Projects
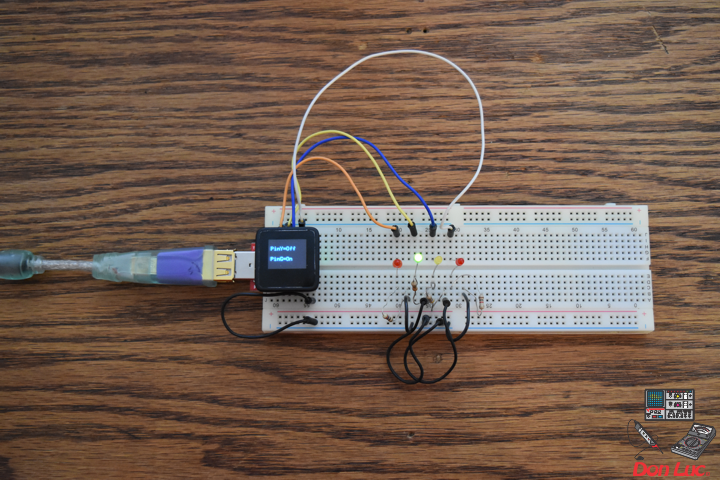
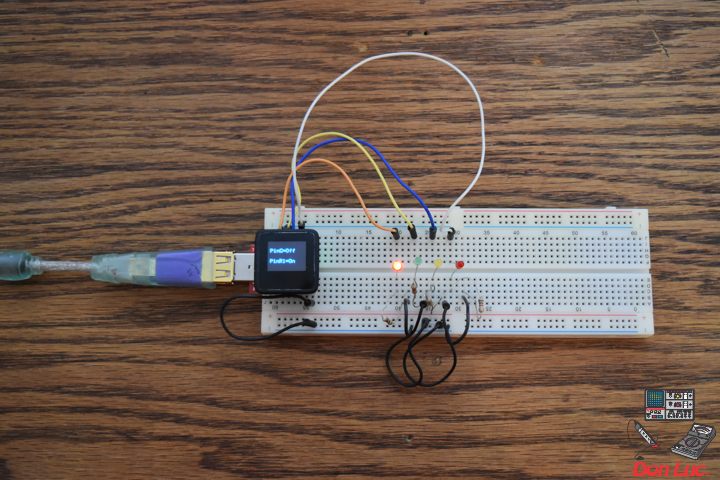
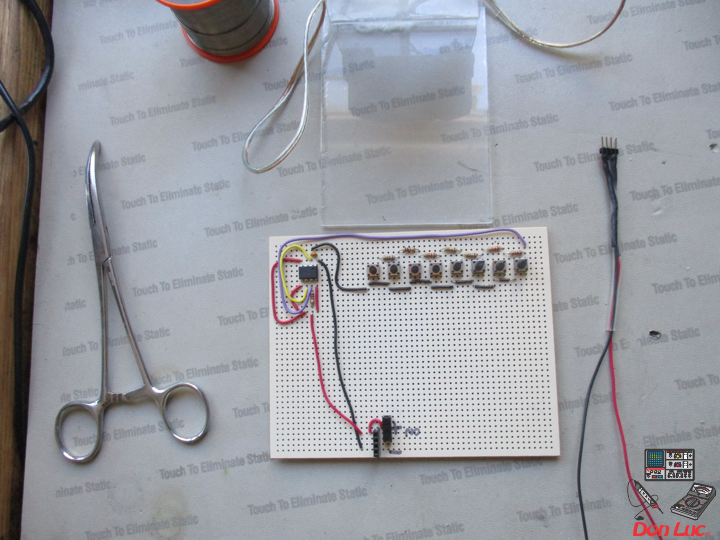
Project #6: MicroView – Mk05
MicroView
Project #6 – Mk05
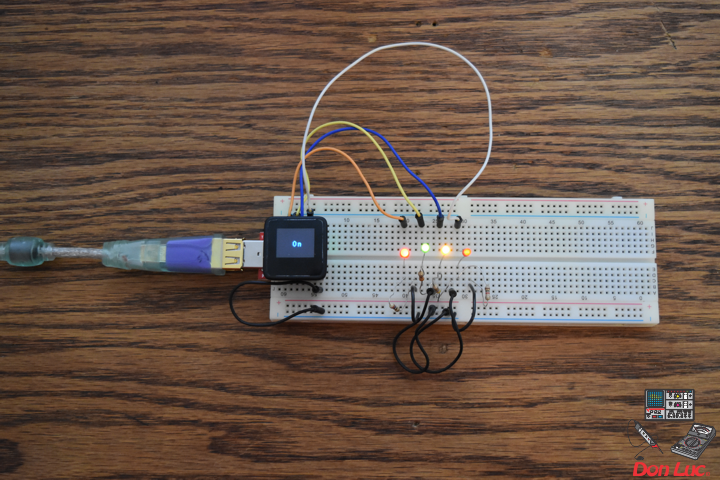
4 x LED
1 x MicroView
1 x MicroView – USB Programmer
1 X Resistor 620 Ohm
1 X Resistor 5 Ohm
1 X Resistor 250 Ohm
1 X Resistor 200 Ohm
1 X 3mm Low Current Red LED – WP710A10LSRD
1 x 3mm Low Current Yellow LED – WP710A10LYD
1 x 3mm Low Current Green LED – WP710A10LGD
1 x 3mm Low Current Red LED – WP710A10LID
9 x Jumper Wires 3″ M/M
1 x Half-Size Breadboard
08 pin – GND
14 pin – 6
13 pin – 5
12 pin – 3
11 pin – 2
DonLuc1804Mk09a.ino
// ***** Don Luc *****
// Software Version Information
// 5.01
// DonLuc1804Mk06 5.01
// MicroView
// 4 x LED
// include the library code:
#include <MicroView.h>
// 4 x LED
int ledPinR = 2; // select the pin for the LED Red - WP710A10LSRD
int ledPinY = 3; // select the pin for the LED Yellow - WP710A10LYD
int ledPinG = 5; // select the pin for the LED Green - WP710A10LGD
int ledPinR1 = 6; // select the pin for the LED Red - WP710A10LID
void loop() {
// 4 x LED
isLED();
uView.clear(PAGE);
}
getLED.ino
void isLED(){
digitalWrite(ledPinR, HIGH); // turn the ledPinR on
digitalWrite(ledPinY, HIGH); // turn the ledPinY on
digitalWrite(ledPinG, HIGH); // turn the ledPinG on
digitalWrite(ledPinR1, HIGH); // turn the ledPinR1 on
uView.setFontType(1); // set font type 1: Numbers and letters. 7 characters per line (3 lines)
uView.setCursor(0,20);
uView.print( " On" );
uView.display();
delay(5000);
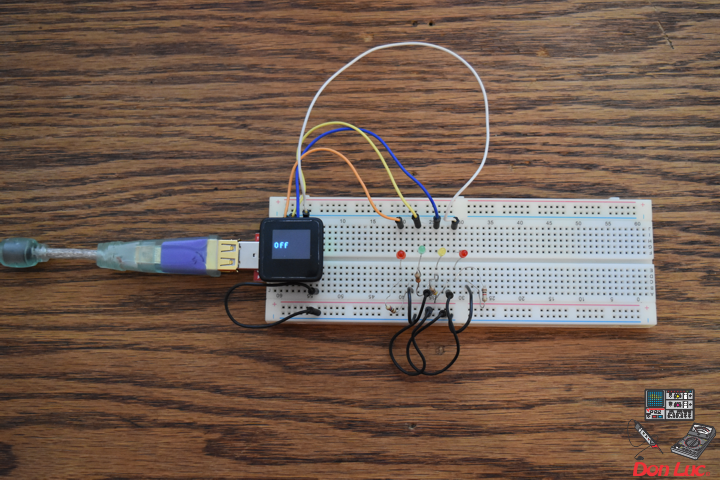
uView.clear(PAGE);
digitalWrite(ledPinR, LOW); // turn the ledPinR off
digitalWrite(ledPinY, LOW); // turn the ledPinY off
digitalWrite(ledPinG, LOW); // turn the ledPinG off
digitalWrite(ledPinR1, LOW); // turn the ledPinR1 off
uView.setCursor(0,20);
uView.print( " Off" );
uView.display();
delay(5000);
uView.clear(PAGE);
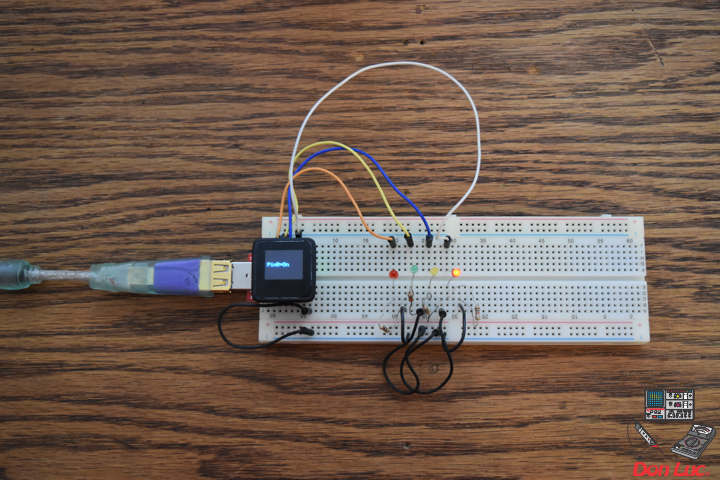
