Radio Frequency
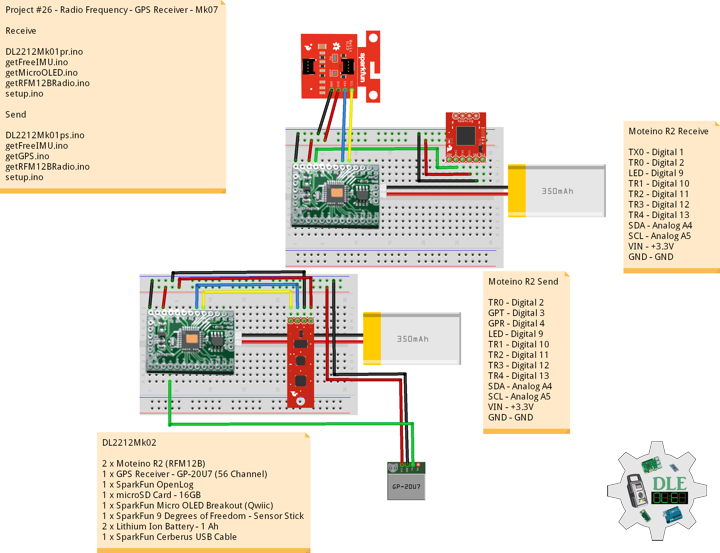
Project #26 – Radio Frequency – GPS Receiver – Mk07
——
#DonLucElectronics #DonLuc #RadioFrequency #Moteino #Send #Receive #GPSReceiver #OpenLog #Display #FreeIMU #Magnetometer #Accelerometer #Gyroscope #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
GPS Receiver – GP-20U7 (56 Channel)
The GP-20U7 is a compact GPS receiver with a built-in high performances all-in-one GPS chipset. The GP-20U7 accurately provides position, velocity, and time readings as well possessing high sensitivity and tracking capabilities. Thanks to the low power consumption this receiver requires, the GP-20U7 is ideal for portable applications such as tablet PCs, smart phones, and other devices requiring positioning capability.
This 56-channel GPS module, that supports a standard NMEA-0183 and uBlox 7 protocol, has low power consumption of 40mA@3.3V (Max), an antenna on board, and -162dBm tracking sensitivity. With 56 channels in search mode and 22 channels “All-In-View” tracking, the GP-20U7 is quite the work horse for its size.
DL2212Mk02
2 x Moteino R2 (RFM12B)
1 x GPS Receiver – GP-20U7 (56 Channel)
1 x SparkFun OpenLog
1 x microSD Card – 16GB
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom – Sensor Stick
2 x Lithium Ion Battery – 1 Ah
1 x SparkFun Cerberus USB Cable
Moteino R2 (Receive)
TX0 – Digital 1
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2212Mk02pr.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - GPS Receiver - Mk07
26-07
Receive
DL2212Mk02pr.ino
2 x Moteino R2 (RFM12B)
1 x GPS Receiver - GP-20U7 (56 Channel)
1 x SparkFun OpenLog
1 x microSD Card - 16GB
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
2 x Lithium Ion Battery - 1Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// SparkFun Micro OLED
#include <SFE_MicroOLED.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 1
// The network ID we are on
#define NETWORKID 99
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Process Message
// Message
String msg = "";
int firstClosingBracket = 0;
// Yaw Pitch Roll
String sYaw = "";
String sPitch = "";
String sRoll = "";
float Yaw = 0;
float Pitch = 0;
float Roll = 0;
// LED
int iLED = 9;
// SparkFun Micro OLED
#define PIN_RESET 9
#define DC_JUMPER 1
// I2C declaration
MicroOLED oled(PIN_RESET, DC_JUMPER);
// Software Version Information
String sver = "26-07";
void loop() {
// is RFM12B Radio
isRFM12BRadio();
// Micro OLED
isMicroOLED();
}
getFreeIMU.ino
// FreeIMU
// isFreeIMU
void isFreeIMU(){
// FreeIMU
// msg = "<IMU|Yaw|Pitch|Roll|GPS Status|Latitude|Longitude|Date|Time|*"
// msg = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|" + GPSSt
// + "|" + TargetLat + "|" TargetLon + "|" + TargetDat +"|" + TargetTim + "|*"
firstClosingBracket = 0;
// "<IMU|"
firstClosingBracket = msg.indexOf('|');
msg.remove(0, 5);
// Yaw
firstClosingBracket = msg.indexOf('|');
sYaw = msg;
sYaw.remove(firstClosingBracket);
Yaw = sYaw.toFloat();
// Pitch
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
sPitch = msg;
sPitch.remove(firstClosingBracket);
Pitch = sPitch.toFloat();
// Roll
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
sRoll = msg;
sRoll.remove(firstClosingBracket);
Roll = sRoll.toFloat();
}
getMicroOLED.ino
// SparkFun Micro OLED
// Setup Micro OLED
void isSetupMicroOLED() {
// Initialize the OLED
oled.begin();
// Clear the display's internal memory
oled.clear(ALL);
// Display what's in the buffer (splashscreen)
oled.display();
// Delay 1000 ms
delay(1000);
// Clear the buffer.
oled.clear(PAGE);
}
// Micro OLED
void isMicroOLED() {
// Text Display FreeIMU
// Clear the display
oled.clear(PAGE);
// Set cursor to top-left
oled.setCursor(0, 0);
// Set font to type 0
oled.setFontType(0);
// FreeIMU
oled.print("FreeIMU");
oled.setCursor(0, 12);
// Yaw
oled.print("Y: ");
oled.print(Yaw);
oled.setCursor(0, 25);
// Pitch
oled.print("P: ");
oled.print(Pitch);
oled.setCursor(0, 39);
// Roll
oled.print("R: ");
oled.print(Roll);
oled.display();
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio()
{
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Transmitting
}
// is RFM12 BRadio
void isRFM12BRadio()
{
// Receive
if (radio.ReceiveComplete())
{
// CRC Pass
if (radio.CRCPass())
{
// Message
msg = "";
// Can also use radio.GetDataLen() if you don't like pointers
for (byte i = 0; i < *radio.DataLen; i++)
{
//Serial.print((char)radio.Data[i]);
msg = msg + (char)radio.Data[i];
}
// Serial
Serial.println( msg );
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// FreeIMU
// Yaw Pitch Roll
isFreeIMU();
// ACK Requested
if (radio.ACKRequested())
{
// Send ACK
radio.SendACK();
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
}
else
{
// BAD-CRC
}
}
}
setup.ino
// Setup
void setup()
{
// Serial
Serial.begin(SERIAL_BAUD);
// Give display time to power on
delay(100);
// Set up I2C bus
Wire.begin();
// Setup Micro OLED
isSetupMicroOLED();
// LED
pinMode( iLED , OUTPUT);
// RFM12B Radio
isSetupRFM12BRadio();
}
——
Moteino R2 (Send)
TR0 – Digital 2
GPT – Digital 3
GPR – Digital 4
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2212Mk02ps.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - GPS Receiver - Mk07
26-07
Send
DL2212Mk02ps.ino
2 x Moteino R2 (RFM12B)
1 x GPS Receiver - GP-20U7 (56 Channel)
1 x SparkFun OpenLog
1 x microSD Card - 16GB
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
2 x Lithium Ion Battery - 1Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Sleep
#include <avr/sleep.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// Includes and variables for IMU integration
// Accelerometer
#include <ADXL345.h>
// Magnetometer
#include <HMC58X3.h>
// MEMS Gyroscope
#include <ITG3200.h>
// Debug
#include "DebugUtils.h"
// FreeIMU
#include <CommunicationUtils.h>
#include <FreeIMU.h>
// GPS Receiver
#include <TinyGPS++.h>
// Software Serial
#include <SoftwareSerial.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 2
