FTDI Basic Breakout – 3.3V
1 x SparkFun Cerberus USB Cable
Arduino UNO
VIN – +5V
GND – GND
Arduino Fio
VIN – +3.3V
GND – GND
Transmitter => DT001
DL2001Mk01p.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #12: Robotics - Unmanned Vehicles 1a - Mk05
// 01-01
// DL2001Mk01p.ino 12-05
// Arduino UNO
// Screw Shield
// Adafruit RGB LCD Shield
// EEPROM with Unique ID
// Transmitter
// Include the library code:
#include <Adafruit_RGBLCDShield.h>
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Adafruit RGB LCD Shield
Adafruit_RGBLCDShield RGBLCDShield = Adafruit_RGBLCDShield();
// These #defines make it easy to set the backlight color
#define GREEN 0x2
// Momentary Button
int yy = 0;
uint8_t momentaryButton = 0;
// Software Version Information
String sver = "12-05";
// Unit ID Information
String uid = "DT001";
void loop() {
// Display
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("Don Luc Electron"); // Don luc Electron
momentaryButton = RGBLCDShield.readButtons();
if ( momentaryButton ) {
if ( momentaryButton & BUTTON_UP ) {
isEEPROMw();
yy = 1;
}
if ( momentaryButton & BUTTON_DOWN ) {
isUID();
yy = 2;
}
if ( momentaryButton & BUTTON_LEFT ) {
UIDr();
yy =3;
}
if ( momentaryButton & BUTTON_RIGHT ) {
isEEPROMc();
yy = 4;
}
}
delay(1000);
// Clear
RGBLCDShield.clear();
}
getEEPROM.ino
// getEEPROM
// Write and Read EEPROM with Unique ID for Unit
// Write EEPROM with Unique ID for Unit
void isEEPROMw() {
// set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print( "Write" );
// EEPROM
int incb = 0;
int v = 0;
String msg = "";
String emp = "";
// Set Unit ID
// The message starts with sid then is followed by 5 characters
// First clear a string buffer
emp = "";
// Loop through the 5 ID characters and write their ASCII (byte) value to the EEPROM
for (int x = 0; x < 5; x++)
{
//Get ASCII value of character
v = int(uid.charAt(x)); // + 5));
//Add the actual character to the buffer so we can send it back to the PC
emp = emp + uid.charAt(x + 5);
//Write the value to the EEPROM
EEPROM.write(x, v);
}
delay( 5000 );
}
// Read EEPROM with Unique ID for Unit
void isUID()
{
// Unit ID
String ruid = "";
for (int x = 0; x < 5; x++)
{
ruid = ruid + char(EEPROM.read(x));
}
// set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print( ruid );
delay( 5000 );
}
// Read uid
void UIDr()
{
// set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print( uid );
delay( 5000 );
}
// Clear EEPROM
void isEEPROMc()
{
// Clear EEPROM
for (int i = 0 ; i < EEPROM.length() ; i++) {
EEPROM.write(i, 0);
}
// set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print( "Clear EEPROM" );
delay( 5000 );
}
setup.ino
// Setup
void setup() {
// Adafruit RGB LCD Shield
// Set up the LCD's number of columns and rows:
RGBLCDShield.begin(16, 2);
RGBLCDShield.setBacklight(GREEN);
// Display
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("Don Luc Electron"); // Don luc Electron
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print("Unique ID"); // Unique ID
delay(5000);
// Clear
RGBLCDShield.clear();
}
Receiver => DR001
DL2001Mk01Rp.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #12: Robotics - Unmanned Vehicles 1a - Mk05
// 01-01
// DL2001Mk01Rp.ino 12-05
// Arduino Fio
// SparkFun FTDI Basic Breakout - 3.3V
// EEPROM with Unique ID
// Receiver
// Include the library code:
// EEPROM library to read and write EEPROM with unique ID for unit
#include <EEPROM.h>
// Software Version Information
String sver = "12-05";
// Unit ID information
String uid = "DR001";
void loop() {
// Write EEPROM with Unique ID for Unit
int incb = 0;
int v = 0;
String emp = "";
String ruid = "";
// Set Unit ID
// The message starts with uid then is followed by 5 characters
// First clear a string buffer
emp = "";
// Loop through the 5 ID characters and write their ASCII (byte) value to the EEPROM
for (int y = 0; y < 5; y++)
{
// Get ASCII value of character
v = int(uid.charAt(y)); // + 5));
// Add the actual character to the buffer
emp = emp + uid.charAt(y + 5);
// Write the value to the EEPROM
EEPROM.write(y, v);
}
// Write EEPROM with Unique ID for Unit
Serial.println( "Write ID Information");
// Read ID Information
// Unit ID
for (int y = 0; y < 5; y++)
{
ruid = ruid + char(EEPROM.read(y));
}
// Read ID Information
Serial.print( "Read ID Information: ");
Serial.println( ruid );
Serial.println( "Ok!" );
ruid = "";
delay( 5000 );
}
setup.ino
// Setup
void setup() {
// Open the serial port at 9600 bps:
Serial.begin(9600);
// Serial
Serial.print( "Software Version Information: ");
Serial.println( sver );
Serial.print( "Unit ID Information: ");
Serial.println( uid );
delay(5000);
}
Follow Us
J. Luc Paquin – Curriculum Vitae
https://www.donluc.com/DLHackster/LucPaquinCVEngMk2020a.pdf
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: http://neosteamlabs.com/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Facebook: https://www.facebook.com/neosteam.labs.9/
Instagram: https://www.instagram.com/neosteamlabs/
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Twitter: https://twitter.com/labs_steam
Etsy: https://www.etsy.com/shop/NeoSteamLabs
Don Luc
Project #12: Robotics – 5-Way Switch – Mk04
——
——
——
——
——
——
——
SparkFun 5-Way Tactile Switch Breakout
This 5-way tactile switch (up, down, left, right, and center click) allows for joystick-like control in a very small package.