digitalWrite(ledPinR, HIGH); // turn the ledPinR on
uView.setFontType(0); // set font type 0: Numbers and letters. 10 characters per line (6 lines)
uView.setCursor(0,20);
uView.print( "PinR=On" );
uView.display();
delay(3000);
uView.clear(PAGE);
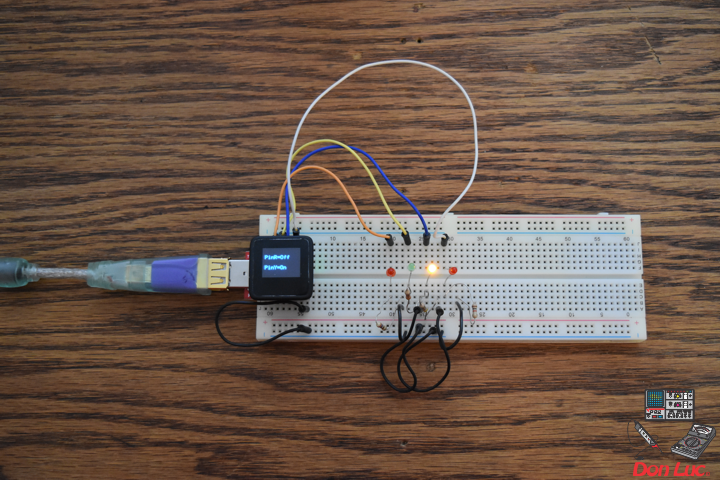
digitalWrite(ledPinR, LOW); // turn the ledPinR off
digitalWrite(ledPinY, HIGH); // turn the ledPinY on
uView.setCursor(0,10);
uView.print( "PinR=Off" );
uView.display();
uView.setCursor(0,30);
uView.print( "PinY=On" );
uView.display();
delay(3000);
uView.clear(PAGE);
digitalWrite(ledPinY, LOW); // turn the ledPinY off
digitalWrite(ledPinG, HIGH); // turn the ledPinG on
uView.setCursor(0,10);
uView.print( "PinY=Off" );
uView.display();
uView.setCursor(0,30);
uView.print( "PinG=On" );
uView.display();
delay(3000);
uView.clear(PAGE);
digitalWrite(ledPinG, LOW); // turn the ledPinG off
digitalWrite(ledPinR1, HIGH); // turn the ledPinR1 on
uView.setCursor(0,10);
uView.print( "PinG=Off" );
uView.display();
uView.setCursor(0,30);
uView.print( "PinR1=On" );
uView.display();
delay(3000);
uView.clear(PAGE);
digitalWrite(ledPinR, LOW); // turn the ledPinR off
digitalWrite(ledPinY, LOW); // turn the ledPinY off
digitalWrite(ledPinG, LOW); // turn the ledPinG off
digitalWrite(ledPinR1, LOW); // turn the ledPinR1 off
uView.setFontType(1); // set font type 1: Numbers and letters. 7 characters per line (3 lines)
uView.setCursor(0,20);
uView.print( "Off" );
uView.display();
delay(3000);
uView.clear(PAGE);
}
setup.ino
void setup() {
uView.begin(); // begin of MicroView
uView.clear(ALL); // erase hardware memory inside the OLED controller
uView.display(); // display the content in the buffer memory, by default it is the MicroView logo
delay(1000);
uView.clear(PAGE); // erase the memory buffer, when next uView.display() is called, the OLED will be cleared.
uView.setFontType(1); // set font type 1: Numbers and letters. 7 characters per line (3 lines)