// The network ID we are on
#define NETWORKID 99
// The node ID we're sending to
#define GATEWAYID 1
// # of ms to wait for an ack
#define ACK_TIME 50
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Wait this many ms between sending packets
int interPacketDelay = 1000;
// Input
char input = 0;
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Send Size
byte sendSize = 0;
// Payload
char payload[100];
// Request ACK
bool requestACK = false;
// LED
int iLED = 9;
// Set the FreeIMU object
FreeIMU my3IMU = FreeIMU();
// Yaw Pitch Roll
String zzzzzz = "";
String sYaw = "";
String sPitch = "";
String sRoll = "";
float ypr[3];
float Yaw = 0;
float Pitch = 0;
float Roll = 0;
// GPS Receiver
#define gpsRXPIN 4
// This one is unused and doesnt have a conection
#define gpsTXPIN 3
// The TinyGPS++ object
TinyGPSPlus gps;
// Latitude
float TargetLat;
String sLat = "";
// Longitude
float TargetLon;
String sLon = "";
// GPS Date, Time
// GPS Date
String TargetDat;
// GPS Time
String TargetTim;
// GPS Status
String GPSSt = "";
// The serial connection to the GPS device
SoftwareSerial tGPS(gpsRXPIN, gpsTXPIN);
// Software Version Information
String sver = "26-07";
void loop()
{
// isGPS
isGPS();
// isFreeIMU
isFreeIMU();
// is RFM12B Radio
isRFM12BRadio();
// Inter Packet Delay
delay(interPacketDelay);
}
getFreeIMU.ino
// FreeIMU
// isFreeIMU
void isFreeIMU(){
// FreeIMU
// Yaw Pitch Roll
my3IMU.getYawPitchRoll(ypr);
// Yaw
Yaw = ypr[0];
// Pitch
Pitch = ypr[1];
// Roll
Roll = ypr[2];
}
getGPS.ino
// GPS Receiver
// Setup GPS
void setupGPS() {
// Setup GPS
tGPS.begin( 9600 );
}
// isGPS
void isGPS(){
// Receives NEMA data from GPS receiver
// This sketch displays information every time a new sentence is correctly encoded
while ( tGPS.available() > 0)
if (gps.encode( tGPS.read() ))
{
// GPS Vector Pointer Target
displayInfo();
// GPS Date, Time
displayDTS();
}
if (millis() > 5000 && gps.charsProcessed() < 10)
{
while(true);
}
}
// GPS Vector Pointer Target
void displayInfo(){
// Location
if (gps.location.isValid())
{
// Latitude
TargetLat = gps.location.lat();
// Longitude
TargetLon = gps.location.lng();
// GPS Status 2
GPSSt = "Yes";
}
else
{
// GPS Status 0
GPSSt = "No";
}
}
// GPS Date, Time
void displayDTS(){
// Date
TargetDat = "";
if (gps.date.isValid())
{
// Date
// Year
TargetDat += String(gps.date.year(), DEC);
TargetDat += "/";
// Month
TargetDat += String(gps.date.month(), DEC);
TargetDat += "/";
// Day
TargetDat += String(gps.date.day(), DEC);
}
// Time
TargetTim = "";
if (gps.time.isValid())
{
// Time
// Hour
TargetTim += String(gps.time.hour(), DEC);
TargetTim += ":";
// Minute
TargetTim += String(gps.time.minute(), DEC);
TargetTim += ":";
// Secound
TargetTim += String(gps.time.second(), DEC);
}
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio(){
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Sleep right away to save power
radio.Sleep();
// Transmitting
Serial.println("Transmitting...\n\n");
}
// is RFM12 BRadio
void isRFM12BRadio(){
// sYaw, sPitch, sRoll ""
sYaw = "";
sPitch = "";
sRoll = "";
// Latitude and Longitude
sLat = "";
sLon = "";
// sYaw, sPitch, sRoll concat
sYaw.concat(Yaw);
sPitch.concat(Pitch);
sRoll.concat(Roll);
// Latitude and Longitude
sLat.concat( TargetLat );
sLon.concat( TargetLon );
// zzzzzz ""
zzzzzz = "";
// zzzzzz = "<IMU|Yaw|Pitch|Roll|GPS Status|Latitude|Longitude|Date|Time|*"
// zzzzzz = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|" + GPSSt
// + "|" + TargetLat + "|" TargetLon + "|" + TargetDat +"|" + TargetTim + "|*"
zzzzzz = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|" + GPSSt + "|"
+ sLat + "|" + sLon + "|" + TargetDat + "|" + TargetTim + "|*";
// sendSize Length
sendSize = zzzzzz.length();
// sendSize
payload[sendSize];
// sendSize, charAt
for(byte i = 0; i < sendSize+1; i++){
payload[i] = zzzzzz.charAt(i);
}
// payload
Serial.print(payload);
// Request ACK
requestACK = sendSize;
// Wakeup
radio.Wakeup();
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// Send
radio.Send(GATEWAYID, payload, sendSize, requestACK);
// Request ACK
if (requestACK)
{
Serial.print(" - waiting for ACK...");
if (waitForAck()){
Serial.print("Ok!");
}
else Serial.print("nothing...");
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
// Sleep
radio.Sleep();
// Serial
Serial.println();
}
// Wait a few milliseconds for proper ACK, return true if received
static bool waitForAck(){
// Now
long now = millis();
// ACK
while (millis() - now <= ACK_TIME){
if (radio.ACKReceived(GATEWAYID)){
return true;
}
}
return false;
}
setup.ino
// Setup
void setup(){
// Serial
Serial.begin(SERIAL_BAUD);
// GPS Receiver
// Setup GPS
setupGPS();
// LED
pinMode( iLED , OUTPUT);
// Set up I2C bus
Wire.begin();
// RFM12B Radio
isSetupRFM12BRadio();
// Pause
delay(5);
// Initialize IMU
my3IMU.init();
// Pause
delay(5);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
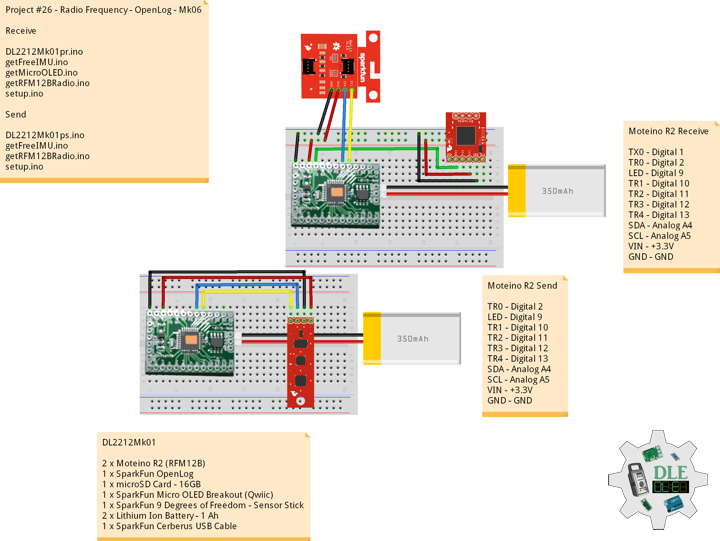
Project #26 – Radio Frequency – OpenLog – Mk06
——
#DonLucElectronics #DonLuc #RadioFrequency #Moteino #Send #Receive #OpenLog #Display #FreeIMU #Magnetometer #Accelerometer #Gyroscope #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
SparkFun OpenLog
The SparkFun OpenLog is an open source data logger that works over a simple serial connection and supports microSD cards up to 32GB. The OpenLog can store or “Log” huge amounts of serial data and act as a black box of sorts to store all the serial data that your project generates, for scientific or debugging purposes.
The SparkFun OpenLog uses an ATmega328 running at 16MHz thanks to the onboard resonator. The OpenLog draws approximately 2-3mA in idle mode. During a full record OpenLog can draw 10 to 20mA depending on the microSD card being used.
All data logged by the OpenLog is stored on the microSD card. Any 512MB to 32GB microSD card should work. OpenLog supports both FAT16 and FAT32 SD formats.