DL1912Mk03
1 x Adafruit RGB LCD Shield 16×2 Character Display
1 x Arduino UNO – R3
1 x ProtoScrewShield
2 x EasyDriver – Stepper Motor Driver
1 x Small Stepper Motor
1 x Pololu Mounting
1 x Symbol Stepper Motor
2 x RC Servo Motor
2 x Potentiometer 1M Ohm
2 x Knob
2 x LED Red
1 x Rocker Switches
1 x Laser Red
1 x SparkFun 5-Way Tactile Switch Breakout
1 x LED Green
1 x LED Bi-Colour
1 x LED Yellow
17 x Jumper Wires 3″ M/M
31 x Jumper Wires 6″ M/M
4 x Half-Size Breadboard
Arduino UNO
SP1 – Digital 3
DI1 – Digital 2
SP2 – Digital 5
DI2 – Digital 4
SV1 – Digital 6
PO1 – Analog A0
SV2 – Digital 7
PO2 – Analog A1
VIN – +5V
GND – GND
DL1912Mk03.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #12: Robotics - 5-Way Switch - Mk04
// 12-03
// DL1912Mk02p.ino 12-04
// Arduino UNO
// Screw Shield
// Adafruit RGB LCD Shield
// 1 x Small Stepper Motor
// 1 x Symbol Stepper Motor
// 2 x EasyDriver
// 2 x RC Servo Motor
// 2 x Potentiometer
// 2 x LED Red
// 1 x Rocker Switches
// 1 x Laser Red
// 1 x SparkFun 5-Way Tactile Switch Breakout
// 1 x LED Green
// 1 x LED Bi-Colour
// 1 x LED Yellow
// include the library code:
#include <Adafruit_RGBLCDShield.h>
#include <Servo.h>
// Adafruit RGB LCD Shield
Adafruit_RGBLCDShield RGBLCDShield = Adafruit_RGBLCDShield();
// These #defines make it easy to set the backlight color
#define OFF 0x0
#define RED 0x1
#define YELLOW 0x3
#define GREEN 0x2
#define TEAL 0x6
#define BLUE 0x4
#define VIOLET 0x5
#define WHITE 0x7
// Momentary Button
int yy = 0;
uint8_t momentaryButton = 0;
// 2 x EasyDriver
int dirPinR = 2; // EasyDriver Right
int stepPinR = 3; // stepPin Right
int dirPinL = 4; // EasyDriver Left
int stepPinL = 5; // stepPin Left
int i = 0;
// 2 x RC Servo Motor
// 2 x Potentiometer
Servo isRCServo1; // Create servo object to control a RCServo1
int servo1 = 6; // Servo 1
int iPot1 = A0; // Analog Potentiometer 1
int iVal1; // Variable - Analog Potentiometer 1
Servo isRCServo2; // Create servo object to control a RCServo2
int servo2 = 7; // Servo 2
int iPot2 = A1; // Analog Potentiometer 2
int iVal2; // Variable - Analog Potentiometer 2
void loop() {
// Clear
RGBLCDShield.clear();
// Momentary Button
momentaryButton = RGBLCDShield.readButtons();
switch ( yy ) {
case 1:
// Up
isSwitch1();
break;
case 2:
// Down
isSwitch2();
break;
case 3:
// Right
isSwitch3();
break;
case 4:
// Left
isSwitch4();
break;
case 5:
// Stop
isSwitch5();
break;
default:
// Stop
yy = 5;
RGBLCDShield.setBacklight(RED);
isSwitch5();
}
if ( momentaryButton ) {
if ( momentaryButton & BUTTON_UP ) {
yy = 1;
// Up
RGBLCDShield.setBacklight(GREEN);
}
if ( momentaryButton & BUTTON_DOWN ) {
yy = 2;
// Down
RGBLCDShield.setBacklight(VIOLET);
}
if ( momentaryButton & BUTTON_LEFT ) {
yy = 3;
// Right
RGBLCDShield.setBacklight(TEAL);
}
if ( momentaryButton & BUTTON_RIGHT ) {
yy = 4;
// Left
RGBLCDShield.setBacklight(YELLOW);
}
if ( momentaryButton & BUTTON_SELECT ) {
yy = 5;
// Stop
RGBLCDShield.setBacklight(RED);
}
}
}
getServo.ino
// Servo
// isServoSetup
void isServoSetup() {
// 2 x RC Servo Motor
isRCServo1.attach( servo1 );
isRCServo2.attach( servo2 );
}
// isServo1
void isServo1() {
// EasyDriver
isStepperStop();
// Potentiometer RC Servo Motor 1
iVal1 = analogRead( iPot1 ); // Reads the value of the iPot1 (Value between 0 and 1023)
iVal1 = map(iVal1, 0, 1023, 0, 180); // Scale it to use it with the isRCServo1 (Value between 0 and 180)
isRCServo1.write( iVal1 ); // isRCServo1 sets the servo position according to the scaled value
delay(15);
// Display
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("RC Servo 1"); // RC Servo 1
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print( iVal1 ); // Reads the value iVal1
delay(500);
}
// isServo2
void isServo2() {
// EasyDriver
isStepperStop();
// Potentiometer RC Servo Motor 1
iVal2 = analogRead( iPot2 ); // Reads the value of the iPot2 (Value between 0 and 1023)
iVal2 = map(iVal2, 0, 1023, 0, 180); // Scale it to use it with the isRCServo2 (Value between 0 and 180)
isRCServo2.write( iVal2 ); // isRCServo2 sets the servo position according to the scaled value
delay(15);
// Display