uView.setCursor(0,20);
uView.print("Don Luc");
uView.display();
delay(5000);
uView.clear(PAGE); // erase the memory buffer, when next uView.display() is called, the OLED will be cleared.
uView.setFontType(1); // set font type 1: Numbers and letters. 7 characters per line (3 lines)
uView.setCursor(0,20);
uView.print("4 x LED");
uView.display();
delay(5000);
uView.clear(PAGE);
// ledPinR, ledPinY, ledPinG, ledPinR1
pinMode(ledPinR, OUTPUT);
pinMode(ledPinY, OUTPUT);
pinMode(ledPinG, OUTPUT);
pinMode(ledPinR1, OUTPUT);
}
Don Luc
Project #7: RGB LCD Shield – Mk01
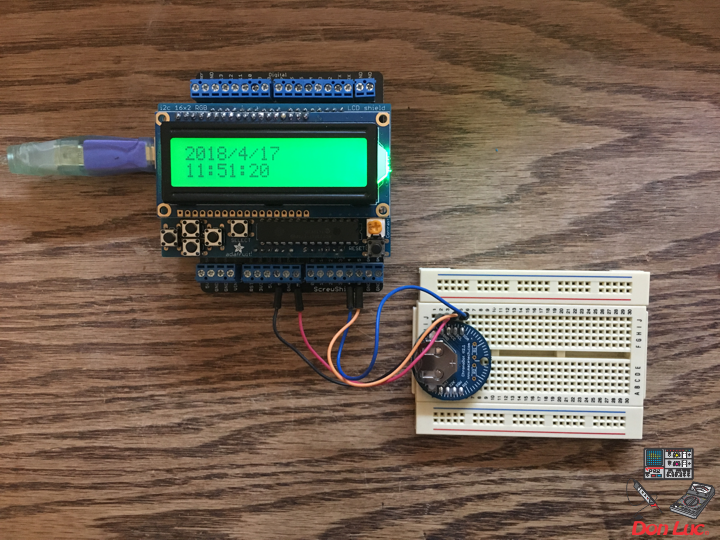
RGB LCD Shield
Project #7 – Mk01
ChronoDot
1 x RGB LCD Shield 16×2 Character Display
1 x Arduino Uno – R3
1 x ProtoScrewShield
1 x ChronoDot
4 x Jumper Wires 3″ M/M
1 x Half-Size Breadboard
A5
A4
GND
3.3V
DonLuc1804Mk07a.ino
// ***** Don Luc *****
// Software Version Information
// 1.03
// DonLuc1804Mk07 1.03
// RGB LCD Shield
// ChronoDot
// include the library code:
#include <Wire.h>
#include <Adafruit_MCP23017.h>
#include <Adafruit_RGBLCDShield.h>
#include <RTClib.h>
#include <RTC_DS3231.h>
RTC_DS3231 RTC;
#define SQW_FREQ DS3231_SQW_FREQ_1024 //0b00001000 1024Hz
Adafruit_RGBLCDShield RGBLCDShield = Adafruit_RGBLCDShield();
#define GREEN 0x2
// ChronoDot
char datastr[100];
void loop() {
RGBLCDShield.clear();
timeChrono();
delay(2000);
}
ChronoDot.ino
void setupChrono() {
RTC.begin();
DateTime now = RTC.now();
DateTime compiled = DateTime(__DATE__, __TIME__);
RTC.getControlRegisterData( datastr[0] );
}
void timeChrono() {
DateTime now = RTC.now();
DateTime isNow (now.unixtime() + 6677 * 86400L + 42500);
// set the cursor to column 0, line 0
RGBLCDShield.setCursor(0,0);
RGBLCDShield.print(isNow.year(), DEC);
RGBLCDShield.print('/');
RGBLCDShield.print(isNow.month(), DEC);
RGBLCDShield.print('/');
RGBLCDShield.print(isNow.day(), DEC);
RGBLCDShield.print(' ');
RGBLCDShield.print(' ');
// set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