DL2212Mk01
2 x Moteino R2 (RFM12B)
1 x SparkFun OpenLog
1 x microSD Card – 16GB
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom – Sensor Stick
2 x Lithium Ion Battery – 1 Ah
1 x SparkFun Cerberus USB Cable
Moteino R2 (Receive)
TX0 – Digital 1
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2212Mk01pr.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - OpenLog - Mk06
26-06
Receive
DL2212Mk01pr.ino
2 x Moteino R2 (RFM12B)
1 x SparkFun OpenLog
1 x microSD Card - 16GB
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
2 x Lithium Ion Battery - 1Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// SparkFun Micro OLED
#include <SFE_MicroOLED.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 1
// The network ID we are on
#define NETWORKID 99
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Process Message
// Message
String msg = "";
int firstClosingBracket = 0;
// Yaw Pitch Roll
String sYaw = "";
String sPitch = "";
String sRoll = "";
float Yaw = 0;
float Pitch = 0;
float Roll = 0;
// LED
int iLED = 9;
// SparkFun Micro OLED
#define PIN_RESET 9
#define DC_JUMPER 1
// I2C declaration
MicroOLED oled(PIN_RESET, DC_JUMPER);
// Software Version Information
String sver = "26-06";
void loop() {
// is RFM12B Radio
isRFM12BRadio();
// Micro OLED
isMicroOLED();
}
getFreeIMU.ino
// FreeIMU
// isFreeIMU
void isFreeIMU(){
// FreeIMU
// IMU Yaw Pitch Roll
// msg = "<IMU|1000|1000|1000|*";
// msg = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*"
firstClosingBracket = 0;
// "<IMU|"
firstClosingBracket = msg.indexOf('|');
msg.remove(0, 5);
// Yaw
firstClosingBracket = msg.indexOf('|');
sYaw = msg;
sYaw.remove(firstClosingBracket);
Yaw = sYaw.toFloat();
// Pitch
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
sPitch = msg;
sPitch.remove(firstClosingBracket);
Pitch = sPitch.toFloat();
// Roll
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
sRoll = msg;
sRoll.remove(firstClosingBracket);
Roll = sRoll.toFloat();
}
getMicroOLED.ino
// SparkFun Micro OLED
// Setup Micro OLED
void isSetupMicroOLED() {
// Initialize the OLED
oled.begin();
// Clear the display's internal memory
oled.clear(ALL);
// Display what's in the buffer (splashscreen)
oled.display();
// Delay 1000 ms
delay(1000);
// Clear the buffer.
oled.clear(PAGE);
}
// Micro OLED
void isMicroOLED() {
// Text Display FreeIMU
// Clear the display
oled.clear(PAGE);
// Set cursor to top-left
oled.setCursor(0, 0);
// Set font to type 0
oled.setFontType(0);
// FreeIMU
oled.print("FreeIMU");
oled.setCursor(0, 12);
// Yaw
oled.print("Y: ");
oled.print(Yaw);
oled.setCursor(0, 25);
// Pitch
oled.print("P: ");
oled.print(Pitch);
oled.setCursor(0, 39);
// Roll
oled.print("R: ");
oled.print(Roll);
oled.display();
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio()
{
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Transmitting
}
// is RFM12 BRadio
void isRFM12BRadio()
{
// Receive
if (radio.ReceiveComplete())
{
// CRC Pass
if (radio.CRCPass())
{
// Message
msg = "";
// Can also use radio.GetDataLen() if you don't like pointers
for (byte i = 0; i < *radio.DataLen; i++)
{
//Serial.print((char)radio.Data[i]);
msg = msg + (char)radio.Data[i];
}
// Serial
Serial.println( msg );
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// FreeIMU
// Yaw Pitch Roll
isFreeIMU();
// ACK Requested
if (radio.ACKRequested())
{
// Send ACK
radio.SendACK();
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
}
else
{
// BAD-CRC
}
}
}
setup.ino
// Setup
void setup()
{
// Serial
Serial.begin(SERIAL_BAUD);
// Give display time to power on
delay(100);
// Set up I2C bus
Wire.begin();
// Setup Micro OLED
isSetupMicroOLED();
// LED
pinMode( iLED , OUTPUT);
// RFM12B Radio
isSetupRFM12BRadio();
}
——
Moteino R2 (Send)
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2212Mk01ps.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - OpenLog - Mk06
26-06
Send
DL2212Mk01ps.ino
2 x Moteino R2 (RFM12B)
1 x SparkFun OpenLog
1 x microSD Card - 16GB
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
2 x Lithium Ion Battery - 1Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Sleep
#include <avr/sleep.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// Includes and variables for IMU integration
// Accelerometer
#include <ADXL345.h>
// Magnetometer
#include <HMC58X3.h>
// MEMS Gyroscope
#include <ITG3200.h>
// Debug
#include "DebugUtils.h"
// FreeIMU
#include <CommunicationUtils.h>
#include <FreeIMU.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 2
// The network ID we are on
#define NETWORKID 99
// The node ID we're sending to
#define GATEWAYID 1
// # of ms to wait for an ack
#define ACK_TIME 50
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Wait this many ms between sending packets
int interPacketDelay = 1000;
// Input
char input = 0;
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Send Size
byte sendSize = 0;
// Payload
char payload[100];
// Request ACK
bool requestACK = false;
// LED
int iLED = 9;
// Set the FreeIMU object
FreeIMU my3IMU = FreeIMU();
// Yaw Pitch Roll
String zzzzzz = "";
String sYaw = "";
String sPitch = "";
String sRoll = "";
float ypr[3];
float Yaw = 0;
float Pitch = 0;
float Roll = 0;
// Software Version Information
String sver = "26-06";
void loop()
{
// isFreeIMU
isFreeIMU();
// is RFM12B Radio
isRFM12BRadio();
// Inter Packet Delay
delay(interPacketDelay);
}
getFreeIMU.ino
// FreeIMU
// isFreeIMU
void isFreeIMU(){
// FreeIMU
// Yaw Pitch Roll
my3IMU.getYawPitchRoll(ypr);
// Yaw
Yaw = ypr[0];
// Pitch
Pitch = ypr[1];
// Roll
Roll = ypr[2];
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio(){
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Sleep right away to save power
radio.Sleep();
// Transmitting
Serial.println("Transmitting...\n\n");
}
// is RFM12 BRadio
void isRFM12BRadio(){
// sYaw, sPitch, sRoll ""
sYaw = "";
sPitch = "";
sRoll = "";
// sYaw, sPitch, sRoll concat
sYaw.concat(Yaw);
sPitch.concat(Pitch);
sRoll.concat(Roll);
// zzzzzz ""
zzzzzz = "";
// zzzzzz = "<IMU|1000|1000|1000|*";
// zzzzzz = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*"
zzzzzz = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*";
// sendSize Length
sendSize = zzzzzz.length();
// sendSize
payload[sendSize];
// sendSize, charAt
for(byte i = 0; i < sendSize+1; i++){
payload[i] = zzzzzz.charAt(i);
}
// payload
Serial.print(payload);
// Request ACK
requestACK = sendSize;
// Wakeup
radio.Wakeup();
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// Send
radio.Send(GATEWAYID, payload, sendSize, requestACK);
// Request ACK
if (requestACK)
{
Serial.print(" - waiting for ACK...");
if (waitForAck()){
Serial.print("Ok!");
}
else Serial.print("nothing...");
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
// Sleep
radio.Sleep();
// Serial
Serial.println();
}
// Wait a few milliseconds for proper ACK, return true if received
static bool waitForAck(){
// Now
long now = millis();
// ACK
while (millis() - now <= ACK_TIME){
if (radio.ACKReceived(GATEWAYID)){
return true;
}
}
return false;
}
setup.ino
// Setup
void setup(){
// Serial
Serial.begin(SERIAL_BAUD);
// LED
pinMode( iLED , OUTPUT);
// Set up I2C bus
Wire.begin();
// RFM12B Radio
isSetupRFM12BRadio();
// Pause
delay(5);
// Initialize IMU
my3IMU.init();
// Pause
delay(5);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #26 – Radio Frequency – Display – Mk05
——
#DonLucElectronics #DonLuc #RadioFrequency #Moteino #Send #Receive #Display #FreeIMU #Magnetometer #Accelerometer #Gyroscope #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
SparkFun Micro OLED Breakout
The SparkFun Qwiic Micro OLED Breakout is a Qwiic-enabled version of our popular Micro OLED display. The small monochrome, blue-on-black OLED screen presents incredibly clear images for your viewing pleasure. It’s the OLED display is crisp, and you can fit a deceivingly large amount of graphics on there. This breakout is perfect for adding graphics to your next project and displaying diagnostic information without resorting to a serial output, all with the ease of use of our own Qwiic Connect System.