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("RC Servo 2"); // RC Servo 2
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print( iVal2 ); // Reads the value iVal2
delay(500);
}
getStepper.ino
// Stepper
// isStepperSetup
void isStepperSetup() {
// 2 x EasyDriver
pinMode(dirPinR, OUTPUT);
pinMode(stepPinR, OUTPUT);
pinMode(dirPinL, OUTPUT);
pinMode(stepPinL, OUTPUT);
}
// isStepper1
void isStepper1(){
// set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
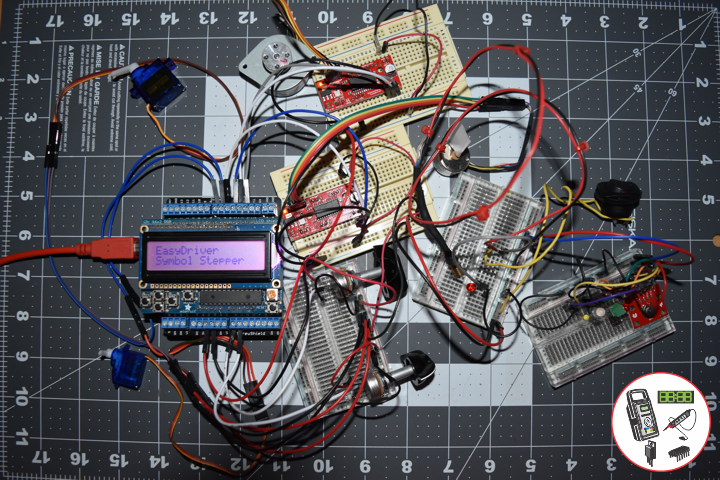
RGBLCDShield.print("EasyDriver"); // EasyDriver
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Small Stepper"); // Small Stepper
delay(500);
// EasyDriver
digitalWrite(dirPinR, LOW); // Set the direction.
delay(100);
for (i = 0; i<300; i++) // Iterate for 1000 microsteps.
{
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinR, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(170); // This delay time is close to top speed.
}
}
// isStepper2
void isStepper2(){
// set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("EasyDriver"); // EasyDriver
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Symbol Stepper"); // Symbol Stepper
delay(500);
// EasyDriver
digitalWrite(dirPinL, HIGH); // Set the direction.
delay(100);
for (i = 0; i<300; i++) // Iterate for 1000 microsteps.
{
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(170); // This delay time is close to top speed.
}
}
// isStepperStop
void isStepperStop() {
// 2 x EasyDriver
digitalWrite(dirPinR, LOW); // Set the direction.
delay(100);
digitalWrite(dirPinL, LOW); // Set the direction.
delay(100);
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
}
getSwitch.ino
// Switch
// Switch 1
void isSwitch1(){
// Small Stepper
yy = 1;
// EasyDriver
isStepper1();
}
// Switch 2
void isSwitch2(){
// Symbol Stepper
yy = 2;
// EasyDriver
isStepper2();
}
// Switch 3
void isSwitch3(){
// RC Servo Motor 1
yy = 3;
// Potentiometer RC Servo Motor 1
isServo1();
}
// Switch 4
void isSwitch4(){
// RC Servo Motor 2
yy = 4;
// Potentiometer RC Servo Motor 2
isServo2();
}
// Switch 5
void isSwitch5(){
// Stop
yy = 5;
// set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
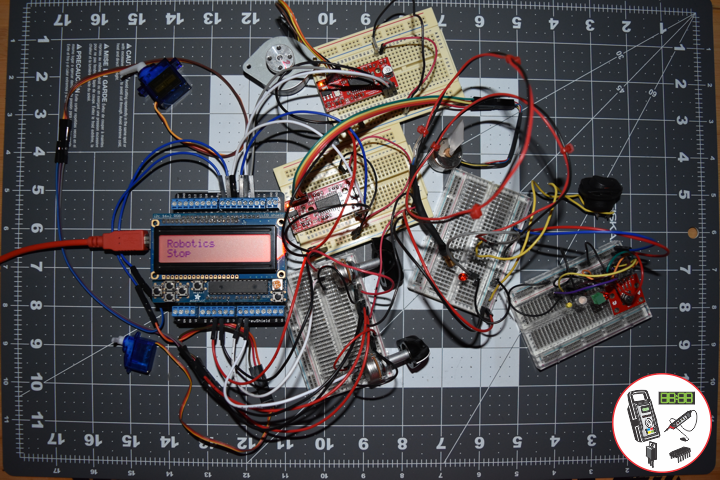
RGBLCDShield.print("Robotics"); // Robotics
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Stop");
delay( 500 );
// EasyDriver
isStepperStop();
}
setup.ino
// Setup
void setup() {
// Adafruit RGB LCD Shield
// Set up the LCD's number of columns and rows:
RGBLCDShield.begin(16, 2);
RGBLCDShield.setBacklight(GREEN);
// Display
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("Don Luc Electron"); // Don luc Electron
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print("Robotics"); // EasyDriver
delay(5000);
// Clear
RGBLCDShield.clear();
// 2 x EasyDriver
isStepperSetup();
// 2 x RC Servo Motor
isServoSetup();
}
Follow Us
Web: https://www.donluc.com/
Web: http://www.jlpconsultants.com/
Web: https://www.donluc.com/DLHackster/
Web: https://www.hackster.io/neosteam-labs
Web: http://neosteamlabs.com/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Facebook: https://www.facebook.com/neosteam.labs.9/
Instagram: https://www.instagram.com/neosteamlabs/
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Twitter: https://twitter.com/labs_steam
Etsy: https://www.etsy.com/shop/NeoSteamLabs
Don Luc
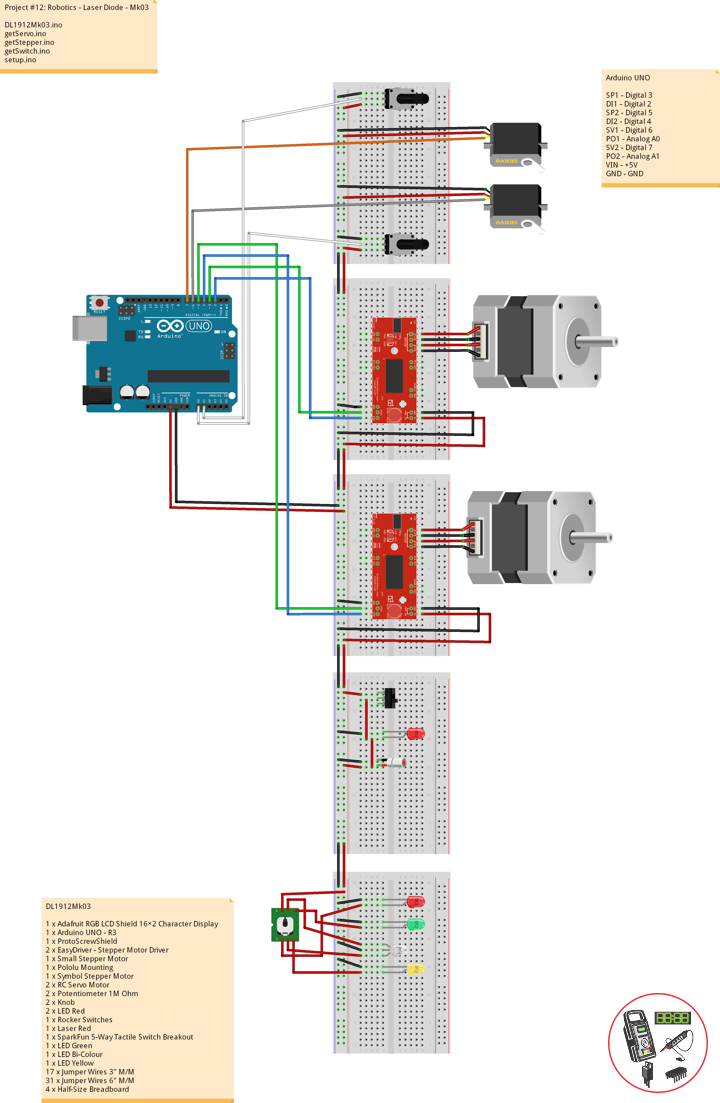
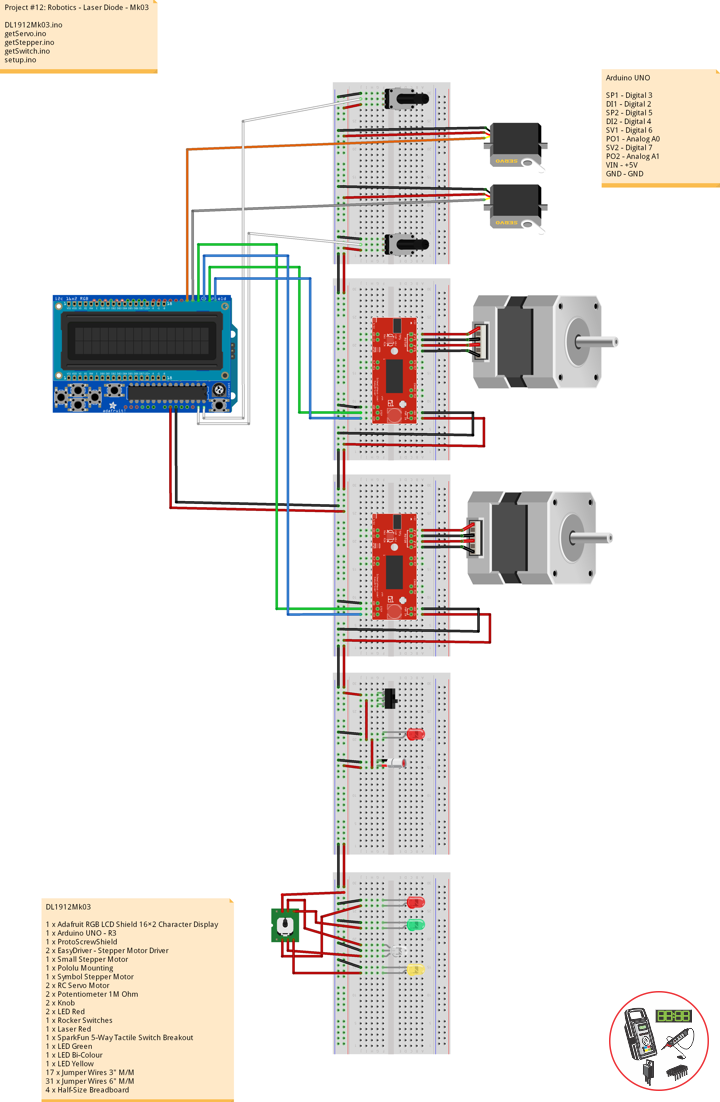
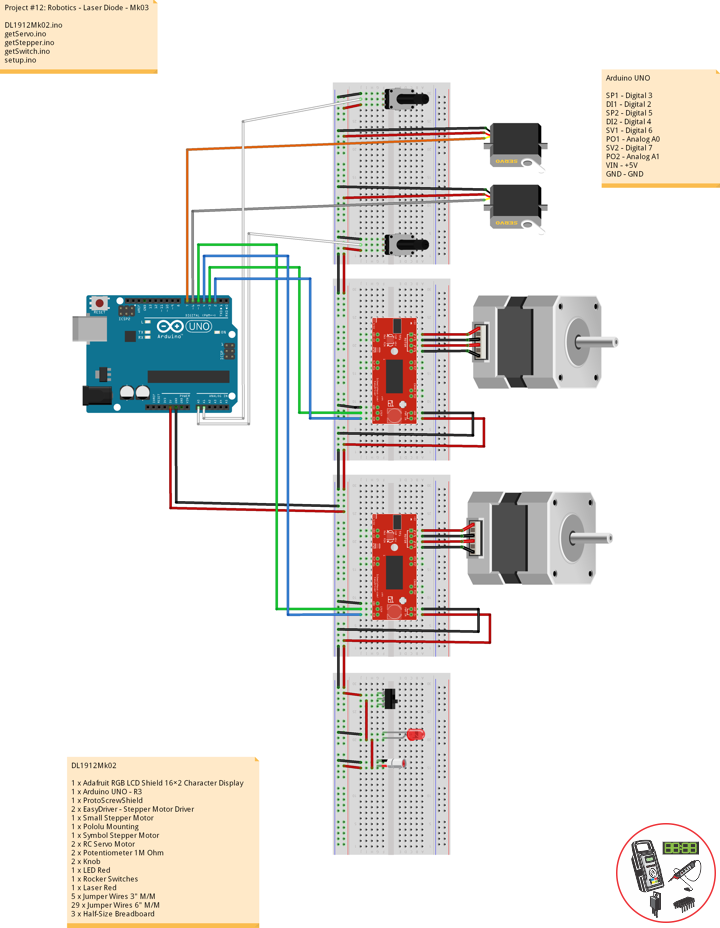
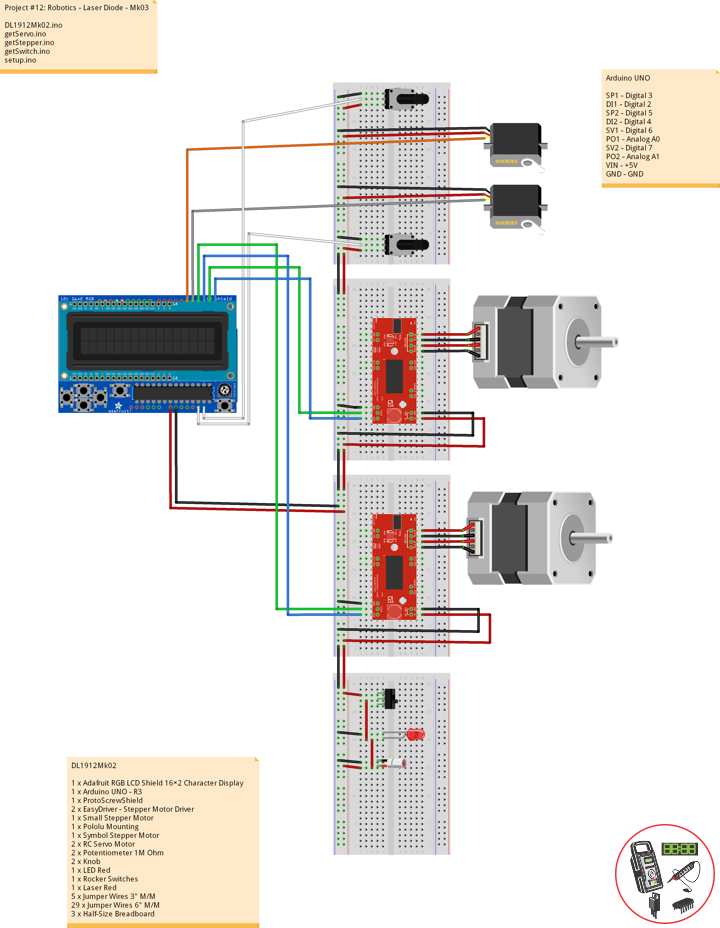
Project #12: Robotics – Laser Diode – Mk03
——
——
——
——
——
——
Laser Diode
A laser diode is a semiconductor device similar to a light-emitting diode in which a diode pumped directly with electrical current can create lasing conditions at the diode’s junction. Laser diodes can directly convert electrical energy into light. Due to the drop of the electron from a higher energy level to a lower one, radiation, in the form of an emitted photon is generated. This is spontaneous emission. Stimulated emission can be produced when the process is continued and further generate light with the same phase, coherence and wavelength.