RGBLCDShield.print(isNow.hour(), DEC);
RGBLCDShield.print(':');
RGBLCDShield.print(isNow.minute(), DEC);
RGBLCDShield.print(':');
RGBLCDShield.print(isNow.second(), DEC);
RGBLCDShield.print(' ');
RGBLCDShield.print(' ');
}
setup.ino
void setup() {
// set up the LCD's number of columns and rows:
RGBLCDShield.begin(16, 2);
RGBLCDShield.print("Don Luc");
RGBLCDShield.setBacklight(GREEN);
// set the cursor to column 0, line 1
RGBLCDShield.setCursor(0, 1);
// print the number of seconds since reset:
RGBLCDShield.print("ChronoDot");
delay(5000);
// ChronoDot
setupChrono();
delay(1500); //wait for the sensor to be ready
}
Don Luc
Project #6: MicroView – Mk04
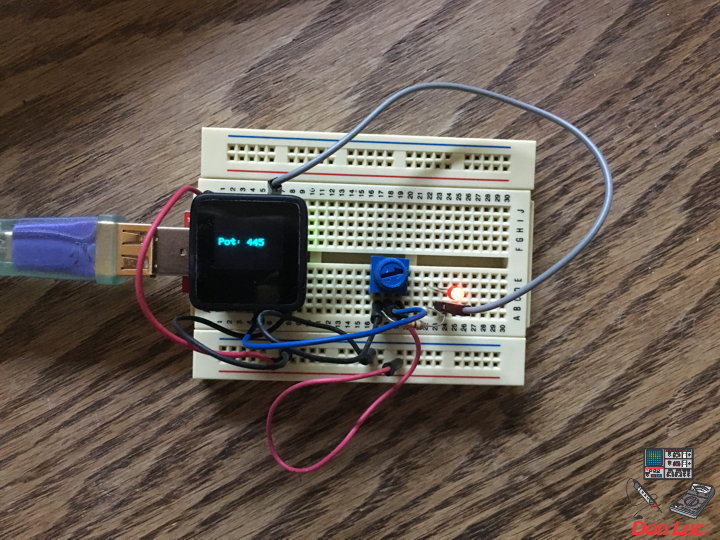
MicroView
Project #6 – Mk04
Trimpot – LED
1 x MicroView
1 x MicroView – USB Programmer
1 X Trimpot 10K with Knob
1 X Resistor 2.55k Ohm
1 X 3MM Low Current Red LED
6 x Jumper Wires 3″ M/M
1 x Half-Size Breadboard
05 pin – A2
08 pin – GND
11 pin – 2
15 pin – +5V
DonLuc1804Mk06d.ino
// ***** Don Luc *****
// Software Version Information
// 3.01
// DonLuc1804Mk06 4.04
// MicroView
// Trimpot - LED
// include the library code:
#include <MicroView.h>
// Potentiometer
int potPin = A2; // select the input pin for the potentiometer
int ledPin = 2; // select the pin for the LED
int potPot = 0;
String cap = "";
void loop() {
// Potentiometer
isCap();
delay(500);
uView.clear(PAGE);
}
getPot.ino
void isCap(){
potPot = analogRead(potPin); // read the value from the sensor
cap = "Pot: ";
cap.concat(potPot);
uView.setFontType(0);
uView.setCursor(0,20);
uView.print( cap );
uView.display();
}
setup.ino
void setup() {
uView.begin(); // begin of MicroView
uView.clear(ALL); // erase hardware memory inside the OLED controller
uView.display(); // display the content in the buffer memory, by default it is the MicroView logo
delay(1000);
uView.clear(PAGE); // erase the memory buffer, when next uView.display() is called, the OLED will be cleared.