This version of the Micro OLED Breakout is exactly the size of its non-Qwiic sibling, featuring a screen that is 64 pixels wide and 48 pixels tall and measuring 0.66″ across. But it has also been equipped with two Qwiic connectors, making it ideal for I2C operations. We’ve also added two mounting holes and a convenient Qwiic cable holder incorporated into a detachable tab on the board that can be easily removed thanks to a v-scored edge.
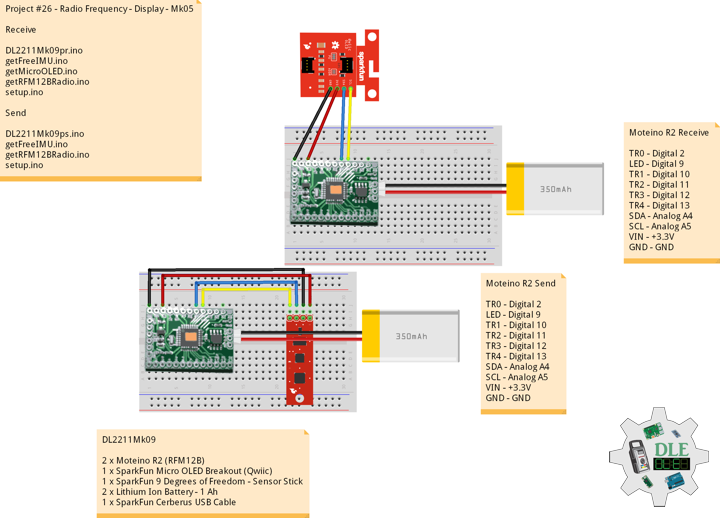
DL2211Mk09
2 x Moteino R2 (RFM12B)
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom – Sensor Stick
2 x Lithium Ion Battery – 1 Ah
1 x SparkFun Cerberus USB Cable
Moteino R2 (Receive)
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2211Mk09pr.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Display - Mk05
26-05
Receive
DL2211Mk09pr.ino
2 x Moteino R2 (RFM12B)
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
2 x Lithium Ion Battery - 1Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// SparkFun Micro OLED
#include <SFE_MicroOLED.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 1
// The network ID we are on
#define NETWORKID 99
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Process Message
// Message
String msg = "";
int firstClosingBracket = 0;
// Yaw Pitch Roll
String sYaw = "";
String sPitch = "";
String sRoll = "";
float Yaw = 0;
float Pitch = 0;
float Roll = 0;
// LED
int iLED = 9;
// SparkFun Micro OLED
#define PIN_RESET 9
#define DC_JUMPER 1
// I2C declaration
MicroOLED oled(PIN_RESET, DC_JUMPER);
// Software Version Information
String sver = "26-05";
void loop() {
// is RFM12B Radio
isRFM12BRadio();
// Micro OLED
isMicroOLED();
}
getFreeIMU.ino
// FreeIMU
// isFreeIMU
void isFreeIMU(){
// FreeIMU
// IMU Yaw Pitch Roll
// msg = "<IMU|1000|1000|1000|*";
// msg = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*"
firstClosingBracket = 0;
// "<IMU|"
firstClosingBracket = msg.indexOf('|');
msg.remove(0, 5);
// Yaw
firstClosingBracket = msg.indexOf('|');
sYaw = msg;
sYaw.remove(firstClosingBracket);
Yaw = sYaw.toFloat();
// Pitch
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
sPitch = msg;
sPitch.remove(firstClosingBracket);
Pitch = sPitch.toFloat();
// Roll
firstClosingBracket = firstClosingBracket + 1;
msg.remove(0, firstClosingBracket );
firstClosingBracket = msg.indexOf('|');
sRoll = msg;
sRoll.remove(firstClosingBracket);
Roll = sRoll.toFloat();
}
getMicroOLED.ino
// SparkFun Micro OLED
// Setup Micro OLED
void isSetupMicroOLED() {
// Initialize the OLED
oled.begin();
// Clear the display's internal memory
oled.clear(ALL);
// Display what's in the buffer (splashscreen)
oled.display();
// Delay 1000 ms
delay(1000);
// Clear the buffer.
oled.clear(PAGE);
}
// Micro OLED
void isMicroOLED() {
// Text Display FreeIMU
// Clear the display
oled.clear(PAGE);
// Set cursor to top-left
oled.setCursor(0, 0);
// Set font to type 0
oled.setFontType(0);
// FreeIMU
oled.print("FreeIMU");
oled.setCursor(0, 12);
// Yaw
oled.print("Y: ");
oled.print(Yaw);
oled.setCursor(0, 25);
// Pitch
oled.print("P: ");
oled.print(Pitch);
oled.setCursor(0, 39);
// Roll
oled.print("R: ");
oled.print(Roll);
oled.display();
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio()
{
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Transmitting
Serial.println("Listening...");
}
// is RFM12 BRadio
void isRFM12BRadio()
{
// Receive
if (radio.ReceiveComplete())
{
// CRC Pass
if (radio.CRCPass())
{
// Serial
Serial.print('[');
Serial.print(radio.GetSender());
Serial.print("] ");
// Message
msg = "";
// Can also use radio.GetDataLen() if you don't like pointers
for (byte i = 0; i < *radio.DataLen; i++)
{
Serial.print((char)radio.Data[i]);
msg = msg + (char)radio.Data[i];
}
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// FreeIMU
// Yaw Pitch Roll
isFreeIMU();
// ACK Requested
if (radio.ACKRequested())
{
// Send ACK
radio.SendACK();
Serial.print(" - ACK Sent");
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
}
else
{
// BAD-CRC
Serial.print("BAD-CRC");
}
// Serial
Serial.println();
}
}
setup.ino
// Setup
void setup()
{
// Serial
Serial.begin(SERIAL_BAUD);
// Give display time to power on
delay(100);
// Set up I2C bus
Wire.begin();
// Setup Micro OLED
isSetupMicroOLED();
// LED
pinMode( iLED , OUTPUT);
// RFM12B Radio
isSetupRFM12BRadio();
}
——
Moteino R2 (Send)
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2211Mk09ps.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Display - Mk05
26-05
Send
DL2211Mk09ps.ino
2 x Moteino R2 (RFM12B)
1 x SparkFun Micro OLED Breakout (Qwiic)
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
2 x Lithium Ion Battery - 1Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Sleep
#include <avr/sleep.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// Includes and variables for IMU integration
// Accelerometer
#include <ADXL345.h>
// Magnetometer
#include <HMC58X3.h>
// MEMS Gyroscope
#include <ITG3200.h>
// Debug
#include "DebugUtils.h"
// FreeIMU
#include <CommunicationUtils.h>
#include <FreeIMU.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 2
// The network ID we are on
#define NETWORKID 99
// The node ID we're sending to
#define GATEWAYID 1