The choice of the semiconductor material determines the wavelength of the emitted beam, which in today’s laser diodes range from infra-red to the UV spectrum. Laser diodes are the most common type of lasers produced, with a wide range of uses that include fiber optic communications, barcode readers, laser pointers, CD/DVD/Blu-ray disc reading/recording, laser printing, laser scanning and light beam illumination. With the use of a phosphor like that found on white LEDs, Laser diodes can be used for general illumination.
DL1912Mk02
1 x Adafruit RGB LCD Shield 16×2 Character Display
1 x Arduino UNO – R3
1 x ProtoScrewShield
2 x EasyDriver – Stepper Motor Driver
1 x Small Stepper Motor
1 x Pololu Mounting
1 x Symbol Stepper Motor
2 x RC Servo Motor
2 x Potentiometer 1M Ohm
2 x Knob
1 x LED Red
1 x Rocker Switches
1 x Laser Red
5 x Jumper Wires 3″ M/M
29 x Jumper Wires 6″ M/M
3 x Half-Size Breadboard
Arduino UNO
SP1 – Digital 3
DI1 – Digital 2
SP2 – Digital 5
DI2 – Digital 4
SV1 – Digital 6
PO1 – Analog A0
SV2 – Digital 7
PO2 – Analog A1
VIN – +5V
GND – GND
DL1912Mk02.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #12: Robotics - Laser Diode - Mk03
// 12-02
// DL1912Mk02p.ino 12-03
// Arduino UNO
// Screw Shield
// Adafruit RGB LCD Shield
// 1 x Small Stepper Motor
// 1 x Symbol Stepper Motor
// 2 x EasyDriver
// 2 x RC Servo Motor
// 2 x Potentiometer
// 1 x LED Red
// 1 x Rocker Switches
// 1 x Laser Red
// include the library code:
#include <Adafruit_RGBLCDShield.h>
#include <Servo.h>
// Adafruit RGB LCD Shield
Adafruit_RGBLCDShield RGBLCDShield = Adafruit_RGBLCDShield();
// These #defines make it easy to set the backlight color
#define OFF 0x0
#define RED 0x1
#define YELLOW 0x3
#define GREEN 0x2
#define TEAL 0x6
#define BLUE 0x4
#define VIOLET 0x5
#define WHITE 0x7
// Momentary Button
int yy = 0;
uint8_t momentaryButton = 0;
// 2 x EasyDriver
int dirPinR = 2; // EasyDriver Right
int stepPinR = 3; // stepPin Right
int dirPinL = 4; // EasyDriver Left
int stepPinL = 5; // stepPin Left
int i = 0;
// 2 x RC Servo Motor
// 2 x Potentiometer
Servo isRCServo1; // Create servo object to control a RCServo1
int servo1 = 6; // Servo 1
int iPot1 = A0; // Analog Potentiometer 1
int iVal1; // Variable - Analog Potentiometer 1
Servo isRCServo2; // Create servo object to control a RCServo2
int servo2 = 7; // Servo 2
int iPot2 = A1; // Analog Potentiometer 2
int iVal2; // Variable - Analog Potentiometer 2
void loop() {
// Clear
RGBLCDShield.clear();
// Momentary Button
momentaryButton = RGBLCDShield.readButtons();
switch ( yy ) {
case 1:
// Up
isSwitch1();
break;
case 2:
// Down
isSwitch2();
break;
case 3:
// Right
isSwitch3();
break;
case 4:
// Left
isSwitch4();
break;
case 5:
// Stop
isSwitch5();
break;
default:
// Stop
yy = 5;
RGBLCDShield.setBacklight(RED);
isSwitch5();
}
if ( momentaryButton ) {
if ( momentaryButton & BUTTON_UP ) {
yy = 1;
// Up
RGBLCDShield.setBacklight(GREEN);
}
if ( momentaryButton & BUTTON_DOWN ) {
yy = 2;
// Down
RGBLCDShield.setBacklight(VIOLET);
}
if ( momentaryButton & BUTTON_LEFT ) {
yy = 3;
// Right
RGBLCDShield.setBacklight(TEAL);
}
if ( momentaryButton & BUTTON_RIGHT ) {
yy = 4;
// Left
RGBLCDShield.setBacklight(YELLOW);
}
if ( momentaryButton & BUTTON_SELECT ) {
yy = 5;
// Stop
RGBLCDShield.setBacklight(RED);
}
}
}
getServo.ino
// Servo
// isServoSetup
void isServoSetup() {
// 2 x RC Servo Motor
isRCServo1.attach( servo1 );
isRCServo2.attach( servo2 );
}
// isServo1
void isServo1() {
// EasyDriver
isStepperStop();
// Potentiometer RC Servo Motor 1
iVal1 = analogRead( iPot1 ); // Reads the value of the iPot1 (Value between 0 and 1023)
iVal1 = map(iVal1, 0, 1023, 0, 180); // Scale it to use it with the isRCServo1 (Value between 0 and 180)
isRCServo1.write( iVal1 ); // isRCServo1 sets the servo position according to the scaled value
delay(15);
// Display
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("RC Servo 1"); // RC Servo 1
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print( iVal1 ); // Reads the value iVal1
delay(500);
}
// isServo2
void isServo2() {
// EasyDriver
isStepperStop();
// Potentiometer RC Servo Motor 1
iVal2 = analogRead( iPot2 ); // Reads the value of the iPot2 (Value between 0 and 1023)
iVal2 = map(iVal2, 0, 1023, 0, 180); // Scale it to use it with the isRCServo2 (Value between 0 and 180)
isRCServo2.write( iVal2 ); // isRCServo2 sets the servo position according to the scaled value
delay(15);
// Display
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("RC Servo 2"); // RC Servo 2
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print( iVal2 ); // Reads the value iVal2
delay(500);
}
getStepper.ino
// Stepper
// isStepperSetup
void isStepperSetup() {
// 2 x EasyDriver
pinMode(dirPinR, OUTPUT);
pinMode(stepPinR, OUTPUT);
pinMode(dirPinL, OUTPUT);
pinMode(stepPinL, OUTPUT);
}
// isStepper1
void isStepper1(){
// set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("EasyDriver"); // EasyDriver
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Small Stepper"); // Small Stepper
delay(500);
// EasyDriver
digitalWrite(dirPinR, LOW); // Set the direction.
delay(100);
for (i = 0; i<300; i++) // Iterate for 1000 microsteps.
{
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinR, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(170); // This delay time is close to top speed.