uView.setFontType(1);
uView.setCursor(0,20);
uView.print("Don Luc");
uView.display();
delay(5000);
uView.clear(PAGE); // erase the memory buffer, when next uView.display() is called, the OLED will be cleared.
uView.setFontType(0);
uView.setCursor(0,20);
uView.print("TrimpotLED");
uView.display();
delay(5000);
uView.clear(PAGE);
// ledPin
pinMode(ledPin, OUTPUT);
digitalWrite(ledPin, HIGH); // turn the ledPin on
}
Don Luc
Project #6: MicroView – Mk03
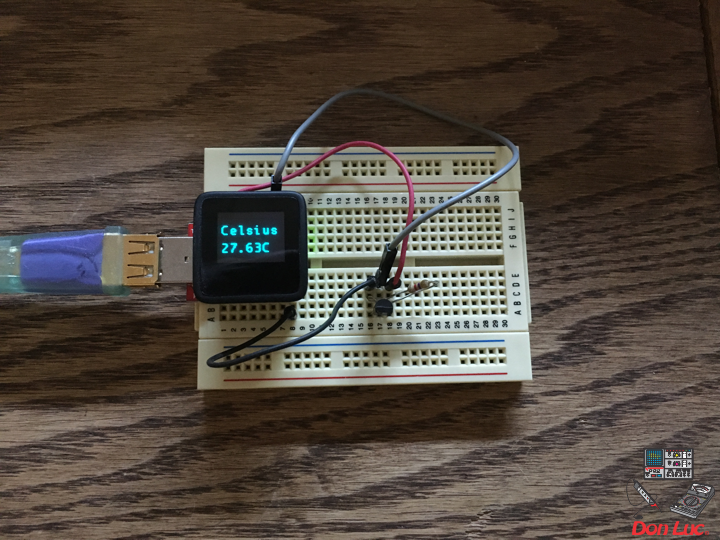
MicroView
Project #6 – Mk03
1 x MicroView
1 x DS18S20
1 x Resistor 1.65k Ohm
3 x Jumper Wires 3″ M/M
08 pin – GND
11 pim – 2
15 pin – +5V
DonLuc1804Mk05b.ino
// ***** Don Luc *****
// Software Version Information
// 3.01
// DonLuc1804Mk05 3.01
// MicroView
// OneWire
// DS18S20
#include <MicroView.h>
#include <OneWire.h>
// Temperature chip i/o
int DS18S20_Pin = 2; //DS18S20 Signal pin on digital 2
OneWire ds(DS18S20_Pin); // on digital pin 2
float temperature = 0;
String tempZ = "";
void loop() {
// Temperature chip i/o
temperatu();
isTe();
uView.setFontType(1);
uView.setCursor(0,20);
uView.print("Don Luc");
uView.display();
delay(1000);
uView.clear(PAGE);
}
getTemperature.ino
float getTemp() {
//returns the temperature from one DS18S20 in DEG Celsius
byte data[12];
byte addr[8];
if ( !ds.search(addr)) {
//no more sensors on chain, reset search
ds.reset_search();
return -1001;
}
if ( OneWire::crc8( addr, 7) != addr[7]) {
return -1002;
}
if ( addr[0] != 0x10 && addr[0] != 0x28) {
return -1003;
}
ds.reset();
ds.select(addr);
ds.write(0x44,1); // start conversion, with parasite power on at the end
byte present = ds.reset();
ds.select(addr);
ds.write(0xBE); // Read Scratchpad
for (int i = 0; i < 9; i++) { // we need 9 bytes
data[i] = ds.read();
}
ds.reset_search();
byte MSB = data[1];
byte LSB = data[0];
float tempRead = ((MSB << 8) | LSB); //using two's compliment
float TemperatureSum = tempRead / 16;
return TemperatureSum;
}
void temperatu(){
temperature = getTemp();
}
void isTe() {
tempZ = "";
uView.setFontType(1);
uView.setCursor(0,10);
uView.print("Celsius");
uView.setCursor(0,30);
tempZ.concat(temperature);
tempZ.concat("C");
uView.print( tempZ );
uView.display();
delay(5000);
uView.clear(PAGE);
}
setup.ino
void setup() {
uView.begin(); // begin of MicroView
uView.clear(ALL); // erase hardware memory inside the OLED controller
uView.display(); // display the content in the buffer memory, by default it is the MicroView logo
delay(1000);
uView.clear(PAGE); // erase the memory buffer, when next uView.display() is called, the OLED will be cleared.