// # of ms to wait for an ack
#define ACK_TIME 50
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Wait this many ms between sending packets
int interPacketDelay = 1000;
// Input
char input = 0;
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Send Size
byte sendSize = 0;
// Payload
char payload[100];
// Request ACK
bool requestACK = false;
// LED
int iLED = 9;
// Set the FreeIMU object
FreeIMU my3IMU = FreeIMU();
// Yaw Pitch Roll
String zzzzzz = "";
String sYaw = "";
String sPitch = "";
String sRoll = "";
float ypr[3];
float Yaw = 0;
float Pitch = 0;
float Roll = 0;
// Software Version Information
String sver = "26-05";
void loop()
{
// isFreeIMU
isFreeIMU();
// is RFM12B Radio
isRFM12BRadio();
// Inter Packet Delay
delay(interPacketDelay);
}
getFreeIMU.ino
// FreeIMU
// isFreeIMU
void isFreeIMU(){
// FreeIMU
// Yaw Pitch Roll
my3IMU.getYawPitchRoll(ypr);
// Yaw
Yaw = ypr[0];
// Pitch
Pitch = ypr[1];
// Roll
Roll = ypr[2];
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio(){
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Sleep right away to save power
radio.Sleep();
// Transmitting
Serial.println("Transmitting...\n\n");
}
// is RFM12 BRadio
void isRFM12BRadio(){
// sYaw, sPitch, sRoll ""
sYaw = "";
sPitch = "";
sRoll = "";
// sYaw, sPitch, sRoll concat
sYaw.concat(Yaw);
sPitch.concat(Pitch);
sRoll.concat(Roll);
// zzzzzz ""
zzzzzz = "";
// zzzzzz = "<IMU|1000|1000|1000|*";
// zzzzzz = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*"
zzzzzz = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*";
// sendSize Length
sendSize = zzzzzz.length();
// sendSize
payload[sendSize];
// sendSize, charAt
for(byte i = 0; i < sendSize+1; i++){
payload[i] = zzzzzz.charAt(i);
}
// payload
Serial.print(payload);
// Request ACK
requestACK = sendSize;
// Wakeup
radio.Wakeup();
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// Send
radio.Send(GATEWAYID, payload, sendSize, requestACK);
// Request ACK
if (requestACK)
{
Serial.print(" - waiting for ACK...");
if (waitForAck()){
Serial.print("Ok!");
}
else Serial.print("nothing...");
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
// Sleep
radio.Sleep();
// Serial
Serial.println();
}
// Wait a few milliseconds for proper ACK, return true if received
static bool waitForAck(){
// Now
long now = millis();
// ACK
while (millis() - now <= ACK_TIME){
if (radio.ACKReceived(GATEWAYID)){
return true;
}
}
return false;
}
setup.ino
// Setup
void setup(){
// Serial
Serial.begin(SERIAL_BAUD);
// LED
pinMode( iLED , OUTPUT);
// Set up I2C bus
Wire.begin();
// RFM12B Radio
isSetupRFM12BRadio();
// Pause
delay(5);
// Initialize IMU
my3IMU.init();
// Pause
delay(5);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #26 – Radio Frequency – FreeIMU – Mk04
——
#DonLucElectronics #DonLuc #RadioFrequency #Moteino #Send #Receive #FreeIMU #Magnetometer #Accelerometer #Gyroscope #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
FreeIMU
Orientation and Motion Sensing are widely implemented on various consumer products, such as mobile phones, tablets and cameras as they enable immediate interaction with virtual information. The prototyping phase of any orientation and motion sensing capable device is however a quite difficult process as it may involve complex hardware designing, math algorithms and programming. FreeIMU, an Open Hardware Framework for prototyping orientation and motion sensing capable devices. The framework consists in a small circuit board containing various sensors and a software library, built on top of the Arduino platform. Both the hardware and library are released under open licences and supported by an active community allowing to be implemented into research and commercial projects.
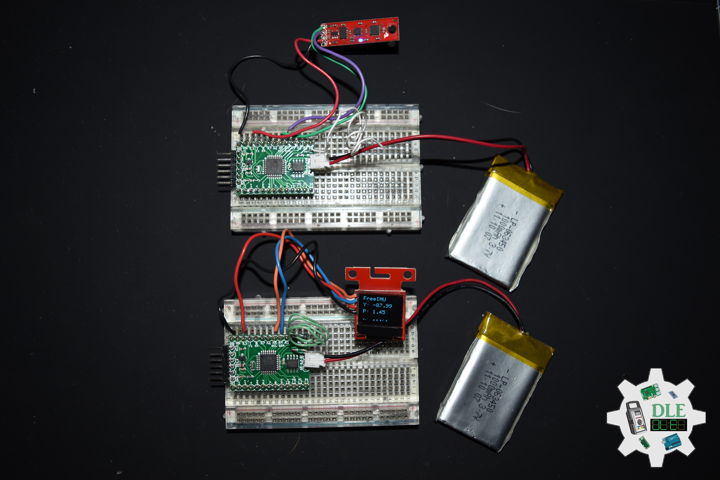
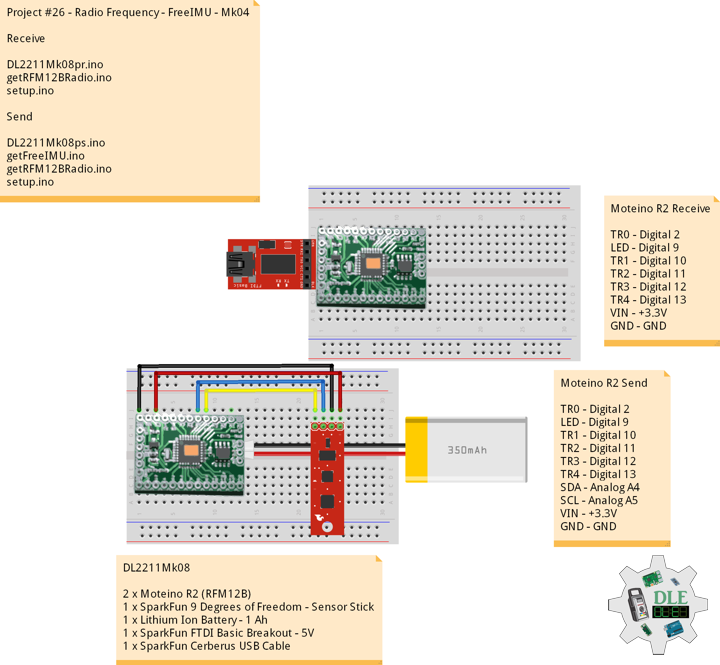
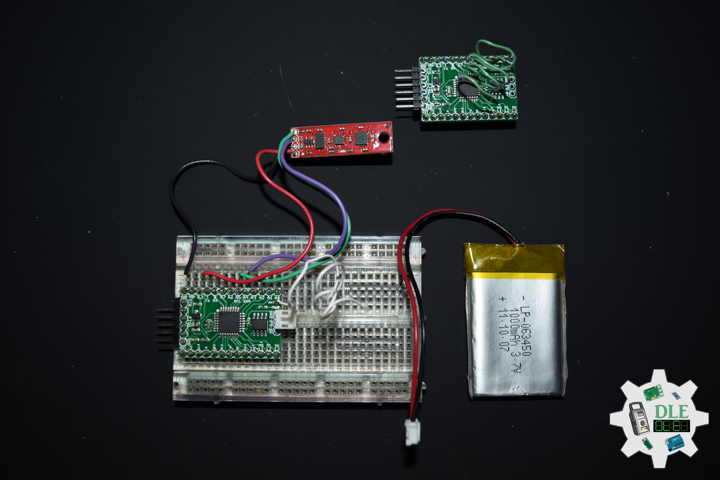
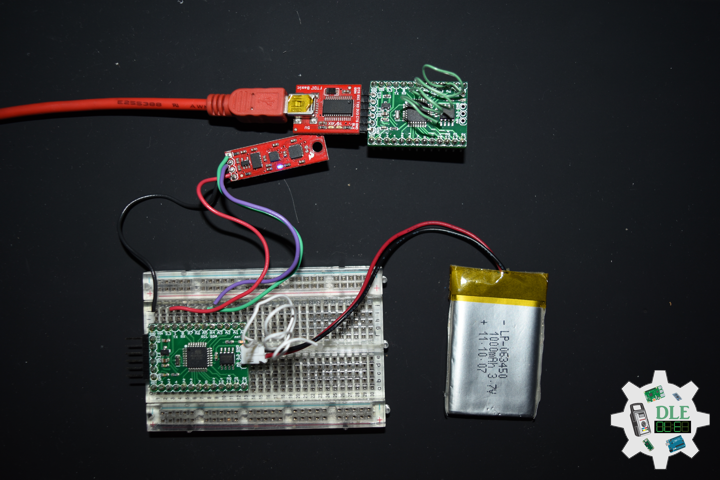
DL2211Mk08
2 x Moteino R2 (RFM12B)
1 x SparkFun 9 Degrees of Freedom – Sensor Stick
1 x Lithium Ion Battery – 1 Ah
1 x SparkFun FTDI Basic Breakout – 5V
1 x SparkFun Cerberus USB Cable
Moteino R2 (Receive)
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
VIN – +3.3V
GND – GND
——
DL2211Mk08pr.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - FreeIMU - Mk04
26-04
Receive
DL2211Mk08pr.ino
2 x Moteino R2 (RFM12B)
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
1 x Lithium Ion Battery - 1Ah
1 x SparkFun FTDI Basic Breakout - 5V
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 1
// The network ID we are on
#define NETWORKID 99
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// LED
int iLED = 9;
// Software Version Information
String sver = "26-04";
void loop() {
// is RFM12B Radio
isRFM12BRadio();
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio()
{
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Transmitting
Serial.println("Listening...");
}
// is RFM12 BRadio
void isRFM12BRadio()
{
// Receive
if (radio.ReceiveComplete())
{
// CRC Pass
if (radio.CRCPass())
{
// Serial
Serial.print('[');
Serial.print(radio.GetSender());
Serial.print("] ");
// Can also use radio.GetDataLen() if you don't like pointers
for (byte i = 0; i < *radio.DataLen; i++)
{
Serial.print((char)radio.Data[i]);