}
}
// isStepper2
void isStepper2(){
// set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("EasyDriver"); // EasyDriver
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Symbol Stepper"); // Symbol Stepper
delay(500);
// EasyDriver
digitalWrite(dirPinL, HIGH); // Set the direction.
delay(100);
for (i = 0; i<300; i++) // Iterate for 1000 microsteps.
{
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(170); // This delay time is close to top speed.
}
}
// isStepperStop
void isStepperStop() {
// 2 x EasyDriver
digitalWrite(dirPinR, LOW); // Set the direction.
delay(100);
digitalWrite(dirPinL, LOW); // Set the direction.
delay(100);
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
}
getSwitch.ino
// Switch
// Switch 1
void isSwitch1(){
// Small Stepper
yy = 1;
// EasyDriver
isStepper1();
}
// Switch 2
void isSwitch2(){
// Symbol Stepper
yy = 2;
// EasyDriver
isStepper2();
}
// Switch 3
void isSwitch3(){
// RC Servo Motor 1
yy = 3;
// Potentiometer RC Servo Motor 1
isServo1();
}
// Switch 4
void isSwitch4(){
// RC Servo Motor 2
yy = 4;
// Potentiometer RC Servo Motor 2
isServo2();
}
// Switch 5
void isSwitch5(){
// Stop
yy = 5;
// set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("Robotics"); // Robotics
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Stop");
delay( 500 );
// EasyDriver
isStepperStop();
}
setup.ino
// Setup
void setup() {
// Adafruit RGB LCD Shield
// Set up the LCD's number of columns and rows:
RGBLCDShield.begin(16, 2);
RGBLCDShield.setBacklight(GREEN);
// Display
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("Don Luc Electron"); // Don luc Electron
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print("Robotics"); // EasyDriver
delay(5000);
// Clear
RGBLCDShield.clear();
// 2 x EasyDriver
isStepperSetup();
// 2 x RC Servo Motor
isServoSetup();
}
Follow Us
Web: https://www.donluc.com/
Web: http://neosteamlabs.com/
Web: http://www.jlpconsultants.com/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Facebook: https://www.facebook.com/neosteam.labs.9/
Instagram: https://www.instagram.com/neosteamlabs/
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Twitter: https://twitter.com/labs_steam
Etsy: https://www.etsy.com/shop/NeoSteamLabs
Don Luc
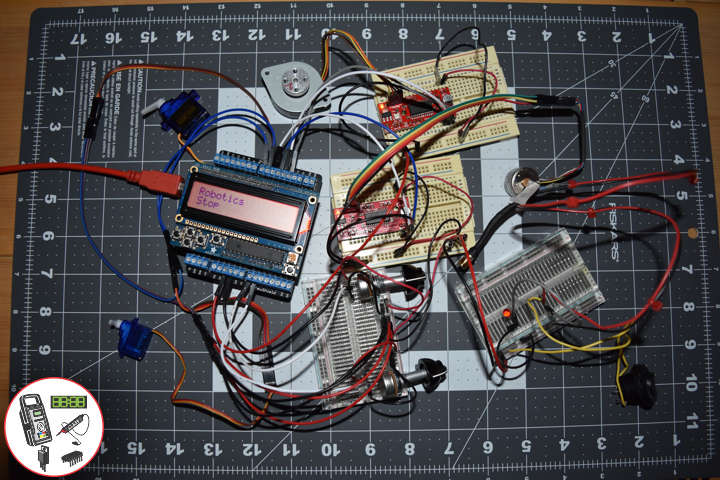
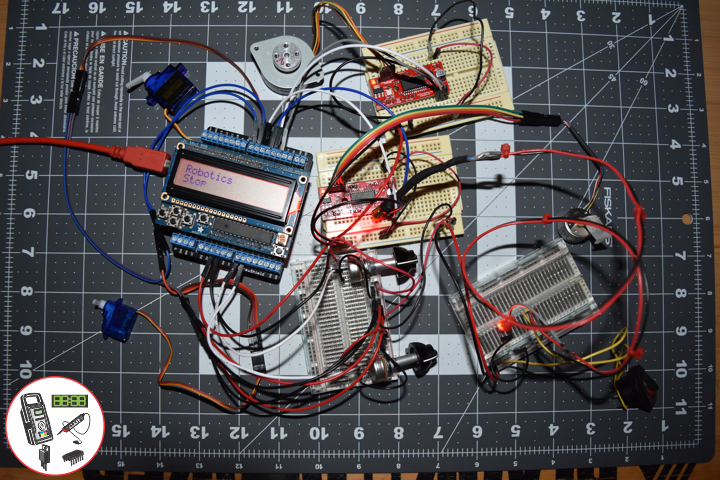
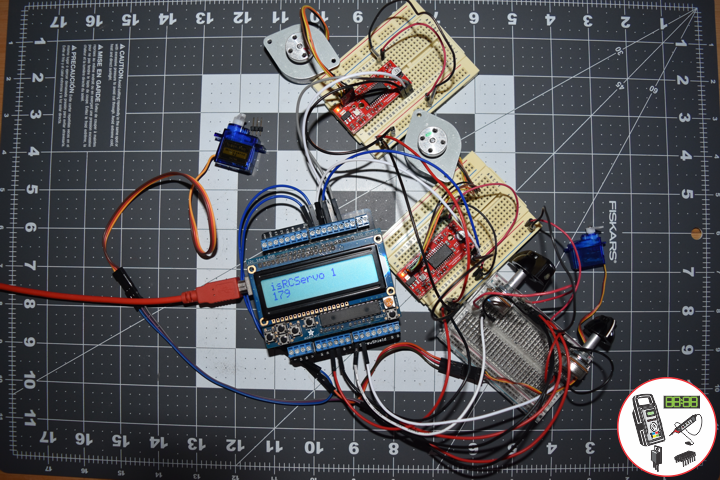
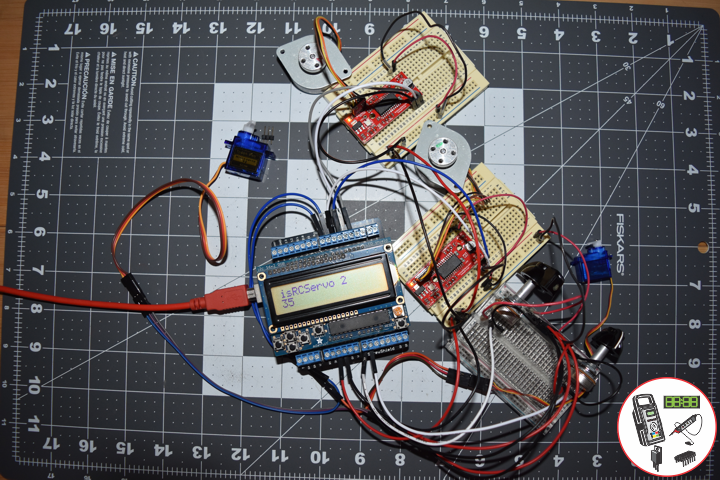
Project #12: Robotics – RC Servo Motor – Mk02
——
——
——
——
——
——
——
——
——
Servo (Radio Control)
Servos (also RC servos) are small, cheap, mass-produced servomotors or other actuators used for radio control and small-scale robotics.
Radio control servos are connected through a standard three-wire connection: two wires for a DC power supply and one for control, carrying a pulse-width modulation (PWM) signal. Each servo has a separate connection and PWM signal from the radio control receiver. This signal is easily generated by simple electronics, or by microcontrollers such as the Arduino. This, together with their low-cost, has led to their wide adoption for robotics and physical computing.