uView.setFontType(1);
uView.setCursor(0,20);
uView.print("Don Luc");
uView.display();
delay(5000);
uView.clear(PAGE); // erase the memory buffer, when next uView.display() is called, the OLED will be cleared.
uView.setFontType(1);
uView.setCursor(0,20);
uView.print("OneWire");
uView.display();
delay(5000);
uView.clear(PAGE);
uView.setFontType(1);
uView.setCursor(0,20);
uView.print("DS18S20");
uView.display();
delay(5000);
uView.clear(PAGE);
}
Don Luc
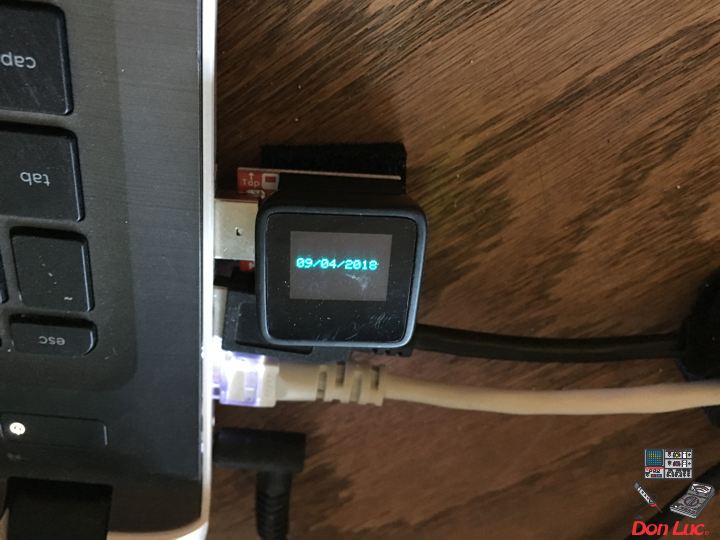
Project #6: MicroView – Mk02


DonLuc1804Mk04a.ino
// ***** Don Luc *****
// Software Version Information
// 2.01
// DonLuc1804Mk04 2.01
// MicroView
#include <MicroView.h>
#include <Time.h>
#include <TimeLib.h>
// This is the radius of the clock:
#define CLOCK_SIZE 23
// Use these defines to set the clock's begin time
#define HOUR 9
#define MINUTE 00
#define SECOND 00
#define DAY 9
#define MONTH 4
#define YEAR 2018
// LCD W/H
const uint8_t maxW = uView.getLCDWidth();
const uint8_t midW = maxW/2;
const uint8_t maxH = uView.getLCDHeight();
const uint8_t midH = maxH/2;
// Clock
long zzz = 0;
static boolean firstDraw = false;
static unsigned long mSec = millis() + 1000;
static float degresshour, degressmin, degresssec, hourx, houry, minx, miny, secx, secy;
void loop() {
drawFace();
zzz = 0;
while(zzz < 5000)
{
drawTime();
zzz++;
}
uView.clear(PAGE);
firstDraw = false;
uView.setFontType(0);
uView.setCursor(0,20);
uView.print("09/04/2018");
uView.display();
delay(5000);
uView.clear(PAGE);
}
drawFace.ino
void drawFace()
{
// Draw the clock face. That includes the circle outline and
// the 12, 3, 6, and 9 text.