}
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// ACK Requested
if (radio.ACKRequested())
{
// Send ACK
radio.SendACK();
Serial.print(" - ACK Sent");
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
}
else
{
// BAD-CRC
Serial.print("BAD-CRC");
}
// Serial
Serial.println();
}
}
setup.ino
// Setup
void setup()
{
// Serial
Serial.begin(SERIAL_BAUD);
// LED
pinMode( iLED , OUTPUT);
// RFM12B Radio
isSetupRFM12BRadio();
}
Moteino R2 (Send)
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2211Mk08ps.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - FreeIMU - Mk04
26-04
Send
DL2211Mk08ps.ino
2 x Moteino R2 (RFM12B)
1 x SparkFun 9 Degrees of Freedom - Sensor Stick
1 x Lithium Ion Battery - 1Ah
1 x SparkFun FTDI Basic Breakout - 5V
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Sleep
#include <avr/sleep.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// Includes and variables for IMU integration
// Accelerometer
#include <ADXL345.h>
// Magnetometer
#include <HMC58X3.h>
// MEMS Gyroscope
#include <ITG3200.h>
// Debug
#include "DebugUtils.h"
// FreeIMU
#include <CommunicationUtils.h>
#include <FreeIMU.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 2
// The network ID we are on
#define NETWORKID 99
// The node ID we're sending to
#define GATEWAYID 1
// # of ms to wait for an ack
#define ACK_TIME 50
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Wait this many ms between sending packets
int interPacketDelay = 1000;
// Input
char input = 0;
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Send Size
byte sendSize = 0;
// Payload
char payload[100];
// Request ACK
bool requestACK = false;
// LED
int iLED = 9;
// Set the FreeIMU object
FreeIMU my3IMU = FreeIMU();
// Yaw Pitch Roll
String zzzzzz = "";
String sYaw = "";
String sPitch = "";
String sRoll = "";
float ypr[3];
float Yaw = 0;
float Pitch = 0;
float Roll = 0;
// Software Version Information
String sver = "26-04";
void loop()
{
// isFreeIMU
isFreeIMU();
// is RFM12B Radio
isRFM12BRadio();
// Inter Packet Delay
delay(interPacketDelay);
}
getFreeIMU.ino
// FreeIMU
// isFreeIMU
void isFreeIMU(){
// FreeIMU
// Yaw Pitch Roll
my3IMU.getYawPitchRoll(ypr);
// Yaw
Yaw = ypr[0];
// Pitch
Pitch = ypr[1];
// Roll
Roll = ypr[2];
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio(){
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Sleep right away to save power
radio.Sleep();
// Transmitting
Serial.println("Transmitting...\n\n");
}
// is RFM12 BRadio
void isRFM12BRadio(){
// sYaw, sPitch, sRoll ""
sYaw = "";
sPitch = "";
sRoll = "";
// sYaw, sPitch, sRoll concat
sYaw.concat(Yaw);
sPitch.concat(Pitch);
sRoll.concat(Roll);
// zzzzzz ""
zzzzzz = "";
// zzzzzz = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*"
zzzzzz = "<IMU|" + sYaw + "|" + sPitch + "|" + sRoll + "|*";
// sendSize Length
sendSize = zzzzzz.length();
// sendSize
payload[sendSize];
// sendSize, charAt
for(byte i = 0; i < sendSize+1; i++){
payload[i] = zzzzzz.charAt(i);
}
// payload
Serial.print(payload);
// Request ACK
requestACK = sendSize;
// Wakeup
radio.Wakeup();
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// Send
radio.Send(GATEWAYID, payload, sendSize, requestACK);
// Request ACK
if (requestACK)
{
Serial.print(" - waiting for ACK...");
if (waitForAck()){
Serial.print("Ok!");
}
else Serial.print("nothing...");
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
// Sleep
radio.Sleep();
// Serial
Serial.println();
}
// Wait a few milliseconds for proper ACK, return true if received
static bool waitForAck(){
// Now
long now = millis();
// ACK
while (millis() - now <= ACK_TIME){
if (radio.ACKReceived(GATEWAYID)){
return true;
}
}
return false;
}
setup.ino
// Setup
void setup(){
// Serial
Serial.begin(SERIAL_BAUD);
// LED
pinMode( iLED , OUTPUT);
// Set up I2C bus
Wire.begin();
// RFM12B Radio
isSetupRFM12BRadio();
// Pause
delay(5);
// Initialize IMU
my3IMU.init();
// Pause
delay(5);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
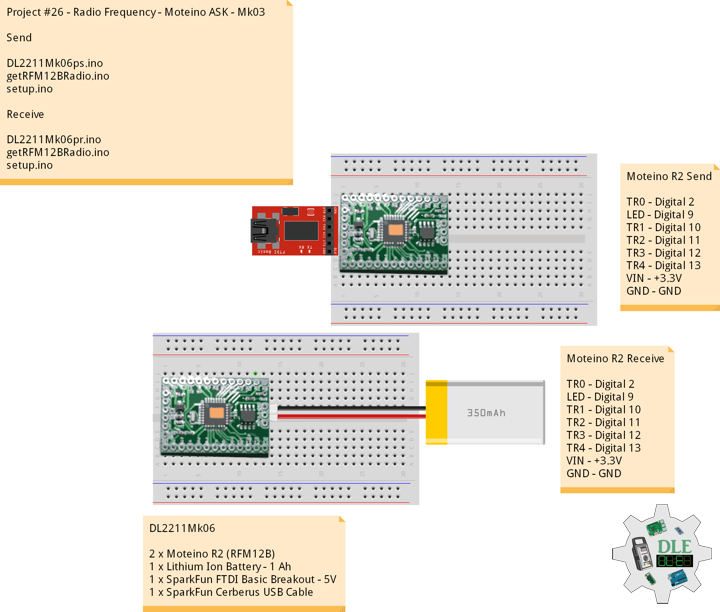
Project #26 – Radio Frequency – Moteino ASK – Mk03
——
#DonLucElectronics #DonLuc #RadioFrequency #Moteino #Send #Receive #ASK #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Send and Receive
These RF Transmitter Modules are very small in dimension and have a wide operating voltage range. The low cost RF Transmitter can be used to transmit signal up to 100 meters. It is good for short distance, battery power device development. These wireless transmitters work with 433 MHz receivers. They are breadboard friendly and also work great with microcontrollers to create a very simple wireless data link.
Amplitude-Shift Keying
Amplitude-Shift Keying, or ASK, is a form of amplitude modulation that represents digital data as variations in the amplitude of a carrier wave. In an ASK system, a symbol, representing one or more bits, is sent by transmitting a fixed-amplitude carrier wave at a fixed frequency for a specific time duration. For example, if each symbol represents a single bit, then the carrier signal could be transmitted at nominal amplitude when the input value is 1, but transmitted at reduced amplitude or not at all when the input value is 0.