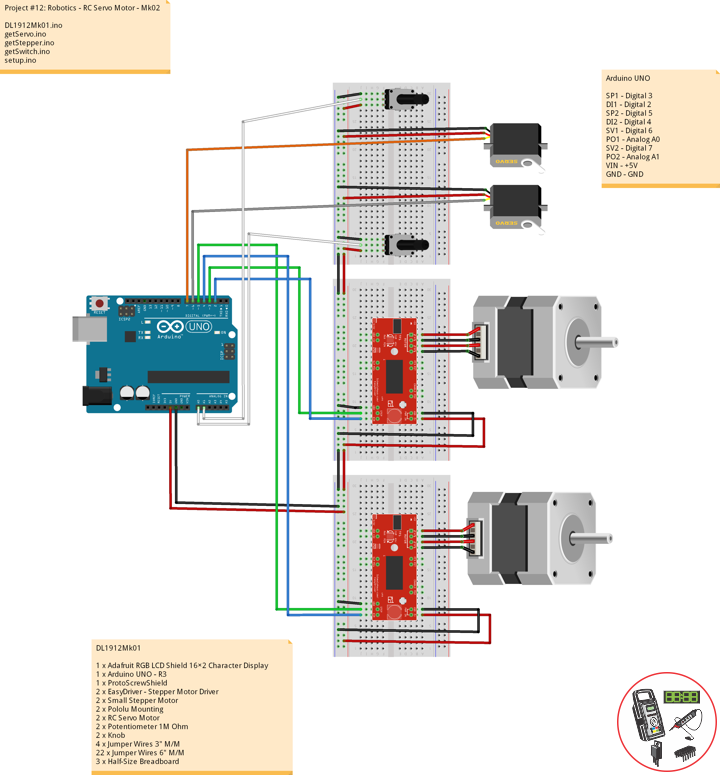
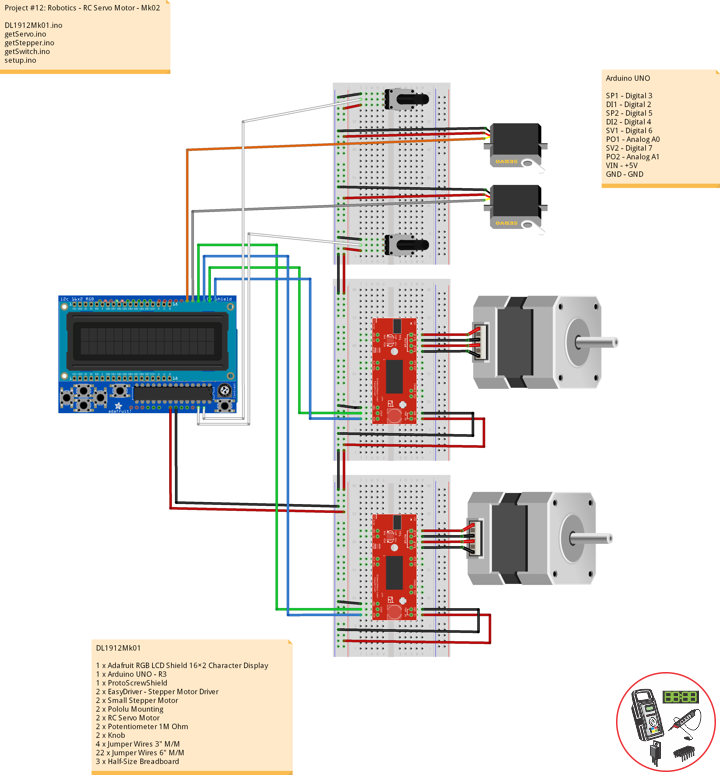
DL1912Mk01
1 x Adafruit RGB LCD Shield 16×2 Character Display
1 x Arduino UNO – R3
1 x ProtoScrewShield
2 x EasyDriver – Stepper Motor Driver
2 x Small Stepper Motor
2 x Pololu Mounting
2 x RC Servo Motor
2 x Potentiometer 1M Ohm
2 x Knob
4 x Jumper Wires 3″ M/M
22 x Jumper Wires 6″ M/M
3 x Half-Size Breadboard
Arduino UNO
SP1 – Digital 3
DI1 – Digital 2
SP2 – Digital 5
DI2 – Digital 4
SV1 – Digital 6
PO1 – Analog A0
SV2 – Digital 7
PO2 – Analog A1
VIN – +5V
GND – GND
DL1912Mk01.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #12: Robotics - RC Servo Motor - Mk02
// 12-01
// DL1912Mk01p.ino 12-02
// Arduino UNO
// Screw Shield
// Adafruit RGB LCD Shield
// 2 x Small Stepper Motor
// 2 x EasyDriver
// 2 x RC Servo Motor
// 2 x Potentiometer
// include the library code:
#include <Adafruit_RGBLCDShield.h>
#include <Servo.h>
// Adafruit RGB LCD Shield
Adafruit_RGBLCDShield RGBLCDShield = Adafruit_RGBLCDShield();
// These #defines make it easy to set the backlight color
#define OFF 0x0
#define RED 0x1
#define YELLOW 0x3
#define GREEN 0x2
#define TEAL 0x6
#define BLUE 0x4
#define VIOLET 0x5
#define WHITE 0x7
// Momentary Button
int yy = 0;
uint8_t momentaryButton = 0;
// 2 x EasyDriver
int dirPinR = 2; // EasyDriver Right
int stepPinR = 3; // stepPin Right
int dirPinL = 4; // EasyDriver Left
int stepPinL = 5; // stepPin Left
int i = 0;
// 2 x RC Servo Motor
// 2 x Potentiometer
Servo isRCServo1; // Create servo object to control a RCServo1
int servo1 = 6; // Servo 1
int iPot1 = A0; // Analog Potentiometer 1
int iVal1; // Variable - Analog Potentiometer 1
Servo isRCServo2; // Create servo object to control a RCServo2
int servo2 = 7; // Servo 2
int iPot2 = A1; // Analog Potentiometer 2
int iVal2; // Variable - Analog Potentiometer 2
void loop() {
// Clear
RGBLCDShield.clear();
// Momentary Button
momentaryButton = RGBLCDShield.readButtons();
switch ( yy ) {
case 1:
// Up
isSwitch1();
break;
case 2:
// Down
isSwitch2();
break;
case 3:
// Right
isSwitch3();
break;
case 4:
// Left
isSwitch4();
break;
case 5:
// Stop
isSwitch5();
break;
default:
// Stop
yy = 5;
RGBLCDShield.setBacklight(RED);
isSwitch5();
}
if ( momentaryButton ) {
if ( momentaryButton & BUTTON_UP ) {
yy = 1;
// Up
RGBLCDShield.setBacklight(GREEN);
}
if ( momentaryButton & BUTTON_DOWN ) {
yy = 2;
// Down
RGBLCDShield.setBacklight(VIOLET);
}
if ( momentaryButton & BUTTON_LEFT ) {
yy = 3;
// Right
RGBLCDShield.setBacklight(TEAL);
}
if ( momentaryButton & BUTTON_RIGHT ) {
yy = 4;
// Left
RGBLCDShield.setBacklight(YELLOW);
}
if ( momentaryButton & BUTTON_SELECT ) {
yy = 5;
// Stop
RGBLCDShield.setBacklight(RED);
}
}
}
getServo.ino
// Servo
// isServoSetup
void isServoSetup() {
// 2 x RC Servo Motor
isRCServo1.attach( servo1 );
isRCServo2.attach( servo2 );
}
// isServo1
void isServo1() {
// EasyDriver
isStepperStop();
// Potentiometer RC Servo Motor 1
iVal1 = analogRead( iPot1 ); // Reads the value of the iPot1 (Value between 0 and 1023)
iVal1 = map(iVal1, 0, 1023, 0, 180); // Scale it to use it with the isRCServo1 (Value between 0 and 180)
isRCServo1.write( iVal1 ); // isRCServo1 sets the servo position according to the scaled value
delay(15);
// Display
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("isRCServo 1"); // isRCServo 1
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print( iVal1 ); // Reads the value iVal1
delay(500);
}
// isServo2
void isServo2() {
// EasyDriver
isStepperStop();
// Potentiometer RC Servo Motor 1
iVal2 = analogRead( iPot2 ); // Reads the value of the iPot2 (Value between 0 and 1023)
iVal2 = map(iVal2, 0, 1023, 0, 180); // Scale it to use it with the isRCServo2 (Value between 0 and 180)
isRCServo2.write( iVal2 ); // isRCServo2 sets the servo position according to the scaled value
delay(15);
// Display
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("isRCServo 2"); // isRCServo 2
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print( iVal2 ); // Reads the value iVal2
delay(500);
}
getStepper.ino
// Stepper
// isStepperSetup
void isStepperSetup() {
// 2 x EasyDriver
pinMode(dirPinR, OUTPUT);
pinMode(stepPinR, OUTPUT);
pinMode(dirPinL, OUTPUT);
pinMode(stepPinL, OUTPUT);
}
// isStepper1
void isStepper1(){
// set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("EasyDriver"); // EasyDriver
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Up");
delay(500);
// 2 x EasyDriver
digitalWrite(dirPinR, LOW); // Set the direction.
delay(100);
digitalWrite(dirPinL, LOW); // Set the direction.
delay(100);
for (i = 0; i<300; i++) // Iterate for 1000 microsteps.
{
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinR, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(170); // This delay time is close to top speed.
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(170); // This delay time is close to top speed.
}
}
// isStepper2
void isStepper2(){
// set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("EasyDriver"); // EasyDriver
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Down");
delay(500);
// 2 x EasyDriver
digitalWrite(dirPinR, HIGH); // Set the direction.
delay(100);
digitalWrite(dirPinL, HIGH); // Set the direction.
delay(100);
for (i = 0; i<300; i++) // Iterate for 1000 microsteps.
{
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinR, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(170); // This delay time is close to top speed.
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(170); // This delay time is close to top speed.
}
}
// isStepperStop
void isStepperStop() {
// 2 x EasyDriver
digitalWrite(dirPinR, LOW); // Set the direction.
delay(100);
digitalWrite(dirPinL, LOW); // Set the direction.
delay(100);
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
}
getSwitch.ino
// Switch
// Switch 1
void isSwitch1(){
// Up
yy = 1;
// 2 x EasyDriver
isStepper1();
}
// Switch 2
void isSwitch2(){
// Down
yy = 2;
// 2 x EasyDriver
isStepper2();
}
// Switch 3
void isSwitch3(){
// Right
yy = 3;
// Potentiometer RC Servo Motor 1
isServo1();
}
// Switch 4
void isSwitch4(){
// Left
yy = 4;
// Potentiometer RC Servo Motor 2
isServo2();
}
// Switch 5
void isSwitch5(){
// Stop
yy = 5;
// set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("Robotics"); // Robotics
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Stop");
delay( 500 );
// EasyDriver
isStepperStop();
}
setup.ino
// Setup
void setup() {
// Adafruit RGB LCD Shield
// Set up the LCD's number of columns and rows:
RGBLCDShield.begin(16, 2);
RGBLCDShield.setBacklight(GREEN);
// Display
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("Don Luc Electron"); // Don luc Electron
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print("Robotics"); // EasyDriver
delay(5000);
// Clear
RGBLCDShield.clear();
// 2 x EasyDriver
isStepperSetup();
// 2 x RC Servo Motor
isServoSetup();
}
Follow Us
Web: https://www.donluc.com/
Web: http://neosteamlabs.com/
Web: http://www.jlpconsultants.com/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Facebook: https://www.facebook.com/neosteam.labs.9/
Instagram: https://www.instagram.com/neosteamlabs/
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Twitter: https://twitter.com/labs_steam
Etsy: https://www.etsy.com/shop/NeoSteamLabs
Don Luc
Project #12: Robotics – EasyDriver – Mk01
——
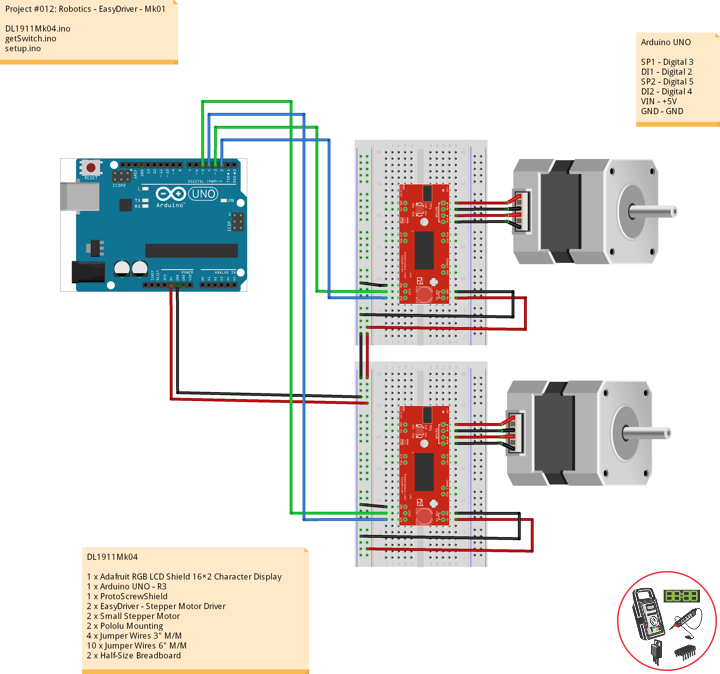
——
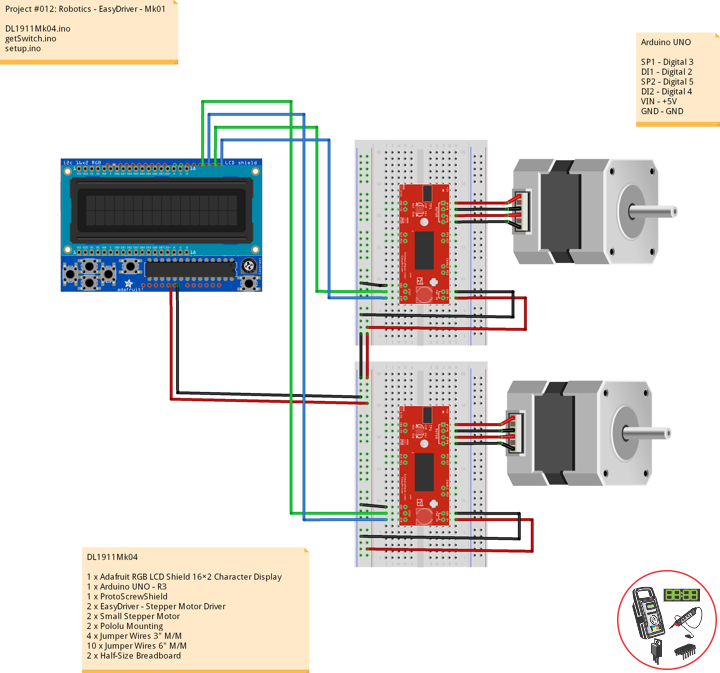
——
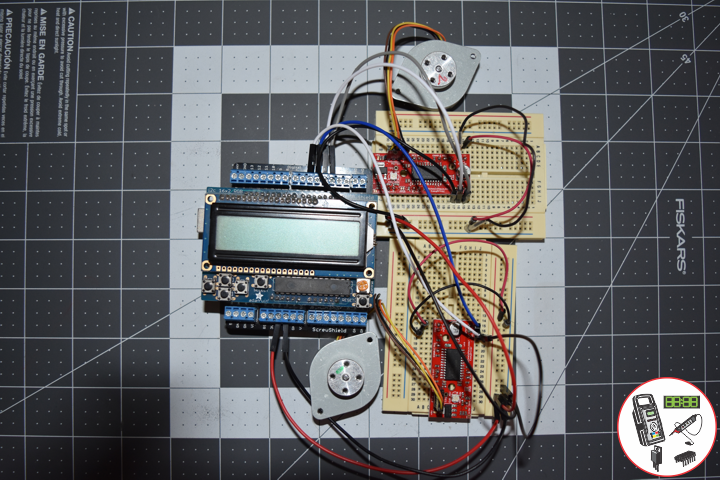
——
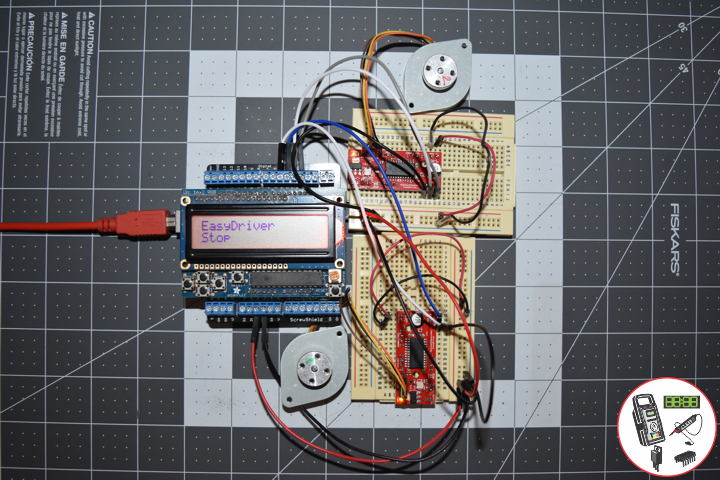
——
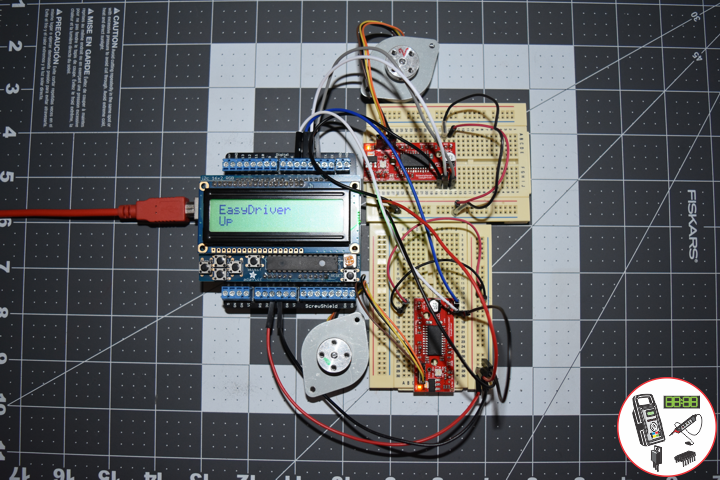
——
Small Stepper Motor
Stepper motors are great motors for position control. They can be found in desktop printers, plotters, 3D printers, CNC milling machines, and anything else requiring precise position control. Steppers are a special segment of brushless motors. They are purposely built for high-holding torque. This high-holding torque gives the user the ability to incrementally “step” to the next position. This results in a simple positioning system that doesn’t require an encoder. This makes stepper motor controllers very simple to build and use. These small steppers are a great way to get things moving, especially when positioning and repeatability is a concern. This is a Bipolar motor.
Pros
Excellent position accuracy
High holding torque
High reliability
Most steppers come in standard sizes
Cons
Small step distance limits top speed
It’s possible to “skip” steps with high loads
Draws maximum current constantly
DL1911Mk04
1 x Adafruit RGB LCD Shield 16×2 Character Display
1 x Arduino UNO – R3
1 x ProtoScrewShield
2 x EasyDriver – Stepper Motor Driver
2 x Small Stepper Motor
2 x Pololu Mounting
4 x Jumper Wires 3″ M/M
10 x Jumper Wires 6″ M/M
2 x Half-Size Breadboard
Arduino UNO
SP1 – Digital 3
DI1 – Digital 2
SP2 – Digital 5
DI2 – Digital 4
VIN – +5V
GND – GND
DL1911Mk04.ino
// ***** Don Luc Electronics © *****
// Software Version Information
// Project #12: Robotics - EasyDriver - Mk01
// 11-04
// DL1911Mk04p.ino 12-01
// Arduino UNO
// Screw Shield
// Adafruit RGB LCD Shield
// 2 x Small Stepper Motor
// 2 x EasyDriver
// include the library code:
#include <Adafruit_RGBLCDShield.h>
// Adafruit RGB LCD Shield
Adafruit_RGBLCDShield RGBLCDShield = Adafruit_RGBLCDShield();
// These #defines make it easy to set the backlight color
#define OFF 0x0
#define RED 0x1
#define YELLOW 0x3
#define GREEN 0x2
#define TEAL 0x6
#define BLUE 0x4
#define VIOLET 0x5
#define WHITE 0x7
// Momentary Button
int yy = 0;
uint8_t momentaryButton = 0;
// 2 x EasyDriver
int dirPinR = 2; // EasyDriver Right
int stepPinR = 3; // stepPin Right
int dirPinL = 4; // EasyDriver Left
int stepPinL = 5; // stepPin Left
int i = 0;
void loop() {
// Clear
RGBLCDShield.clear();
// Momentary Button
momentaryButton = RGBLCDShield.readButtons();
switch ( yy ) {
case 1:
// Up
isSwitch1();
break;
case 2:
// Down
isSwitch2();
break;
case 3:
// Right
isSwitch3();
break;
case 4:
// Left
isSwitch4();
break;
case 5:
// Stop
isSwitch5();
break;
default:
// Stop
yy = 5;
RGBLCDShield.setBacklight(RED);
isSwitch5();
}
if ( momentaryButton ) {
if ( momentaryButton & BUTTON_UP ) {
yy = 1;
// Up
RGBLCDShield.setBacklight(GREEN);
}
if ( momentaryButton & BUTTON_DOWN ) {
yy = 2;
// Down
RGBLCDShield.setBacklight(VIOLET);
}
if ( momentaryButton & BUTTON_LEFT ) {
yy = 3;
// Right
RGBLCDShield.setBacklight(TEAL);
}
if ( momentaryButton & BUTTON_RIGHT ) {
yy = 4;
// Left
RGBLCDShield.setBacklight(YELLOW);
}
if ( momentaryButton & BUTTON_SELECT ) {
yy = 5;
// Stop
RGBLCDShield.setBacklight(RED);
}
}
}
getSwitch.ino
// Switch
// Switch 1
void isSwitch1(){
// Up
yy = 1;
// set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("EasyDriver"); // EasyDriver
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Up");
// 2 x EasyDriver
digitalWrite(dirPinR, LOW); // Set the direction.
delay(100);
digitalWrite(dirPinL, LOW); // Set the direction.
delay(100);
for (i = 0; i<1000; i++) // Iterate for 1000 microsteps.
{
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinR, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(170); // This delay time is close to top speed.
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(170); // This delay time is close to top speed.
}
}
// Switch 2
void isSwitch2(){
// Down
yy = 2;
// set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("EasyDriver"); // EasyDriver
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Down");
// 2 x EasyDriver
digitalWrite(dirPinR, HIGH); // Set the direction.
delay(100);
digitalWrite(dirPinL, HIGH); // Set the direction.
delay(100);
for (i = 0; i<1000; i++) // Iterate for 1000 microsteps.
{
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinR, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(170); // This delay time is close to top speed.
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(170); // This delay time is close to top speed.
}
}
// Switch 3
void isSwitch3(){
// Right
yy = 3;
// set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("EasyDriver"); // EasyDriver
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Hight");
// 2 x EasyDriver
digitalWrite(dirPinR, LOW); // Set the direction.
delay(100);
digitalWrite(dirPinL, HIGH); // Set the direction.
delay(100);
for (i = 0; i<1000; i++) // Iterate for 1000 microsteps.
{
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinR, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(170); // This delay time is close to top speed.
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(170); // This delay time is close to top speed.
}
}
// Switch 4
void isSwitch4(){
// Left
yy = 4;
// set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("EasyDriver"); // EasyDriver
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Left");
// 2 x EasyDriver
digitalWrite(dirPinR, HIGH); // Set the direction.
delay(100);
digitalWrite(dirPinL, LOW); // Set the direction.
delay(100);
for (i = 0; i<1000; i++) // Iterate for 1000 microsteps.
{
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinR, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(170); // This delay time is close to top speed.
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, HIGH); // "Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(170); // This delay time is close to top speed.
}
}
// Switch 5
void isSwitch5(){
// Stop
yy = 5;
// set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("EasyDriver"); // EasyDriver
RGBLCDShield.setCursor(0,1);
RGBLCDShield.print("Stop");
delay( 1000 );
// 2 x EasyDriver
digitalWrite(dirPinR, LOW); // Set the direction.
delay(100);
digitalWrite(dirPinL, LOW); // Set the direction.
delay(100);
digitalWrite(stepPinR, LOW); // This LOW to HIGH change is what creates the
digitalWrite(stepPinL, LOW); // This LOW to HIGH change is what creates the
}
setup.ino
// Setup
void setup() {
// Adafruit RGB LCD Shield
// Set up the LCD's number of columns and rows:
RGBLCDShield.begin(16, 2);
RGBLCDShield.setBacklight(GREEN);
// Display
// Set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print("Don Luc Electron"); // Don luc Electron
// Set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print("EasyDriver"); // EasyDriver
delay(5000);
// Clear
RGBLCDShield.clear();
// 2 x EasyDriver
pinMode(dirPinR, OUTPUT);
pinMode(stepPinR, OUTPUT);
pinMode(dirPinL, OUTPUT);
pinMode(stepPinL, OUTPUT);
}
Follow Us
Web: https://www.donluc.com/
Web: http://neosteamlabs.com/
Web: http://www.jlpconsultants.com/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Facebook: https://www.facebook.com/neosteam.labs.9/
Instagram: https://www.instagram.com/neosteamlabs/
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Twitter: https://twitter.com/labs_steam
Etsy: https://www.etsy.com/shop/NeoSteamLabs
Don Luc