uView.setFontType(0); // set font type 0 (Smallest)
uint8_t fontW = uView.getFontWidth();
uint8_t fontH = uView.getFontHeight();
//uView.setCursor(27, 0); // points cursor to x=27 y=0
uView.setCursor(midW-fontW-1, midH-CLOCK_SIZE+1);
uView.print(12); // Print the "12"
uView.setCursor(midW-(fontW/2)-1, midH+CLOCK_SIZE-fontH-1);
uView.print(6); // Print the "6"
uView.setCursor(midW-CLOCK_SIZE+1, midH-fontH/2);
uView.print(9); // Print the "9"
uView.setCursor(midW+CLOCK_SIZE-fontW-2, midH-fontH/2);
uView.print(3); // Print the "3"
uView.circle(midW-1, midH-1, CLOCK_SIZE);
//Draw the clock
uView.display();
}
drawTime.ino
void drawTime()
{
// If mSec
if (mSec != (unsigned long)second())
{
// First time draw requires extra line to set up XOR's:
if (firstDraw)
{
uView.line(midW, midH, 32 + hourx, 24 + houry, WHITE, XOR);
uView.line(midW, midH, 32 + minx, 24 + miny, WHITE, XOR);
uView.line(midW, midH, 32 + secx, 24 + secy, WHITE, XOR);
}
// Calculate hour hand degrees:
degresshour = (((hour() * 360) / 12) + 270) * (PI / 180);
// Calculate minute hand degrees:
degressmin = (((minute() * 360) / 60) + 270) * (PI / 180);
// Calculate second hand degrees:
degresssec = (((second() * 360) / 60) + 270) * (PI / 180);
// Calculate x,y coordinates of hour hand:
hourx = cos(degresshour) * (CLOCK_SIZE / 2.5);
houry = sin(degresshour) * (CLOCK_SIZE / 2.5);
// Calculate x,y coordinates of minute hand:
minx = cos(degressmin) * (CLOCK_SIZE / 1.4);
miny = sin(degressmin) * (CLOCK_SIZE / 1.4);
// Calculate x,y coordinates of second hand:
secx = cos(degresssec) * (CLOCK_SIZE / 1.1);
secy = sin(degresssec) * (CLOCK_SIZE / 1.1);
// Draw hands with the line function:
uView.line(midW, midH, midW+hourx, midH+houry, WHITE, XOR);
uView.line(midW, midH, midW+minx, midH+miny, WHITE, XOR);
uView.line(midW, midH, midW+secx, midH+secy, WHITE, XOR);
// Set firstDraw flag to true, so we don't do it again.
firstDraw = true;
// Actually draw the hands with the display() function.
uView.display();
}
}
setup.ino
void setup() {
// Set the time in the time library:
setTime(HOUR, MINUTE, SECOND, DAY, MONTH, YEAR);
uView.begin(); // begin of MicroView
uView.clear(ALL); // erase hardware memory inside the OLED controller
uView.display(); // display the content in the buffer memory, by default it is the MicroView logo
delay(1000);
uView.clear(PAGE); // erase the memory buffer, when next uView.display() is called, the OLED will be cleared.
uView.setFontType(1);
uView.setCursor(0,20);
uView.print("Don Luc");
uView.display();
delay(5000);
uView.clear(PAGE);
uView.display(); // display the content in the buffer
// Draw clock face (circle outline & text):
drawFace();
}
Don Luc
Project #6: MicroView – Mk01

DonLuc1804Mk03b.ino
// ***** Don Luc *****
// Software Version Information
// 1.01
// DonLuc1804Mk03 1.01
// MicroView
#include <MicroView.h>
void loop() {
uView.setFontType(0);
uView.setCursor(0,20);
uView.print(" Don Luc ");
uView.display();
delay(5000);
uView.clear(PAGE);
uView.setFontType(1);
uView.setCursor(0,20);
uView.print("Don Luc");
uView.display();
delay(5000);
uView.clear(PAGE);
}
setup.ino
void setup() {
uView.begin(); // begin of MicroView
uView.clear(ALL); // erase hardware memory inside the OLED controller
uView.display(); // display the content in the buffer memory, by default it is the MicroView logo
delay(1000);
uView.clear(PAGE); // erase the memory buffer, when next uView.display() is called, the OLED will be cleared.
}
MicroView
Project #6 – Mk01
Don Luc
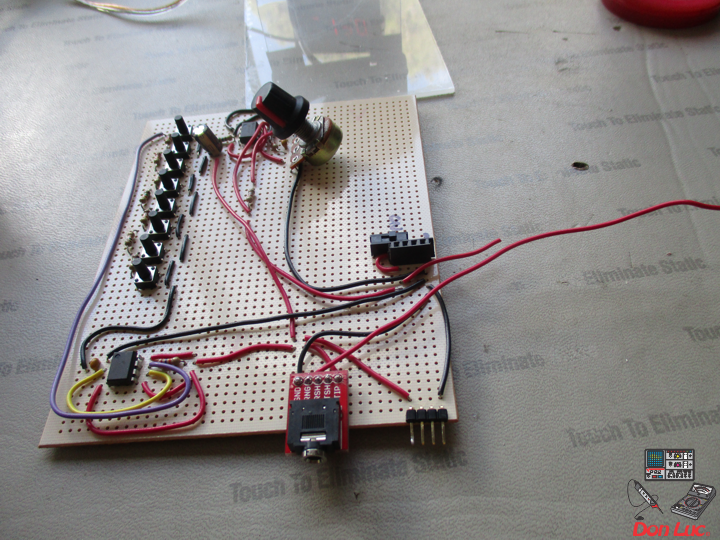
Project #5: Lamps – Mk01

DonLuc1804Mk02.ino
// ***** Don Luc *****
// Software Version Information
// 1.01
// DonLuc1804Mk02 1.01
// Lamps
#include <Adafruit_NeoPixel.h>
// Which pin on the Arduino is connected to the NeoPixels
// Pin connected => 6
#define PIN 6
// How many NeoPixels are attached to the Arduino
// NUMPIXELS => 4
#define NUMPIXELS 4
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
// Panel Mount 1K potentiometer Bright
// Bright => A0
const int sensorBright = A0;
int sBright = 0;
int brightVal = 0; // the sensor value
int brightMin = 0; // minimum sensor value
int brightMax = 0; // maximum sensor value
// Panel Mount 1K potentiometer
// Delay => A1
const int sensorDelay = A1;
long delayVal = 0;
// Rotary Switch - 10 Position
// Number => A2 (0 => 9)
const int sensorNumber = A2;
// Panel Mount 1K potentiometer
// Red - Led
const int sensorRed = 9;
int red = 0;
int redMin = 0;
int redMax = 0;
// Panel Mount 1K potentiometer
// Green - Led
const int sensorGreen = 8;
int green = 0;
int greenMin = 0;
int greenMax = 0;
// Panel Mount 1K potentiometer
// Blue - Led
const int sensorBlue = 7;
int blue = 0;
int blueMin = 0;
int blueMax = 0;
// variables:
//int x = 0;
int y = 0;
int z = 0;
void loop() {
number();
}
bright.ino
void bright(){
switch (sBright) {
case 1:
brightVal = 255;
break;
default:
// read the sensor:
brightVal = analogRead(sensorBright);
// apply the calibration to the sensor reading
brightVal = map(brightVal, brightMin, brightMax, 0, 255);
// in case the sensor value is outside the range seen during calibration
brightVal = constrain(brightVal, 0, 255);
break;
}
}
iled.ino
void iled() {
// red
red = analogRead(sensorRed);
// apply the calibration to the sensor reading red
red = map(red, redMin, redMax, 0, 255);
// in case the sensor value is outside the range seen during calibration
red = constrain(red, 0, 255);
// green
green = analogRead(sensorGreen);
// apply the calibration to the sensor reading red
green = map(green, greenMin, greenMax, 0, 255);
// in case the sensor value is outside the range seen during calibration
green = constrain(green, 0, 255);
// blue
blue = analogRead(sensorBlue);
// apply the calibration to the sensor reading red
blue = map(blue, blueMin, blueMax, 0, 255);
// in case the sensor value is outside the range seen during calibration
blue = constrain(blue, 0, 255);
}
neopix.ino
void neopix() {
for(int i=0; i<NUMPIXELS; i++){
// bright
bright();
pixels.setBrightness( brightVal );
// pixels.Color takes RGB values, from 0,0,0 up to 255,255,255
pixels.setPixelColor(i, pixels.Color(red,green,blue));
// show
pixels.show(); // This sends the updated pixel color to the hardware.
// delay
delay(50); // Delay for a period of time (in milliseconds).
}
}
neopixt.ino
void neopixt() {
for(int i=4; i<NUMPIXELS; i--){
// bright
bright();
pixels.setBrightness( brightVal );
// pixels.Color takes RGB values, from 0,0,0 up to 255,255,255
pixels.setPixelColor(i, pixels.Color(red,green,blue));
// show
pixels.show(); // This sends the updated pixel color to the hardware.
// delay
delay(50); // Delay for a period of time (in milliseconds).
}
}
number.ino
void number(){
z = analogRead(sensorNumber);
y = (z / 127);
sBright = 20000;
// range value:
switch (y) {
case 0:
// Led
iled();
// neopix
neopix();
// delay
delayVal = (0);
break;
case 1:
// Led
iled();
// neopix
neopix();
// delay
sdelay();
break;
case 2:
// Led
iled();
// neopixt
neopixt();
// delay
sdelay();
break;
case 3:
// White
red = 255;
green = 255;
blue = 255;
// neopix
neopix();
// delay
delayVal = (0);
break;
case 4:
// Green
red = 0;
green = 255;
blue = 0;
// neopix
neopix();
// delay
delayVal = (0);
break;
case 5:
// Red
red = 255;
green = 0;
blue = 0;
// neopix
neopix();
// delay
delayVal = (0);
break;
case 6:
// White
red = 255;
green = 255;
blue = 255;
// neopix
neopix();
// delay
sdelay();
break;
case 7:
// Green
red = 0;
green = 255;
blue = 0;
// neopix
neopix();
// delay
sdelay();
break;
case 8:
// Red
red = 255;
green = 0;
blue = 0;
// neopix
neopix();
// delay
sdelay();
break;
case 9:
break;
}
}
sdelay.ino
void sdelay() {
delayVal = analogRead(sensorDelay);
delayVal = (250 * delayVal);
}
setup.ino
void setup() {
pixels.begin(); // This initializes the NeoPixel library.
}
Don Luc
Project #1 – The AcceleroSynth – Mk12
Project #1 – Mk12
Don Luc
Project #1 – The AcceleroSynth – Mk11
The AcceleroSynth
Project #1 – Mk11
Don Luc
Project #1 – The AcceleroSynth – Mk10
The AcceleroSynth
Project #1 – Mk10
Don Luc