These modules use a technique known as Amplitude Shift Keying to transmit digital data over the radio. In amplitude shift keying, the amplitude of the carrier wave, 433 MHz signal in our case, is modified in response to an incoming data signal.
DL2211Mk06
2 x Moteino R2 (RFM12B)
1 x Lithium Ion Battery – 1 Ah
1 x SparkFun FTDI Basic Breakout – 5V
1 x SparkFun Cerberus USB Cable
Moteino R2 (Send)
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
VIN – +3.3V
GND – GND
DL2211Mk06ps.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Moteino ASK - Mk03
26-03
Send
DL2211Mk06ps.ino
2 x Moteino R2 (RFM12B)
1 x Lithium Ion Battery - 1Ah
1 x SparkFun FTDI Basic Breakout - 5V
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Sleep
#include <avr/sleep.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 2
// The network ID we are on
#define NETWORKID 99
// The node ID we're sending to
#define GATEWAYID 1
// # of ms to wait for an ack
#define ACK_TIME 50
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Wait this many ms between sending packets
int interPacketDelay = 1000;
// Input
char input = 0;
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Send Size
byte sendSize = 0;
// Payload
char payload[] = "abcdefghijklmnopqrstuvwxyzABCDEFGHIJKLMNOPQRSTUVWXYZ1234567890~!@#$%^&*(){}[]`|<>?+=:;,.";
// Request ACK
bool requestACK = false;
// LED
int iLED = 9;
// Software Version Information
String sver = "26-03";
void loop()
{
// is RFM12B Radio
isRFM12BRadio();
// Inter Packet Delay
delay(interPacketDelay);
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio(){
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Sleep right away to save power
radio.Sleep();
// Transmitting
Serial.println("Transmitting...\n\n");
}
// is RFM12 BRadio
void isRFM12BRadio(){
// Serial input of [0-9] will change the transmit delay between 100-1000ms
if (Serial.available() > 0)
{
// Input
input = Serial.read();
// [1..9] = {100..900}ms; [0]=1000ms
if (input >= 48 && input <= 57)
{
// Inter Packet Delay
interPacketDelay = 100 * (input-48);
if (interPacketDelay == 0) interPacketDelay = 1000;
Serial.print("\nChanging delay to ");
Serial.print(interPacketDelay);
Serial.println("ms\n");
}
}
// Serial
Serial.print("Sending[");
Serial.print(sendSize+1);
Serial.print("]:");
for(byte i = 0; i < sendSize+1; i++)
Serial.print((char)payload[i]);
// Request ACK every 3rd xmission
requestACK = !(sendSize % 3);
// Wakeup
radio.Wakeup();
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// Send
radio.Send(GATEWAYID, payload, sendSize+1, requestACK);
// Request ACK
if (requestACK)
{
Serial.print(" - waiting for ACK...");
if (waitForAck()) Serial.print("ok!");
else Serial.print("nothing...");
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
// Sleep
radio.Sleep();
// Send Size
sendSize = (sendSize + 1) % 88;
// Serial
Serial.println();
}
// Wait a few milliseconds for proper ACK, return true if received
static bool waitForAck(){
// Now
long now = millis();
// ACK
while (millis() - now <= ACK_TIME){
if (radio.ACKReceived(GATEWAYID)){
return true;
}
}
return false;
}
setup.ino
// Setup
void setup(){
// Serial
Serial.begin(SERIAL_BAUD);
// LED
pinMode( iLED , OUTPUT);
// RFM12B Radio
isSetupRFM12BRadio();
}
——
Moteino R2 (Receive)
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
VIN – +3.3V
GND – GND
DL2211Mk06pr.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Moteino ASK - Mk03
26-03
Receive
DL2211Mk06pr.ino
2 x Moteino R2 (RFM12B)
1 x Lithium Ion Battery - 1Ah
1 x SparkFun FTDI Basic Breakout - 5V
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 1
// The network ID we are on
#define NETWORKID 99
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// LED
int iLED = 9;
// Software Version Information
String sver = "26-03";
void loop() {
// is RFM12B Radio
isRFM12BRadio();
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio()
{
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Transmitting
Serial.println("Listening...");
}
// is RFM12 BRadio
void isRFM12BRadio()
{
// Receive
if (radio.ReceiveComplete())
{
// CRC Pass
if (radio.CRCPass())
{
// Serial
Serial.print('[');
Serial.print(radio.GetSender());
Serial.print("] ");
// Can also use radio.GetDataLen() if you don't like pointers
for (byte i = 0; i < *radio.DataLen; i++)
{
Serial.print((char)radio.Data[i]);
}
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// ACK Requested
if (radio.ACKRequested())
{
// Send ACK
radio.SendACK();
Serial.print(" - ACK Sent");
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
}
else
{
// BAD-CRC
Serial.print("BAD-CRC");
}
// Serial
Serial.println();
}
}
setup.ino
// Setup
void setup()
{
// Serial
Serial.begin(SERIAL_BAUD);
// LED
pinMode( iLED , OUTPUT);
// RFM12B Radio
isSetupRFM12BRadio();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
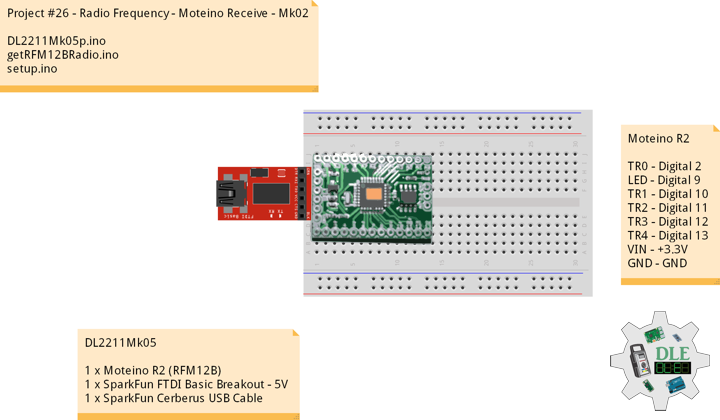
Project #26 – Radio Frequency – Moteino Receive – Mk02
——
#DonLucElectronics #DonLuc #RadioFrequency #Moteino #Receive #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Radio Receiver
In radio communications, a radio receiver, also known as a receiver, a wireless, or simply a radio, is an electronic device that receives radio waves and converts the information carried by them to a usable form. It is used with an antenna. The antenna intercepts radio waves and converts them to tiny alternating currents which are applied to the receiver, and the receiver extracts the desired information. The receiver uses electronic filters to separate the desired radio frequency signal from all the other signals picked up by the antenna, an electronic amplifier to increase the power of the signal for further processing, and finally recovers the desired information through demodulation.
Full Duplex
A simple illustration of a full-duplex communication system. Full-duplex is not common in handheld radios as shown here due to the cost and complexity of common duplexing methods, but is used in telephones, cellphones and cordless phones. A full-duplex (FDX) system allows communication in both directions, and, unlike half-duplex, allows this to happen simultaneously.
Land-line telephone networks are full-duplex since they allow both callers to speak and be heard at the same time. Full-duplex operation is achieved on a two-wire circuit through the use of a hybrid coil in a telephone hybrid. Modern cell phones are also full-duplex.
There is a technical distinction between full-duplex communication, which uses a single physical communication channel for both directions simultaneously, and dual-simplex communication which uses two distinct channels, one for each direction. From the user perspective, the technical difference doesn’t matter and both variants are commonly referred to as full duplex.
DL2211Mk05
1 x Moteino R2 (RFM12B)
1 x SparkFun FTDI Basic Breakout – 5V
1 x SparkFun Cerberus USB Cable
Moteino R2
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
VIN – +3.3V
GND – GND
——
DL2211Mk05p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Moteino Receive - Mk02
26-02
DL2211Mk05p.ino
1 x Moteino R2 (RFM12B)
1 x SparkFun FTDI Basic Breakout - 5V
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 1
// The network ID we are on
#define NETWORKID 99
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// LED
int iLED = 9;
// Software Version Information
String sver = "26-02";
void loop() {
// is RFM12B Radio
isRFM12BRadio();
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio()
{
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Transmitting
Serial.println("Listening...");
}
// is RFM12 BRadio
void isRFM12BRadio()
{
// Receive
if (radio.ReceiveComplete())
{
// CRC Pass
if (radio.CRCPass())
{
// Serial
Serial.print('[');
Serial.print(radio.GetSender());
Serial.print("] ");
// Can also use radio.GetDataLen() if you don't like pointers
for (byte i = 0; i < *radio.DataLen; i++)
{
Serial.print((char)radio.Data[i]);
}
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// ACK Requested
if (radio.ACKRequested())
{
// Send ACK
radio.SendACK();
Serial.print(" - ACK Sent");
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
}
else
{
// BAD-CRC
Serial.print("BAD-CRC");
}
// Serial
Serial.println();
}
}
setup.ino
// Setup
void setup()
{
// Serial
Serial.begin(SERIAL_BAUD);
// LED
pinMode( iLED , OUTPUT);
// RFM12B Radio
isSetupRFM12BRadio();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #26 – Radio Frequency – Moteino Send – Mk01
——
#DonLucElectronics #DonLuc #RadioFrequency #Moteino #Send #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Radio Frequency
Radio Frequency (RF) is the oscillation rate of an alternating electric current or voltage or of a magnetic, electric or electromagnetic field or mechanical system in the frequency range from around 20 kHz to around 300 GHz. This is roughly between the upper limit of audio frequencies and the lower limit of infrared frequencies, these are the frequencies at which energy from an oscillating current can radiate off a conductor into space as radio waves. Different sources specify different upper and lower bounds for the frequency range. Energy from RF currents in conductors can radiate into space as radio waves. This is the basis of radio technology.
Duplex Telecommunications
A duplex communication system is a point-to-point system composed of two or more connected parties or devices that can communicate with one another in both directions. Duplex systems are employed in many communications networks, either to allow for simultaneous communication in both directions between two connected parties or to provide a reverse path for the monitoring and remote adjustment of equipment in the field. There are two types of duplex communication systems: full-duplex (FDX) and half-duplex (HDX).
ISM Radio Band
The ISM radio bands are portions of the radio spectrum reserved internationally for industrial, scientific and medical (ISM) purposes, excluding applications in telecommunications. Examples of applications for the use of radio frequency (RF) energy in these bands include radio-frequency process heating, microwave ovens, and medical diathermy machines. The powerful emissions of these devices can create electromagnetic interference and disrupt radio communication using the same frequency, so these devices are limited to certain bands of frequencies. In general, communications equipment operating in ISM bands must tolerate any interference generated by ISM applications, and users have no regulatory protection from ISM device operation in these bands.
RFM12B Universal ISM Band FSK Transceiver
Hoperf is RFM12B is a single chip, low power, multi-channel FSK transceiver designed for use in applications requiring FCC or ETSI conformance for unlicensed use in the 433, 868 and 915 MHz bands. The RFM12B transceiver is a part of Hoperf EZRadio product line, which produces a flexible, low cost, and highly integrated solution that does not require production alignments. All required RF functions are integrated. Only an external crystal and bypass filtering are needed for operation.
Moteino
Moteino began as a low power wireless Arduino compatible development platform based on the popular ATmega328p chip used in the Arduino UNO. Moteinos are compatible and can communicate with any other Arduino or development platform that uses the popular HopeRF RFM69 or LoRa transceivers, or even the older RFM12B. Moteino also comes with an optional SPI flash memory chip for wireless programming, or data logging. Moteino was designed to be a compact, highly customizable and affordable development platform, suitable for IoT, home automation and long range wireless projects.
Moteino R2 (RFM12B)
- Frequency Band: 433 MHz
- Flash Memory: With 4Mbit Flash Chip
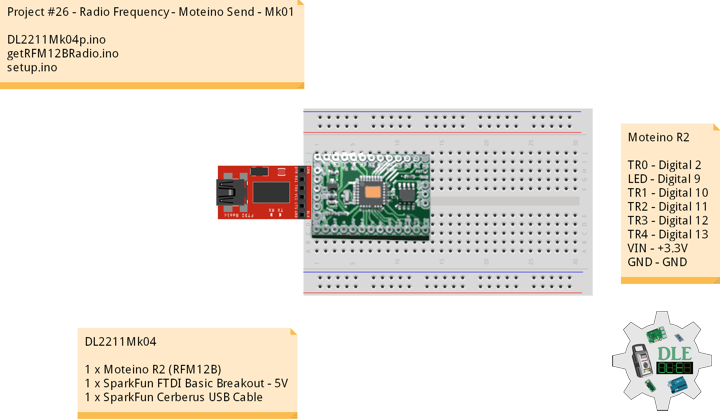
DL2211Mk04
1 x Moteino R2 (RFM12B)
1 x SparkFun FTDI Basic Breakout – 5V
1 x SparkFun Cerberus USB Cable
——
Moteino R2
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
VIN – +3.3V
GND – GND
——
DL2211Mk04p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Moteino Send - Mk01
26-01
DL2211Mk04p.ino
1 x Moteino R2 (RFM12B)
1 x SparkFun FTDI Basic Breakout - 5V
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Sleep
#include <avr/sleep.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 2
// The network ID we are on
#define NETWORKID 99
// The node ID we're sending to
#define GATEWAYID 1
// # of ms to wait for an ack
#define ACK_TIME 50
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Wait this many ms between sending packets
int interPacketDelay = 1000;
// Input
char input = 0;
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Send Size
byte sendSize = 0;
// Payload
char payload[] = "abcdefghijklmnopqrstuvwxyzABCDEFGHIJKLMNOPQRSTUVWXYZ1234567890~!@#$%^&*(){}[]`|<>?+=:;,.";
// Request ACK
bool requestACK = false;
// LED
int iLED = 9;
// Software Version Information
String sver = "26-01";
void loop()
{
// is RFM12B Radio
isRFM12BRadio();
// Inter Packet Delay
delay(interPacketDelay);
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio(){
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Sleep right away to save power
radio.Sleep();
// Transmitting
Serial.println("Transmitting...\n\n");
}
// is RFM12 BRadio
void isRFM12BRadio(){
// Serial input of [0-9] will change the transmit delay between 100-1000ms
if (Serial.available() > 0)
{
// Input
input = Serial.read();
// [1..9] = {100..900}ms; [0]=1000ms
if (input >= 48 && input <= 57)
{
// Inter Packet Delay
interPacketDelay = 100 * (input-48);
if (interPacketDelay == 0) interPacketDelay = 1000;
Serial.print("\nChanging delay to ");
Serial.print(interPacketDelay);
Serial.println("ms\n");
}
}
// Serial
Serial.print("Sending[");
Serial.print(sendSize+1);
Serial.print("]:");
for(byte i = 0; i < sendSize+1; i++)
Serial.print((char)payload[i]);
// Request ACK every 3rd xmission
requestACK = !(sendSize % 3);
// Wakeup
radio.Wakeup();
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// Send
radio.Send(GATEWAYID, payload, sendSize+1, requestACK);
// Request ACK
if (requestACK)
{
Serial.print(" - waiting for ACK...");
if (waitForAck()) Serial.print("ok!");
else Serial.print("nothing...");
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
// Sleep
radio.Sleep();
// Send Size
sendSize = (sendSize + 1) % 88;
// Serial
Serial.println();
}
// Wait a few milliseconds for proper ACK, return true if received
static bool waitForAck(){
// Now
long now = millis();
// ACK
while (millis() - now <= ACK_TIME){
if (radio.ACKReceived(GATEWAYID)){
return true;
}
}
return false;
}
setup.ino
// Setup
void setup(){
// Serial
Serial.begin(SERIAL_BAUD);
// LED
pinMode( iLED , OUTPUT);
// RFM12B Radio
isSetupRFM12BRadio();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/channel/UC5eRjrGn1CqkkGfZy0jxEdA
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc