Battery
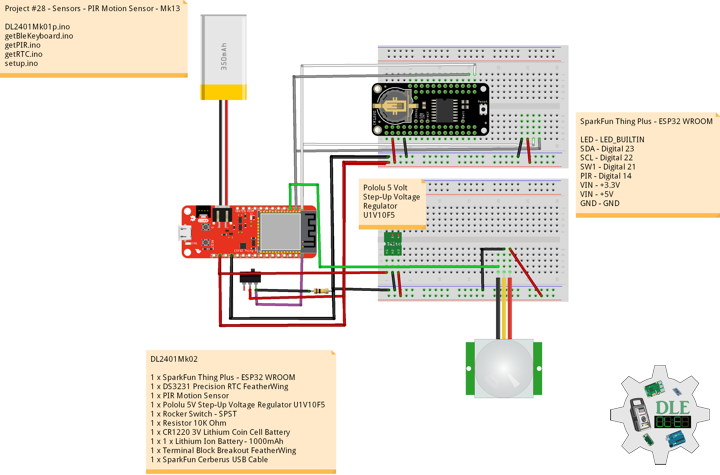
Project #28 – Sensors – PIR Motion Sensor – Mk13
——
#DonLucElectronics #DonLuc #Sensors #PIR #Adafruit #SparkFun #Pololu #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
PIR Motion Sensor (JST)
This is a simple to use motion sensor. Power it up and wait 1-2 seconds for the sensor to get a snapshot of the still room. If anything moves after that period, the “Alarm” pin will go low. This unit works great from 5 to 12 Volt. The alarm pin is an open collector meaning you will need a pull up resistor on the alarm pin. The open drain setup allows multiple motion sensors to be connected on a single input pin. If any of the motion sensors go off, the input pin will be pulled low.
At their most fundamental level, PIR sensor’s are infrared-sensitive light detectors. By monitoring light in the infrared spectrum, PIR sensors can sense subtle changes in temperature across the area they’re viewing. When a human or some other object comes into the PIR’s field-of-view, the radiation pattern changes, and the PIR interprets that change as movement. All that’s left for us to connect is three pins: power, ground, and the output signal.
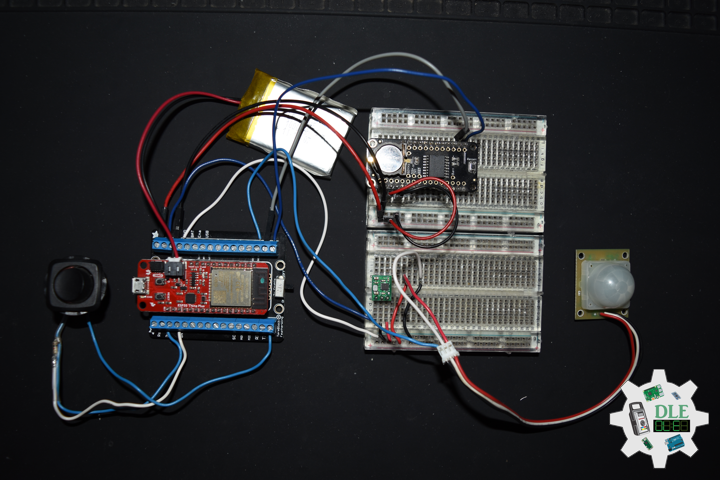
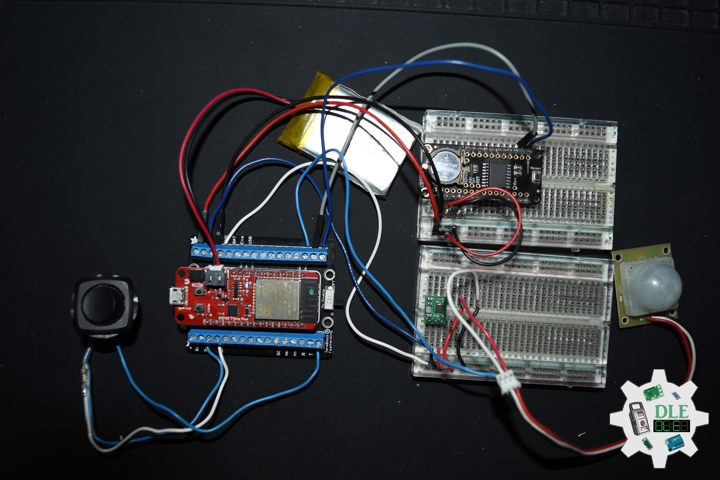
DL2401Mk02
1 x SparkFun Thing Plus – ESP32 WROOM
1 x DS3231 Precision RTC FeatherWing
1 x PIR Motion Sensor
1 x Pololu 5V Step-Up Voltage Regulator U1V10F5
1 x Rocker Switch – SPST
1 x Resistor 10K Ohm
1 x CR1220 3V Lithium Coin Cell Battery
1 x 1 x Lithium Ion Battery – 1000mAh
1 x Terminal Block Breakout FeatherWing
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
LED – LED_BUILTIN
SDA – Digital 23
SCL – Digital 22
SW1 – Digital 21
PIR – Digital 14
VIN – +3.3V
VIN – +5V
GND – GND
——
DL2401Mk01p.ino
/****** Don Luc Electronics © ******
Software Version Information
Project #28 - Sensors - PIR Motion Sensor - Mk13
28-13
DL2401Mk01p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x DS3231 Precision RTC FeatherWing
1 x PIR Motion Sensor
1 x Pololu 5V Step-Up Voltage Regulator U1V10F5
1 x Rocker Switch - SPST
1 x Resistor 10K Ohm
1 x Lithium Ion Battery - 1000mAh
1 x CR1220 3V Lithium Coin Cell Battery
1 x Terminal Block Breakout FeatherWing
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Bluetooth LE keyboard
#include <BleKeyboard.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// Serial Peripheral Interface
#include <SPI.h>
// DS3231 Precision RTC
#include <RTClib.h>
// Bluetooth LE Keyboard
BleKeyboard bleKeyboard;
String sKeyboard = "";
// Send Size
byte sendSize = 0;
// DS3231 Precision RTC
RTC_DS3231 rtc;
String dateRTC = "";
String timeRTC = "";
// PIR Motion
// Motion detector
const int iMotion = 14;
// Proximity
int proximity = LOW;
String Det = "";
// The number of the Rocker Switch pin
int iSwitch = 21;
// Variable for reading the button status
int SwitchState = 0;
// Software Version Information
String sver = "28-13";
void loop() {
// Date and Time RTC
isRTC ();
// isPIR Motion
isPIR();
// Read the state of the Switch value:
SwitchState = digitalRead(iSwitch);
// Check if the button is pressed. If it is, the SwitchState is HIGH:
if (SwitchState == HIGH) {
// Bluetooth LE Keyboard
isBluetooth();
}
// Delay 1 Second
delay(1000);
}
getBleKeyboard.ino
// Ble Keyboard
// Bluetooth
// isBluetooth
void isBluetooth() {
// ESP32 BLE Keyboard
if(bleKeyboard.isConnected()) {
// Send Size Length
sendSize = sKeyboard.length();
// Send Size, charAt
for(byte i = 0; i < sendSize+1; i++){
// Write
bleKeyboard.write(sKeyboard.charAt(i));
delay(50);
}
bleKeyboard.write(KEY_RETURN);
}
}
getPIR.ino
// PIR Motion
// Setup PIR
void setupPIR() {
// Setup PIR Montion
pinMode(iMotion, INPUT_PULLUP);
}
// isPIR Motion
void isPIR() {
// Proximity
proximity = digitalRead(iMotion);
if (proximity == LOW)
{
// PIR Motion Sensor's LOW, Motion is detected
Det = "Motion Yes";
}
else
{
// PIR Motion Sensor's HIGH
Det = "No";
}
sKeyboard = sKeyboard + String(Det) + "|*";
}
getRTC.ino
// Date & Time
// DS3231 Precision RTC
void isSetupRTC() {
// DS3231 Precision RTC
if (! rtc.begin()) {
//Serial.println("Couldn't find RTC");
//Serial.flush();
while (1) delay(10);
}
if (rtc.lostPower()) {
//Serial.println("RTC lost power, let's set the time!");
// When time needs to be set on a new device, or after a power loss, the
// following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
//rtc.adjust(DateTime(2023, 8, 10, 11, 0, 0));
}
}
// Date and Time RTC
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.day(), DEC;
// Time
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.second(), DEC;
// bleKeyboard
sKeyboard = "SEN|" + sver + "|" + String(dateRTC)
+ "|" + String(timeRTC) + "|";
}
setup.ino
// Setup
void setup()
{
// Give display time to power on
delay(100);
// Bluetooth LE keyboard
bleKeyboard.begin();
// Wire - Inialize I2C Hardware
Wire.begin();
// Give display time to power on
delay(100);
// Date & Time RTC
// DS3231 Precision RTC
isSetupRTC();
// Give display time to power on
delay(100);
// PIR Motion
// Setup PIR
setupPIR();
// Initialize the Switch pin as an input
pinMode(iSwitch, INPUT);
// Initialize digital pin LED_BUILTIN as an output
pinMode(LED_BUILTIN, OUTPUT);
// Turn the LED on HIGH
digitalWrite(LED_BUILTIN, HIGH);
// Delay 5 Second
delay( 5000 );
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2024
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
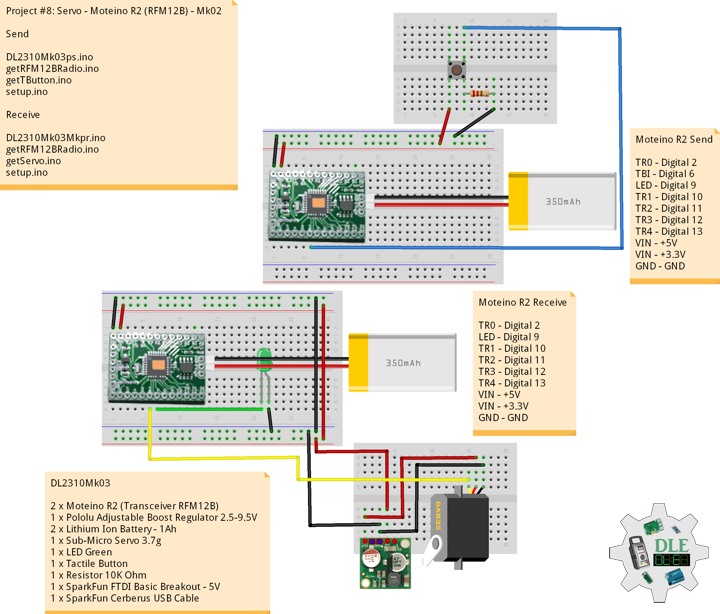
Project #8: Servo – Moteino R2 (RFM12B) – Mk02
——
#DonLucElectronics #DonLuc #Servo #Moteino #Transceiver #RadioFrequency #Pololu #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Moteino
Moteino began as a low power wireless Arduino compatible development platform based on the popular ATmega328p chip used in the Arduino UNO. There are now several Moteino development boards including MoteinoMEGA based on the Atmega1284P and MoteinoM0 based on the SAMD21G18 Cortex M0+. For programming you will need an external FTDI-Adapter to load sketches, the advantages being lower cost, smaller size.
Servo Motor
A servo motor is a rotary actuator or linear actuator that allows for precise control of angular or linear position, velocity and acceleration. It consists of a suitable motor coupled to a sensor for position feedback. It also requires a relatively sophisticated controller, often a dedicated module designed specifically for use with servo motors.
Servo motors have been around for a long time and are utilized in many applications. They are small in size but pack a big punch and are very energy-efficient. These features allow them to be used to operate remote-controlled or radio-controlled toy cars, robots and airplanes. Servo motors are also used in industrial applications, robotics, in-line manufacturing, pharmaceutics and food services.
Pololu Adjustable Boost Regulator 2.5-9.5 Volt
This powerful, adjustable boost regulator can generate an output voltage as high as 9.5 Volt from an input voltage as low as 1.5 Volt, all in a compact. A trimmer potentiometer lets you set the boost regulator’s output voltage to a value between 2.5 and 9.5 Volt.
DL2310Mk03
2 x Moteino R2 (Transceiver RFM12B)
1 x Pololu Adjustable Boost Regulator 2.5-9.5V
2 x Lithium Ion Battery – 1Ah
1 x Sub-Micro Servo 3.7g
1 x LED Green
1 x Tactile Button
1 x Resistor 10K Ohm
1 x SparkFun FTDI Basic Breakout – 5V
1 x SparkFun Cerberus USB Cable
Moteino R2 (Send)
TR0 – Digital 2
TBI – Digital 6
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
VIN – +5V
VIN – +3.3V
GND – GND
——
DL2310Mk03ps.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #8: Servo - Radio Frequency - Mk02
6-02
Send
DL2310Mk03ps.ino
2 x Moteino R2 (Transceiver RFM12B)
1 x Pololu Adjustable Boost Regulator 2.5-9.5V
2 x Lithium Ion Battery - 1Ah
1 x Sub-Micro Servo 3.7g
1 x LED Green
1 x Tactile Button
1 x Resistor 10K Ohm
1 x SparkFun FTDI Basic Breakout - 5V
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Sleep
#include <avr/sleep.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 2
// The network ID we are on
#define NETWORKID 99
// The node ID we're sending to
#define GATEWAYID 1
// # of ms to wait for an ack
#define ACK_TIME 50
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Wait this many ms between sending packets
int interPacketDelay = 50;
// Input
char input = 0;
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Send Size
byte sendSize = 0;
// Payload
char payload[100];
// Request ACK
bool requestACK = false;
// LED
int iLED = 9;
// The number of the Tactile Button pin
int iTButton = 6;
// Variable for reading the button status
int TButtonState = 0;
// The previous reading from the input pin
int lastTButtonState = LOW;
// The following variables are unsigned longs
// because the time, measured in
// milliseconds, will quickly become a bigger
// number than can be stored in an int.
// The last time the output pin was toggled
unsigned long lastDebounceTime = 0;
// The debounce time; increase if the output flickers
unsigned long debounceDelay = 50;
// String
String zzzzzz = "";
int iSER = 0;
// Software Version Information
String sver = "8-02";
void loop()
{
// Tactile Button
isTButton();
// is RFM12B Radio
isRFM12BRadio();
// Inter Packet Delay
delay(interPacketDelay);
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio(){
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Sleep right away to save power
radio.Sleep();
// Transmitting
Serial.println("Transmitting...\n\n");
}
// is RFM12 BRadio
void isRFM12BRadio(){
// zzzzzz ""
zzzzzz = "";
// zzzzz = "<SER|" + iSER + "|*";
zzzzzz = "<SER|";
zzzzzz = zzzzzz + iSER;
zzzzzz = zzzzzz + "|*";
// sendSize Length
sendSize = zzzzzz.length();
// sendSize
payload[sendSize];
// sendSize, charAt
for(byte i = 0; i < sendSize+1; i++){
payload[i] = zzzzzz.charAt(i);
}
// payload
Serial.print(payload);
// Request ACK
requestACK = sendSize;
// Wakeup
radio.Wakeup();
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// Send
radio.Send(GATEWAYID, payload, sendSize, requestACK);
// Request ACK
if (requestACK)
{
Serial.print(" - waiting for ACK...");
if (waitForAck()){
Serial.print("Ok!");
}
else Serial.print("nothing...");
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
// Sleep
radio.Sleep();
// Serial
Serial.println();
}
// Wait a few milliseconds for proper ACK, return true if received
static bool waitForAck(){
// Now
long now = millis();
// ACK
while (millis() - now <= ACK_TIME){
if (radio.ACKReceived(GATEWAYID)){
return true;
}
}
return false;
}
getTButton.ino
// Tactile Button
void isTButton(){
// Read the state of the Button value:
int reading = digitalRead(iTButton);
// Check to see if you just pressed the TButton
// (i.e. the input went from LOW to HIGH), and you've waited long enough
// since the last press to ignore any noise:
// If the TButton changed, due to noise or pressing:
if (reading != lastTButtonState) {
// Reset the debouncing timer
lastDebounceTime = millis();
}
if ((millis() - lastDebounceTime) > debounceDelay) {
// Whatever the reading is at, it's been there for
// longer than the debounce
// delay, so take it as the actual current state:
// if the button state has changed:
if (reading != TButtonState) {
TButtonState = reading;
// Check if the TButton is pressed. If it is, the TButtonState is HIGH:
if (TButtonState == HIGH) {
iSER = 1;
} else {
iSER = 0;
}
}
}
// Save the reading. Next time through the loop,
// it'll be the lastTButtonState:
lastTButtonState = reading;
}
setup.ino
// Setup
void setup(){
// Serial
Serial.begin(SERIAL_BAUD);
// LED
pinMode( iLED , OUTPUT);
// Initialize the Button pin as an input
pinMode(iTButton, INPUT);
// Setup RFM12B Radio
isSetupRFM12BRadio();
}
Moteino R2 (Receive)
TR0 – Digital 2
LED – Digital 9
TR1 – Digital 10
TR2 – Digital 11
TR3 – Digital 12
TR4 – Digital 13
VIN – +5V
VIN – +3.3V
GND – GND
—
DL2310Mk03Mkpr.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #8: Servo - Radio Frequency - Mk02
6-02
Receive
DL2310Mk03pr.ino
2 x Moteino R2 (RFM12B)
1 x Pololu Adjustable Boost Regulator 2.5-9.5V
2 x Lithium Ion Battery - 1Ah
1 x Sub-Micro Servo 3.7g
1 x LED Green
1 x Tactile Button
1 x Resistor 10K Ohm
1 x SparkFun FTDI Basic Breakout - 5V
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// RFM12B Radio
#include <RFM12B.h>
// Servo
#include <Servo.h>
// You will need to initialize the radio by telling it what ID
// it has and what network it's on
// The NodeID takes values from 1-127, 0 is reserved for sending
// broadcast messages (send to all nodes)
// The Network ID takes values from 0-255
// By default the SPI-SS line used is D10 on Atmega328.
// You can change it by calling .SetCS(pin) where pin can be {8,9,10}
// Network ID used for this unit
#define NODEID 1
// The network ID we are on
#define NETWORKID 99
// Serial
#define SERIAL_BAUD 115200
// Encryption is OPTIONAL
// to enable encryption you will need to:
// - provide a 16-byte encryption KEY (same on all nodes that talk encrypted)
// - to call .Encrypt(KEY) to start encrypting
// - to stop encrypting call .Encrypt(NULL)
uint8_t KEY[] = "ABCDABCDABCDABCD";
// Need an instance of the RFM12B Radio Module
RFM12B radio;
// Message
String msg = "";
// Servo
int iSER = 0;
String sSER = "";
int firstClosingBracket = 0;
// LED
int iLED = 9;
int iLEDG = 7;
// Servo control
Servo serv;
const int pinServo = 6;
// Software Version Information
String sver = "8-02";
void loop() {
// is RFM12B Radio
isRFM12BRadio();
}
getRFM12BRadio.ino
// RFM12B Radio
void isSetupRFM12BRadio()
{
// RFM12B Radio
radio.Initialize(NODEID, RF12_433MHZ, NETWORKID);
// Encryption
radio.Encrypt(KEY);
// Transmitting
Serial.println("Listening...");
}
// is RFM12 BRadio
void isRFM12BRadio()
{
// Receive
if (radio.ReceiveComplete())
{
// CRC Pass
if (radio.CRCPass())
{
// Serial
Serial.print('[');
Serial.print(radio.GetSender());
Serial.print("] ");
// Message
msg = "";
// Can also use radio.GetDataLen() if you don't like pointers
for (byte i = 0; i < *radio.DataLen; i++)
{
Serial.print((char)radio.Data[i]);
msg = msg + (char)radio.Data[i];
}
// Turn the LED on HIGH
digitalWrite( iLED , HIGH);
// Servo
isServo();
// ACK Requested
if (radio.ACKRequested())
{
// Send ACK
radio.SendACK();
Serial.print(" - ACK Sent");
}
// Turn the LED on LOW
digitalWrite( iLED , LOW);
}
else
{
// BAD-CRC
Serial.print("BAD-CRC");
}
// Serial
Serial.println();
}
}
getServo.ino
// Servo
void isServo(){
// Message
//Serial.println( msg );
// msg = "<SER|0|*";
firstClosingBracket = 0;
// "<SER|"
firstClosingBracket = msg.indexOf('|');
//Serial.println( msg );
msg.remove(0, 5);
//Serial.println( msg );
// Servo
firstClosingBracket = msg.indexOf('|');
sSER = msg;
sSER.remove(firstClosingBracket);
//Serial.println( sSER );
iSER = sSER.toInt();
//Serial.println( iSER );
int x = iSER;
if (x == 1) {
digitalWrite(iLEDG, HIGH);
// Set servo to unlock
serv.write( 0 );
delay(15);
} else {
digitalWrite(iLEDG, LOW);
// Set servo to lock
serv.write( 90 );
delay(15);
}
}
setup.ino
// Setup
void setup()
{
// Serial
Serial.begin(SERIAL_BAUD);
// LED
pinMode( iLED , OUTPUT);
pinMode( iLEDG , OUTPUT);
// Attach Servo
serv.attach( pinServo );
// RFM12B Radio
isSetupRFM12BRadio();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Teacher, Instructor, E-Mentor, R&D and Consulting
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi, Arm, Silicon Labs, Espressif, Etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Automation
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- Artificial Intelligence (AI)
- RTOS
- eHealth Sensors, Biosensor, and Biometric
- Research & Development (R & D)
- Consulting
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
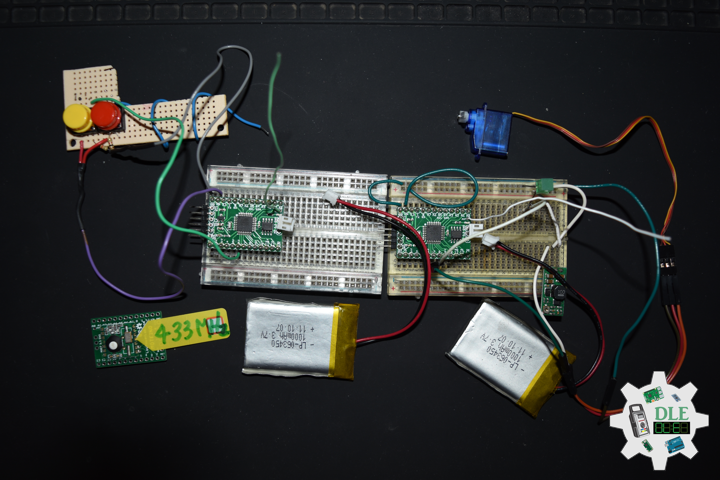
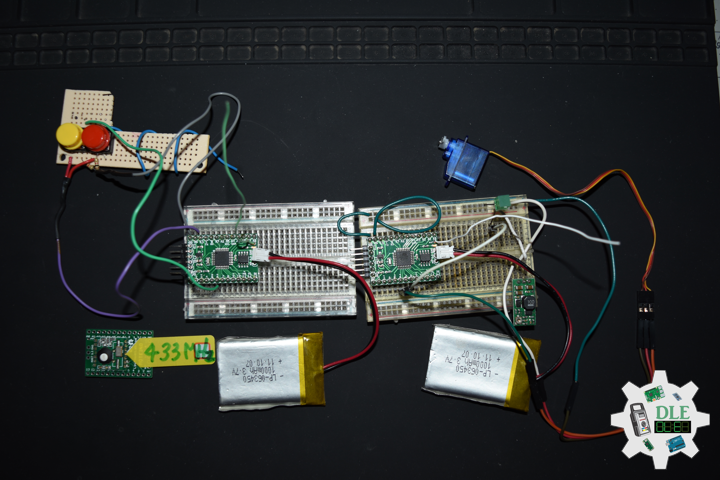
Project #26 – Radio Frequency – Universally Unique IDentifier – Mk27
——
#DonLucElectronics #DonLuc #RadioFrequency #Bluetooth #UUID #Display #SparkFun #Adafruit #BME280 #CCS811 #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
Universally Unique IDentifier
A Universally Unique IDentifier (UUID) is a 128-bit label used for information in computer systems. When generated according to the standard methods, UUIDs are, for practical purposes, unique. Their uniqueness does not depend on a central registration authority or coordination between the parties generating them, unlike most other numbering schemes. While the probability that a UUID will be duplicated is not zero, it is generally considered close enough to zero to be negligible.
Thus, anyone can create a UUID and use it to identify something with near certainty that the identifier does not duplicate one that has already been, or will be, created to identify something else. Information labeled with UUIDs by independent parties can therefore be later combined into a single database or transmitted on the same channel, with a negligible probability of duplication. Adoption of UUIDs is widespread, with many computing platforms providing support for generating them and for parsing their textual representation.
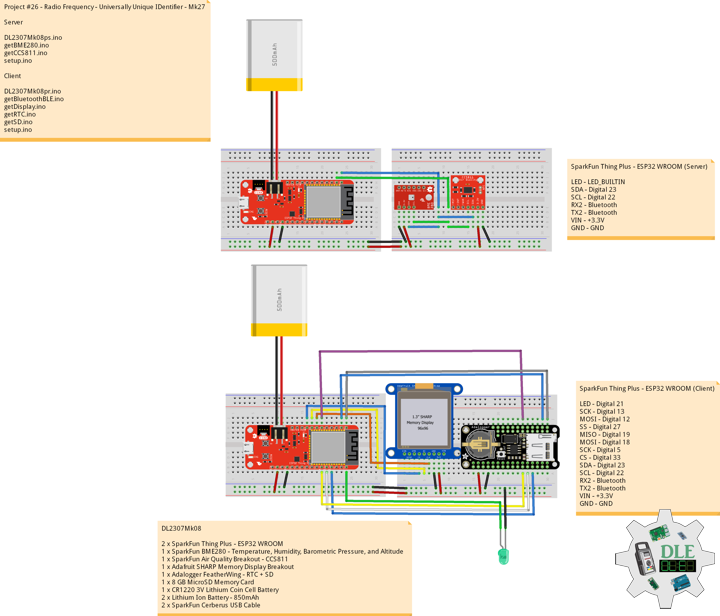
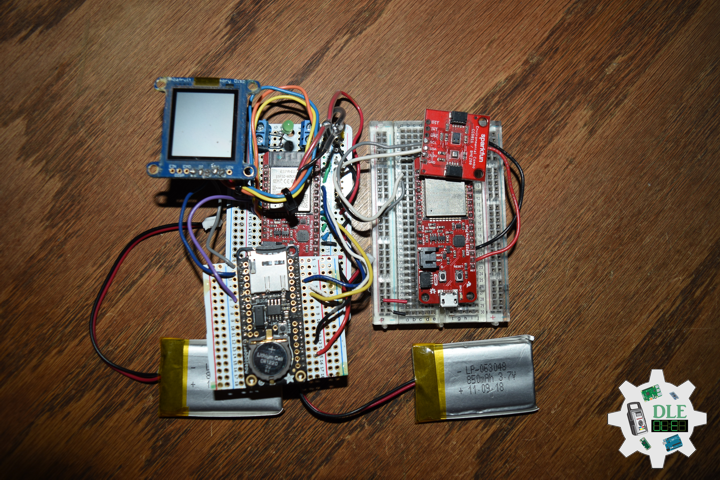
DL2307Mk08
2 x SparkFun Thing Plus – ESP32 WROOM
1 x SparkFun BME280 – Temperature, Humidity, Barometric Pressure, and Altitude
1 x SparkFun Air Quality Breakout – CCS811
1 x Adafruit SHARP Memory Display Breakout
1 x Adalogger FeatherWing – RTC + SD
1 x 8 GB MicroSD Memory Card
1 x CR1220 3V Lithium Coin Cell Battery
2 x Lithium Ion Battery – 850mAh
2 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM (Server)
LED – LED_BUILTIN
SDA – Digital 23
SCL – Digital 22
RX2 – Bluetooth
TX2 – Bluetooth
VIN – +3.3V
GND – GND
——
DL2307Mk08ps.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Universally Unique IDentifier - Mk27
26-27
DL2307Mk08ps.ino
2 x SparkFun Thing Plus - ESP32 WROOM
1 x SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
1 x SparkFun Air Quality Breakout - CCS811
1 x Adafruit SHARP Memory Display Breakout
1 x Adalogger FeatherWing - RTC + SD
1 x 8 GB MicroSD Memory Card
1 x CR1220 3V Lithium Coin Cell Battery
2 x Lithium Ion Battery - 850mAh
2 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// BLE Device
#include <BLEDevice.h>
// BLE Utils
#include <BLEUtils.h>
// BLE Serve
#include <BLEServer.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
#include <SparkFunBME280.h>
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// See the following for generating UUIDs:
// https://www.uuidgenerator.net/
#define SERVICE_UUID "7c394dc4-49a8-4c22-8a5b-b1612d8c13c1"
#define CHARACTERISTIC_UUID "a4c4cec2-f394-4f7a-b9de-89047feca74b"
#define CHARACTERISTIC_TEM_UUID "74bd92c6-89d0-4387-823e-97e7e0fb7a2b"
#define CHARACTERISTIC_HUM_UUID "1b63f246-b97f-4d2e-b8eb-f69e20a23a34"
#define CHARACTERISTIC_BAR_UUID "43788175-37a7-4280-93c6-c690324d088e"
#define CHARACTERISTIC_ALT_UUID "609deed9-a72d-45c3-aaba-14a73b0d8fda"
#define CHARACTERISTIC_ECO_UUID "ab17aace-c0b9-4bd3-bb93-7715d9afaeea"
#define CHARACTERISTIC_VOC_UUID "6a8bf86a-9d40-457c-9f7f-f13a3d6803f1"
// Makes the chracteristic globlal
static BLECharacteristic *pCharacteristicTEM;
static BLECharacteristic *pCharacteristicHUM;
static BLECharacteristic *pCharacteristicBAR;
static BLECharacteristic *pCharacteristicALT;
static BLECharacteristic *pCharacteristicECO;
static BLECharacteristic *pCharacteristicVOC;
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
BME280 myBME280;
float BMEtempC = 0;
float BMEhumid = 0;
float BMEpressure = 0;
float BMEaltitudeM = 0;
String FullString = "";
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
float CCS811CO2 = 0;
float CCS811TVOC = 0;
String FullStringA = "";
// Software Version Information
String sver = "26-27";
void loop() {
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Delay 1 sec
delay(1000);
}
getBME280.ino
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
// isBME280 - Temperature, Humidity, Barometric Pressure, and Altitude
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// setValue takes uint8_t, uint16_t, uint32_t, int, float, double and string
pCharacteristicTEM->setValue(BMEtempC);
pCharacteristicHUM->setValue(BMEhumid);
pCharacteristicBAR->setValue(BMEpressure);
pCharacteristicALT->setValue(BMEaltitudeM);
// FullString
FullString = "Temperature = " + String(BMEtempC,2) + " Humidity = "
+ String(BMEhumid,2) + " Barometric = " + String(BMEpressure,2)
+ " Altitude Meters = " + String(BMEaltitudeM,2) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
// setValue takes uint8_t, uint16_t, uint32_t, int, float, double and string
pCharacteristicECO->setValue(CCS811CO2);
pCharacteristicVOC->setValue(CCS811TVOC);
// FullStringA
FullStringA = "TVOCs = " + String(CCS811TVOC,2) + " eCO2 = "
+ String(CCS811CO2,2) + "\r\n";
// FullStringA Bluetooth Serial + Serial
for(int i = 0; i < FullStringA.length(); i++)
{
// Serial
Serial.write(FullStringA.c_str()[i]);
}
}
setup.ino
// Setup
void setup()
{
// Serial Begin
Serial.begin(115200);
Serial.println("Starting BLE work!");
// Give display time to power on
delay(100);
// Wire - Inialize I2C Hardware
Wire.begin();
// Give display time to power on
delay(100);
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// Initialize digital pin LED_BUILTIN as an output
pinMode(LED_BUILTIN, OUTPUT);
// Turn the LED on HIGH
digitalWrite(LED_BUILTIN, HIGH);
// BLE Device Init
BLEDevice::init("Don Luc Electronics Server");
BLEServer *pServer = BLEDevice::createServer();
BLEService *pService = pServer->createService(SERVICE_UUID);
BLECharacteristic *pCharacteristic = pService->createCharacteristic(
CHARACTERISTIC_UUID,
BLECharacteristic::PROPERTY_READ |
BLECharacteristic::PROPERTY_WRITE
);
pCharacteristicTEM = pService->createCharacteristic(
CHARACTERISTIC_TEM_UUID,
BLECharacteristic::PROPERTY_READ |
BLECharacteristic::PROPERTY_WRITE
);
pCharacteristicHUM = pService->createCharacteristic(
CHARACTERISTIC_HUM_UUID,
BLECharacteristic::PROPERTY_READ |
BLECharacteristic::PROPERTY_WRITE
);
pCharacteristicBAR = pService->createCharacteristic(
CHARACTERISTIC_BAR_UUID,
BLECharacteristic::PROPERTY_READ |
BLECharacteristic::PROPERTY_WRITE
);
pCharacteristicALT = pService->createCharacteristic(
CHARACTERISTIC_ALT_UUID,
BLECharacteristic::PROPERTY_READ |
BLECharacteristic::PROPERTY_WRITE
);
pCharacteristicVOC = pService->createCharacteristic(
CHARACTERISTIC_VOC_UUID,
BLECharacteristic::PROPERTY_READ |
BLECharacteristic::PROPERTY_WRITE
);
pCharacteristicECO = pService->createCharacteristic(
CHARACTERISTIC_ECO_UUID,
BLECharacteristic::PROPERTY_READ |
BLECharacteristic::PROPERTY_WRITE
);
pCharacteristic->setValue("Luc Paquin");
pService->start();
// This still is working for backward compatibility
// BLEAdvertising *pAdvertising = pServer->getAdvertising();
// BLE Advertising
BLEAdvertising *pAdvertising = BLEDevice::getAdvertising();
pAdvertising->addServiceUUID(SERVICE_UUID);
pAdvertising->setScanResponse(true);
// Functions that help with iPhone connections issue
pAdvertising->setMinPreferred(0x06);
pAdvertising->setMinPreferred(0x12);
BLEDevice::startAdvertising();
}
——
SparkFun Thing Plus – ESP32 WROOM (Client)
LED – Digital 21
SCK – Digital 13
MOSI – Digital 12
SS – Digital 27
MISO – Digital 19
MOSI – Digital 18
SCK – Digital 5
CS – Digital 33
SDA – Digital 23
SCL – Digital 22
RX2 – Bluetooth
TX2 – Bluetooth
VIN – +3.3V
GND – GND
——
DL2307Mk08pr.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Universally Unique IDentifier - Mk27
26-27
DL2307Mk08pr.ino
2 x SparkFun Thing Plus - ESP32 WROOM
1 x SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
1 x SparkFun Air Quality Breakout - CCS811
1 x Adafruit SHARP Memory Display Breakout
1 x Adalogger FeatherWing - RTC + SD
1 x 8 GB MicroSD Memory Card
1 x CR1220 3V Lithium Coin Cell Battery
2 x Lithium Ion Battery - 850mAh
2 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Bluetooth BLE Device
#include "BLEDevice.h"
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
// Adafruit GFX Library
#include <Adafruit_GFX.h>
// Date and Time
#include "RTClib.h"
// SD Card
#include "FS.h"
#include "SD.h"
#include "SPI.h"
// SHARP Memory Display
// any pins can be used
#define SHARP_SCK 13
#define SHARP_MOSI 12
#define SHARP_SS 27
// Set the size of the display here, e.g. 144x168!
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices.
#define BLACK 0
#define WHITE 1
// 1/2 of lesser of display width or height
int minorHalfSize;
// The remote service we wish to connect to.
static BLEUUID serviceUUID("7c394dc4-49a8-4c22-8a5b-b1612d8c13c1");
// The characteristic of the remote service we are interested in.
static BLEUUID charUUID("a4c4cec2-f394-4f7a-b9de-89047feca74b");
// Use the same UUID as on the server
static BLEUUID charTEMUUID("74bd92c6-89d0-4387-823e-97e7e0fb7a2b");
static BLEUUID charHUMUUID("1b63f246-b97f-4d2e-b8eb-f69e20a23a34");
static BLEUUID charBARUUID("43788175-37a7-4280-93c6-c690324d088e");
static BLEUUID charALTUUID("609deed9-a72d-45c3-aaba-14a73b0d8fda");
static BLEUUID charECOUUID("ab17aace-c0b9-4bd3-bb93-7715d9afaeea");
static BLEUUID charVOCUUID("6a8bf86a-9d40-457c-9f7f-f13a3d6803f1");
static boolean doConnect = false;
static boolean connected = false;
static boolean doScan = false;
static BLERemoteCharacteristic* pRemoteCharacteristic;
static BLERemoteCharacteristic* pRemoteCharacteristicTEM;
static BLERemoteCharacteristic* pRemoteCharacteristicHUM;
static BLERemoteCharacteristic* pRemoteCharacteristicBAR;
static BLERemoteCharacteristic* pRemoteCharacteristicALT;
static BLERemoteCharacteristic* pRemoteCharacteristicECO;
static BLERemoteCharacteristic* pRemoteCharacteristicVOC;
static BLEAdvertisedDevice* myDevice;
float TEMValue;
float HUMValue;
float BARValue;
float ALTValue;
float ECOValue;
float VOCValue;
int iLED = 21;
// Date and Time
// PCF8523 Precision RTC
RTC_PCF8523 rtc;
String dateRTC = "";
String timeRTC = "";
// microSD Card
const int chipSelect = 33;
String zzzzzz = "";
// Software Version Information
String sver = "26-27";
void loop() {
// Bluetooth BLE
isBluetoothBLE();
// Date and Time
isRTC();
// Display Environmental
isDisplayEnvironmental();
// microSD Card
isSD();
}
getBluetoothBLE.ino
// Bluetooth BLE
// isBluetoothBLE
void isBluetoothBLE(){
// If the flag "doConnect" is true then we have scanned for
// and found the desired
// BLE Server with which we wish to connect. Now we connect to it.
// Once we are connected we set the connected flag to be true.
if (doConnect == true) {
if (connectToServer()) {
Serial.println("We are now connected to the BLE Server.");
} else {
Serial.println("We have failed to connect to the server; there is nothin more we will do.");
}
doConnect = false;
}
// If we are connected to a peer BLE Server, update the characteristic each time we are reached
// with the current time since boot.
if (connected) {
String newValue = "Time since boot: " + String(millis()/1000);
//Serial.println("Setting new characteristic value to \"" + newValue + "\"");
// Set the characteristic's value to be the array of bytes that is actually a string.
// pRemoteCharacteristic->writeValue(newValue.c_str(), newValue.length());//***********JKO
}else if(doScan){
BLEDevice::getScan()->start(0); // this is just example to start scan after disconnect, most likely there is better way to do it in arduino
}
// read the Characteristics and store them in a variable
// This also makes the print command do float handling
TEMValue = pRemoteCharacteristicTEM->readFloat();
HUMValue = pRemoteCharacteristicHUM->readFloat();
BARValue = pRemoteCharacteristicBAR->readFloat();
ALTValue = pRemoteCharacteristicALT->readFloat();
ECOValue = pRemoteCharacteristicECO->readFloat();
VOCValue = pRemoteCharacteristicVOC->readFloat();
}
// Notify Callback
static void notifyCallback(
BLERemoteCharacteristic* pBLERemoteCharacteristic,
uint8_t* pData,
size_t length,
bool isNotify) {
Serial.print("Notify callback for characteristic ");
Serial.print(pBLERemoteCharacteristic->getUUID().toString().c_str());
Serial.print(" of data length ");
Serial.println(length);
Serial.print("data: ");
Serial.println((char*)pData);
}
// My Client Callback
class MyClientCallback : public BLEClientCallbacks {
void onConnect(BLEClient* pclient) {
}
void onDisconnect(BLEClient* pclient) {
connected = false;
Serial.println("onDisconnect");
}
};
// Connect To Server
bool connectToServer() {
Serial.print("Forming a connection to ");
Serial.println(myDevice->getAddress().toString().c_str());
BLEClient* pClient = BLEDevice::createClient();
Serial.println(" - Created client");
pClient->setClientCallbacks(new MyClientCallback());
// Connect to the remove BLE Server.
// if you pass BLEAdvertisedDevice instead of address,
//it will be recognized type of peer device address (public or private)
pClient->connect(myDevice);
Serial.println(" - Connected to server");
//set client to request maximum MTU from server (default is 23 otherwise)
pClient->setMTU(517);
// Obtain a reference to the service we are after in the remote BLE server.
BLERemoteService* pRemoteService = pClient->getService(serviceUUID);
if (pRemoteService == nullptr) {
Serial.print("Failed to find our service UUID: ");
Serial.println(serviceUUID.toString().c_str());
pClient->disconnect();
return false;
}
Serial.println(" - Found our service");
// Obtain a reference to the characteristic in the service of the remote BLE server.
pRemoteCharacteristic = pRemoteService->getCharacteristic(charUUID);
if (pRemoteCharacteristic == nullptr) {
Serial.print("Failed to find our characteristic UUID: ");
Serial.println(charUUID.toString().c_str());
pClient->disconnect();
return false;
}
Serial.println(" - Found our characteristic");
// Temperature Obtain a reference to the characteristic in the service
// of the remote BLE server.
pRemoteCharacteristicTEM = pRemoteService->getCharacteristic(charTEMUUID);
if (pRemoteCharacteristicTEM == nullptr) {
Serial.print("Failed to find our characteristic UUID Temperature: ");
Serial.println(charTEMUUID.toString().c_str());
pClient->disconnect();
return false;
}
// Humidity Obtain a reference to the characteristic in the service
// of the remote BLE server.
pRemoteCharacteristicHUM = pRemoteService->getCharacteristic(charHUMUUID);
if (pRemoteCharacteristicHUM == nullptr) {
Serial.print("Failed to find our characteristic UUID Temperature: ");
Serial.println(charHUMUUID.toString().c_str());
pClient->disconnect();
return false;
}
Serial.println(" - Found our characteristic");
// Barometric Obtain a reference to the characteristic in the service
// of the remote BLE server.
pRemoteCharacteristicBAR = pRemoteService->getCharacteristic(charBARUUID);
if (pRemoteCharacteristicBAR == nullptr) {
Serial.print("Failed to find our characteristic UUID Barometric: ");
Serial.println(charBARUUID.toString().c_str());
pClient->disconnect();
return false;
}
Serial.println(" - Found our characteristic");
// Altitude Obtain a reference to the characteristic in the service
// of the remote BLE server.
pRemoteCharacteristicALT = pRemoteService->getCharacteristic(charALTUUID);
if (pRemoteCharacteristicALT == nullptr) {
Serial.print("Failed to find our characteristic UUID Altitude: ");
Serial.println(charALTUUID.toString().c_str());
pClient->disconnect();
return false;
}
// eCO2 Concentration Obtain a reference to the characteristic in the service
// of the remote BLE server.
pRemoteCharacteristicECO = pRemoteService->getCharacteristic(charECOUUID);
if (pRemoteCharacteristicECO == nullptr) {
Serial.print("Failed to find our characteristic UUID eCO2 Concentration: ");
Serial.println(charECOUUID.toString().c_str());
pClient->disconnect();
return false;
}
Serial.println(" - Found our characteristic");
// tVOC Concentration Obtain a reference to the characteristic in the service
// of the remote BLE server.
pRemoteCharacteristicVOC = pRemoteService->getCharacteristic(charVOCUUID);
if (pRemoteCharacteristicVOC == nullptr) {
Serial.print("Failed to find our characteristic UUID tVOC Concentration: ");
Serial.println(charVOCUUID.toString().c_str());
pClient->disconnect();
return false;
}
Serial.println(" - Found our characteristic");
// Read the value of the characteristic.
if(pRemoteCharacteristic->canRead()) {
std::string value = pRemoteCharacteristic->readValue();
Serial.print("The characteristic value was: ");
Serial.println(value.c_str());
}
if(pRemoteCharacteristic->canNotify())
pRemoteCharacteristic->registerForNotify(notifyCallback);
connected = true;
return true;
}
/**
* Scan for BLE servers and find the first one that advertises the service we are looking for.
*/
class MyAdvertisedDeviceCallbacks: public BLEAdvertisedDeviceCallbacks {
/**
* Called for each advertising BLE server.
*/
void onResult(BLEAdvertisedDevice advertisedDevice) {
Serial.print("BLE Advertised Device found: ");
Serial.println(advertisedDevice.toString().c_str());
// We have found a device, let us now see if it contains the service we are looking for.
if (advertisedDevice.haveServiceUUID() && advertisedDevice.isAdvertisingService(serviceUUID)) {
BLEDevice::getScan()->stop();
myDevice = new BLEAdvertisedDevice(advertisedDevice);
doConnect = true;
doScan = true;
} // Found our server
} // onResult
}; // MyAdvertisedDeviceCallbacks
getDisplay.ino
// Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(2);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
display.setTextSize(2);
display.setCursor(0,100);
display.println( sver );
display.setCursor(0,125);
display.println( dateRTC );
display.setCursor(0,150);
display.println( timeRTC );
// Refresh
display.refresh();
delay( 5000 );
}
// Display Environmental
void isDisplayEnvironmental(){
// Text Display Environmental
// Clear Display
display.clearDisplay();
display.setRotation(2);
display.setTextSize(2);
display.setTextColor(BLACK);
// Temperature Celsius
display.setCursor(0,5);
display.print( "T: " );
display.print( TEMValue );
display.println( "C" );
// Humidity
display.setCursor(0,25);
display.print( "H: " );
display.print( HUMValue );
display.println( "%" );
// Pressure
display.setCursor(0,45);
display.print( "B: " );
display.print( BARValue );
display.println( "" );
// Altitude Meters
display.setCursor(0,65);
display.print( "A: " );
display.print( ALTValue );
display.println( "M" );
// eCO2 Concentration
display.setCursor(0,85);
display.print( "C: " );
display.print( ECOValue );
display.println( "ppm" );
// tVOC Concentration
display.setCursor(0,105);
display.print( "V: " );
display.print( VOCValue );
display.println( "ppb" );
// Date
display.setCursor(0,125);
display.println( dateRTC );
// Time
display.setCursor(0,145);
display.println( timeRTC );
// Refresh
display.refresh();
delay( 100 );
}
getRTC.ino
// Date & Time
// PCF8523 Precision RTC
void setupRTC() {
// Date & Time
// pcf8523 Precision RTC
if (! rtc.begin()) {
while (1);
}
if (! rtc.initialized()) {
// Following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
//rtc.adjust(DateTime(2023, 7, 24, 11, 0, 0));
}
}
// Date and Time RTC
void isRTC () {
// Date and Time
dateRTC = "";
timeRTC = "";
DateTime now = rtc.now();
// Date
dateRTC = now.year(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.month(), DEC;
dateRTC = dateRTC + "/";
dateRTC = dateRTC + now.day(), DEC;
// Time
timeRTC = now.hour(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.minute(), DEC;
timeRTC = timeRTC + ":";
timeRTC = timeRTC + now.second(), DEC;
}
getSD.ino
// microSD Card
// microSD Setup
void setupSD() {
// microSD Card
pinMode( chipSelect , OUTPUT );
if(!SD.begin( chipSelect )){
;
return;
}
uint8_t cardType = SD.cardType();
if(cardType == CARD_NONE){
;
return;
}
//Serial.print("SD Card Type: ");
if(cardType == CARD_MMC){
;
} else if(cardType == CARD_SD){
;
} else if(cardType == CARD_SDHC){
;
} else {
;
}
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
}
// microSD Card
void isSD() {
zzzzzz = "";
// BLE|Version|Date|Time|Temperature Celsius|Humidity|Barometric Pressure
//|Altitude Meters|eCO2 Concentration|tVOC Concentration|*
zzzzzz = "BLE|" + sver + "|" + dateRTC + "|" + timeRTC + "|" + TEMValue
+ "|" + HUMValue + "|" + BARValue + "|" + ALTValue + "|" + ECOValue
+ "|" + VOCValue + "|*\r";
char msg[zzzzzz.length() + 1];
zzzzzz.toCharArray(msg, zzzzzz.length() + 1);
appendFile(SD, "/espdata.txt", msg );
}
// List Dir
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
dirname;
File root = fs.open(dirname);
if(!root){
return;
}
if(!root.isDirectory()){
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
file.name();
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
file.name();
file.size();
}
file = root.openNextFile();
}
}
// Write File
void writeFile(fs::FS &fs, const char * path, const char * message){
path;
File file = fs.open(path, FILE_WRITE);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
// Append File
void appendFile(fs::FS &fs, const char * path, const char * message){
path;
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
;
} else {
;
}
file.close();
}
setup.ino
// Setup
void setup()
{
// Serial
Serial.begin(115200);
Serial.println("Starting Arduino BLE Client application...");
// Initialize digital pin iLED as an output
pinMode(iLED, OUTPUT);
// Turn the LED on HIGH
digitalWrite(iLED, HIGH);
// SHARP Display start & clear the display
display.begin();
display.clearDisplay();
// Date & Time RTC
// PCF8523 Precision RTC
setupRTC();
// Date & Time
isRTC();
// Display UID
isDisplayUID();
// microSD Card
setupSD();
// Bluetooth BLE
BLEDevice::init("");
// Give display time to power on
delay(100);
BLEScan* pBLEScan = BLEDevice::getScan();
pBLEScan->setAdvertisedDeviceCallbacks(new MyAdvertisedDeviceCallbacks());
pBLEScan->setInterval(1349);
pBLEScan->setWindow(449);
pBLEScan->setActiveScan(true);
pBLEScan->start(5, false);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #26 – Radio Frequency – Bluetooth Server and Client – Mk26
——
#DonLucElectronics #DonLuc #RadioFrequency #Bluetooth #Display #SparkFun #BME280 #CCS811 #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——-
Bluetooth Server and Client
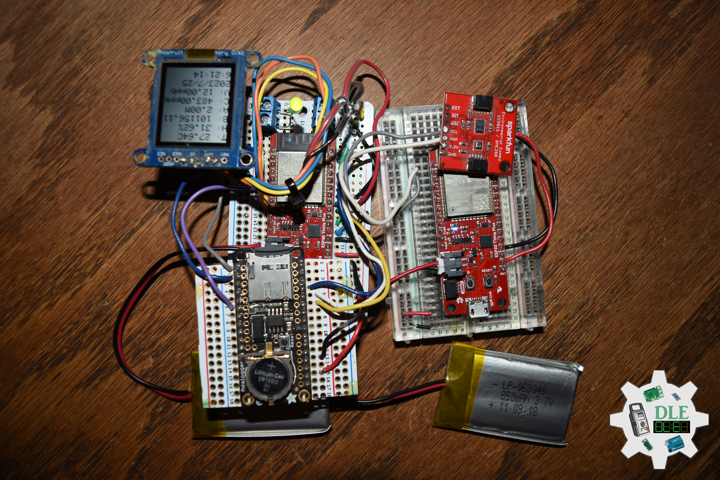
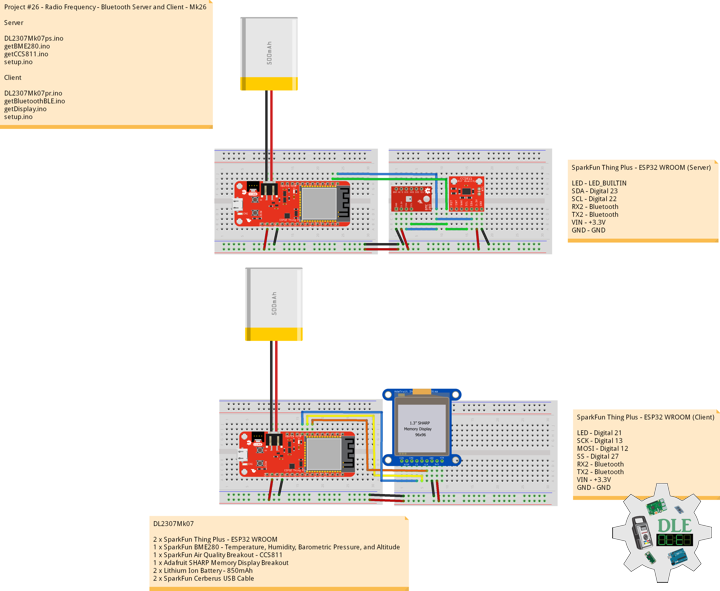
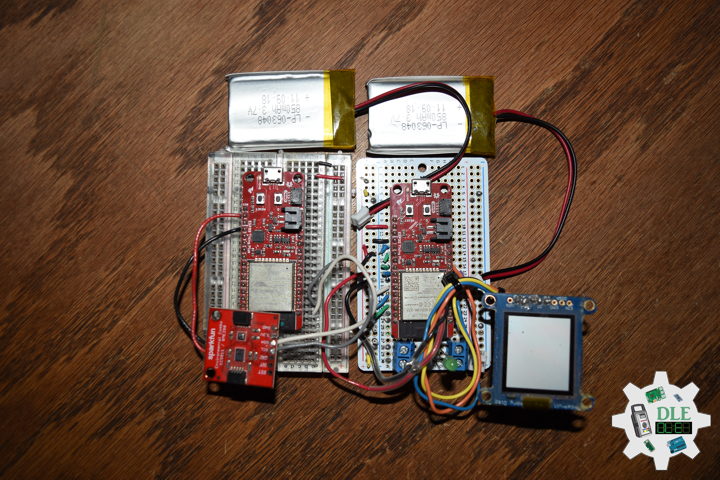
Connect the SparkFun BME280 and CCS811 this is the “Server” board. Upload SparkFun Thing Plus the Server code to the board using the USB cable. When uploading is complete, disconnect this board from the computer. Now, connect the Lithium Ion battery to the “Server”. Next, connect the second SparkFun Thing Plus to your computer and upload the Client code to the board. We have two Arduino sketches to upload to the SparkFun Thing Plus boards. Upload the first sketch to the Server SparkFun Thing Plus and the second sketch to the Client SparkFun Thing Plus.
DL2307Mk07
2 x SparkFun Thing Plus – ESP32 WROOM
1 x SparkFun BME280 – Temperature, Humidity, Barometric Pressure, and Altitude
1 x SparkFun Air Quality Breakout – CCS811
1 x Adafruit SHARP Memory Display Breakout
2 x Lithium Ion Battery – 850mAh
2 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM (Server)
LED – LED_BUILTIN
SDA – Digital 23
SCL – Digital 22
RX2 – Bluetooth
TX2 – Bluetooth
VIN – +3.3V
GND – GND
——
DL2307Mk07ps.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Bluetooth Server and Client - Mk26
26-26
DL2307Mk07ps.ino
2 x SparkFun Thing Plus - ESP32 WROOM
1 x SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
1 x SparkFun Air Quality Breakout - CCS811
1 x Adafruit SHARP Memory Display Breakout
2 x Lithium Ion Battery - 850mAh
2 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// BLE Device
#include <BLEDevice.h>
// BLE Utils
#include <BLEUtils.h>
// BLE Serve
#include <BLEServer.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
#include <SparkFunBME280.h>
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// See the following for generating UUIDs:
// https://www.uuidgenerator.net/
#define SERVICE_UUID "7c394dc4-49a8-4c22-8a5b-b1612d8c13c1"
#define CHARACTERISTIC_UUID "a4c4cec2-f394-4f7a-b9de-89047feca74b"
#define CHARACTERISTIC_TEM_UUID "74bd92c6-89d0-4387-823e-97e7e0fb7a2b"
#define CHARACTERISTIC_HUM_UUID "1b63f246-b97f-4d2e-b8eb-f69e20a23a34"
#define CHARACTERISTIC_BAR_UUID "43788175-37a7-4280-93c6-c690324d088e"
#define CHARACTERISTIC_ALT_UUID "609deed9-a72d-45c3-aaba-14a73b0d8fda"
#define CHARACTERISTIC_ECO_UUID "ab17aace-c0b9-4bd3-bb93-7715d9afaeea"
#define CHARACTERISTIC_VOC_UUID "6a8bf86a-9d40-457c-9f7f-f13a3d6803f1"
// Makes the chracteristic globlal
static BLECharacteristic *pCharacteristicTEM;
static BLECharacteristic *pCharacteristicHUM;
static BLECharacteristic *pCharacteristicBAR;
static BLECharacteristic *pCharacteristicALT;
static BLECharacteristic *pCharacteristicECO;
static BLECharacteristic *pCharacteristicVOC;
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
BME280 myBME280;
float BMEtempC = 0;
float BMEhumid = 0;
float BMEpressure = 0;
float BMEaltitudeM = 0;
String FullString = "";
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
float CCS811CO2 = 0;
float CCS811TVOC = 0;
String FullStringA = "";
// Software Version Information
String sver = "26-26";
void loop() {
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Delay 1 sec
delay(1000);
}
getBME280.ino
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
// isBME280 - Temperature, Humidity, Barometric Pressure, and Altitude
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// setValue takes uint8_t, uint16_t, uint32_t, int, float, double and string
pCharacteristicTEM->setValue(BMEtempC);
pCharacteristicHUM->setValue(BMEhumid);
pCharacteristicBAR->setValue(BMEpressure);
pCharacteristicALT->setValue(BMEaltitudeM);
// FullString
FullString = "Temperature = " + String(BMEtempC,2) + " Humidity = "
+ String(BMEhumid,2) + " Barometric = " + String(BMEpressure,2)
+ " Altitude Meters = " + String(BMEaltitudeM,2) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
// setValue takes uint8_t, uint16_t, uint32_t, int, float, double and string
pCharacteristicECO->setValue(CCS811CO2);
pCharacteristicVOC->setValue(CCS811TVOC);
// FullStringA
FullStringA = "TVOCs = " + String(CCS811TVOC,2) + " eCO2 = "
+ String(CCS811CO2,2) + "\r\n";
// FullStringA Bluetooth Serial + Serial
for(int i = 0; i < FullStringA.length(); i++)
{
// Serial
Serial.write(FullStringA.c_str()[i]);
}
}
setup.ino
// Setup
void setup()
{
// Serial Begin
Serial.begin(115200);
Serial.println("Starting BLE work!");
// Give display time to power on
delay(100);
// Wire - Inialize I2C Hardware
Wire.begin();
// Give display time to power on
delay(100);
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// Initialize digital pin LED_BUILTIN as an output
pinMode(LED_BUILTIN, OUTPUT);
// Turn the LED on HIGH
digitalWrite(LED_BUILTIN, HIGH);
// BLE Device Init
BLEDevice::init("Don Luc Electronics Server");
BLEServer *pServer = BLEDevice::createServer();
BLEService *pService = pServer->createService(SERVICE_UUID);
BLECharacteristic *pCharacteristic = pService->createCharacteristic(
CHARACTERISTIC_UUID,
BLECharacteristic::PROPERTY_READ |
BLECharacteristic::PROPERTY_WRITE
);
pCharacteristicTEM = pService->createCharacteristic(
CHARACTERISTIC_TEM_UUID,
BLECharacteristic::PROPERTY_READ |
BLECharacteristic::PROPERTY_WRITE
);
pCharacteristicHUM = pService->createCharacteristic(
CHARACTERISTIC_HUM_UUID,
BLECharacteristic::PROPERTY_READ |
BLECharacteristic::PROPERTY_WRITE
);
pCharacteristicBAR = pService->createCharacteristic(
CHARACTERISTIC_BAR_UUID,
BLECharacteristic::PROPERTY_READ |
BLECharacteristic::PROPERTY_WRITE
);
pCharacteristicALT = pService->createCharacteristic(
CHARACTERISTIC_ALT_UUID,
BLECharacteristic::PROPERTY_READ |
BLECharacteristic::PROPERTY_WRITE
);
pCharacteristicVOC = pService->createCharacteristic(
CHARACTERISTIC_VOC_UUID,
BLECharacteristic::PROPERTY_READ |
BLECharacteristic::PROPERTY_WRITE
);
pCharacteristicECO = pService->createCharacteristic(
CHARACTERISTIC_ECO_UUID,
BLECharacteristic::PROPERTY_READ |
BLECharacteristic::PROPERTY_WRITE
);
pCharacteristic->setValue("Luc Paquin");
pService->start();
// This still is working for backward compatibility
// BLEAdvertising *pAdvertising = pServer->getAdvertising();
// BLE Advertising
BLEAdvertising *pAdvertising = BLEDevice::getAdvertising();
pAdvertising->addServiceUUID(SERVICE_UUID);
pAdvertising->setScanResponse(true);
// Functions that help with iPhone connections issue
pAdvertising->setMinPreferred(0x06);
pAdvertising->setMinPreferred(0x12);
BLEDevice::startAdvertising();
}
——
SparkFun Thing Plus – ESP32 WROOM (Client)
LED – Digital 21
SCK – Digital 13
MOSI – Digital 12
SS – Digital 27
RX2 – Bluetooth
TX2 – Bluetooth
VIN – +3.3V
GND – GND
——
DL2307Mk07pr.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Bluetooth Server and Client - Mk26
26-26
DL2307Mk07pr.ino
2 x SparkFun Thing Plus - ESP32 WROOM
1 x SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
1 x SparkFun Air Quality Breakout - CCS811
1 x Adafruit SHARP Memory Display Breakout
2 x Lithium Ion Battery - 850mAh
2 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Bluetooth BLE Device
#include "BLEDevice.h"
// SHARP Memory Display
#include <Adafruit_SharpMem.h>
// Adafruit GFX Library
#include <Adafruit_GFX.h>
// SHARP Memory Display
// any pins can be used
#define SHARP_SCK 13
#define SHARP_MOSI 12
#define SHARP_SS 27
// Set the size of the display here, e.g. 144x168!
Adafruit_SharpMem display(SHARP_SCK, SHARP_MOSI, SHARP_SS, 144, 168);
// The currently-available SHARP Memory Display (144x168 pixels)
// requires > 4K of microcontroller RAM; it WILL NOT WORK on Arduino Uno
// or other <4K "classic" devices.
#define BLACK 0
#define WHITE 1
// 1/2 of lesser of display width or height
int minorHalfSize;
// The remote service we wish to connect to.
static BLEUUID serviceUUID("7c394dc4-49a8-4c22-8a5b-b1612d8c13c1");
// The characteristic of the remote service we are interested in.
static BLEUUID charUUID("a4c4cec2-f394-4f7a-b9de-89047feca74b");
// Use the same UUID as on the server
static BLEUUID charTEMUUID("74bd92c6-89d0-4387-823e-97e7e0fb7a2b");
static BLEUUID charHUMUUID("1b63f246-b97f-4d2e-b8eb-f69e20a23a34");
static BLEUUID charBARUUID("43788175-37a7-4280-93c6-c690324d088e");
static BLEUUID charALTUUID("609deed9-a72d-45c3-aaba-14a73b0d8fda");
static BLEUUID charECOUUID("ab17aace-c0b9-4bd3-bb93-7715d9afaeea");
static BLEUUID charVOCUUID("6a8bf86a-9d40-457c-9f7f-f13a3d6803f1");
static boolean doConnect = false;
static boolean connected = false;
static boolean doScan = false;
static BLERemoteCharacteristic* pRemoteCharacteristic;
static BLERemoteCharacteristic* pRemoteCharacteristicTEM;
static BLERemoteCharacteristic* pRemoteCharacteristicHUM;
static BLERemoteCharacteristic* pRemoteCharacteristicBAR;
static BLERemoteCharacteristic* pRemoteCharacteristicALT;
static BLERemoteCharacteristic* pRemoteCharacteristicECO;
static BLERemoteCharacteristic* pRemoteCharacteristicVOC;
static BLEAdvertisedDevice* myDevice;
float TEMValue;
float HUMValue;
float BARValue;
float ALTValue;
float ECOValue;
float VOCValue;
int iLED = 21;
// Software Version Information
String sver = "26-26";
void loop() {
isBluetoothBLE();
isDisplayEnvironmental();
}
getBluetoothBLE.ino
// Bluetooth BLE
void isBluetoothBLE(){
// If the flag "doConnect" is true then we have scanned for
// and found the desired
// BLE Server with which we wish to connect. Now we connect to it.
// Once we are connected we set the connected flag to be true.
if (doConnect == true) {
if (connectToServer()) {
Serial.println("We are now connected to the BLE Server.");
} else {
Serial.println("We have failed to connect to the server; there is nothin more we will do.");
}
doConnect = false;
}
// If we are connected to a peer BLE Server, update the characteristic each time we are reached
// with the current time since boot.
if (connected) {
String newValue = "Time since boot: " + String(millis()/1000);
//Serial.println("Setting new characteristic value to \"" + newValue + "\"");
// Set the characteristic's value to be the array of bytes that is actually a string.
// pRemoteCharacteristic->writeValue(newValue.c_str(), newValue.length());//***********JKO
}else if(doScan){
BLEDevice::getScan()->start(0); // this is just example to start scan after disconnect, most likely there is better way to do it in arduino
}
// read the Characteristics and store them in a variable
// This also makes the print command do float handling
TEMValue = pRemoteCharacteristicTEM->readFloat();
HUMValue = pRemoteCharacteristicHUM->readFloat();
BARValue = pRemoteCharacteristicBAR->readFloat();
ALTValue = pRemoteCharacteristicALT->readFloat();
ECOValue = pRemoteCharacteristicECO->readFloat();
VOCValue = pRemoteCharacteristicVOC->readFloat();
}
// Notify Callback
static void notifyCallback(
BLERemoteCharacteristic* pBLERemoteCharacteristic,
uint8_t* pData,
size_t length,
bool isNotify) {
Serial.print("Notify callback for characteristic ");
Serial.print(pBLERemoteCharacteristic->getUUID().toString().c_str());
Serial.print(" of data length ");
Serial.println(length);
Serial.print("data: ");
Serial.println((char*)pData);
}
// My Client Callback
class MyClientCallback : public BLEClientCallbacks {
void onConnect(BLEClient* pclient) {
}
void onDisconnect(BLEClient* pclient) {
connected = false;
Serial.println("onDisconnect");
}
};
// Connect To Server
bool connectToServer() {
Serial.print("Forming a connection to ");
Serial.println(myDevice->getAddress().toString().c_str());
BLEClient* pClient = BLEDevice::createClient();
Serial.println(" - Created client");
pClient->setClientCallbacks(new MyClientCallback());
// Connect to the remove BLE Server.
// if you pass BLEAdvertisedDevice instead of address,
//it will be recognized type of peer device address (public or private)
pClient->connect(myDevice);
Serial.println(" - Connected to server");
//set client to request maximum MTU from server (default is 23 otherwise)
pClient->setMTU(517);
// Obtain a reference to the service we are after in the remote BLE server.
BLERemoteService* pRemoteService = pClient->getService(serviceUUID);
if (pRemoteService == nullptr) {
Serial.print("Failed to find our service UUID: ");
Serial.println(serviceUUID.toString().c_str());
pClient->disconnect();
return false;
}
Serial.println(" - Found our service");
// Obtain a reference to the characteristic in the service of the remote BLE server.
pRemoteCharacteristic = pRemoteService->getCharacteristic(charUUID);
if (pRemoteCharacteristic == nullptr) {
Serial.print("Failed to find our characteristic UUID: ");
Serial.println(charUUID.toString().c_str());
pClient->disconnect();
return false;
}
Serial.println(" - Found our characteristic");
// Temperature Obtain a reference to the characteristic in the service
// of the remote BLE server.
pRemoteCharacteristicTEM = pRemoteService->getCharacteristic(charTEMUUID);
if (pRemoteCharacteristicTEM == nullptr) {
Serial.print("Failed to find our characteristic UUID Temperature: ");
Serial.println(charTEMUUID.toString().c_str());
pClient->disconnect();
return false;
}
// Humidity Obtain a reference to the characteristic in the service
// of the remote BLE server.
pRemoteCharacteristicHUM = pRemoteService->getCharacteristic(charHUMUUID);
if (pRemoteCharacteristicHUM == nullptr) {
Serial.print("Failed to find our characteristic UUID Temperature: ");
Serial.println(charHUMUUID.toString().c_str());
pClient->disconnect();
return false;
}
Serial.println(" - Found our characteristic");
// Barometric Obtain a reference to the characteristic in the service
// of the remote BLE server.
pRemoteCharacteristicBAR = pRemoteService->getCharacteristic(charBARUUID);
if (pRemoteCharacteristicBAR == nullptr) {
Serial.print("Failed to find our characteristic UUID Barometric: ");
Serial.println(charBARUUID.toString().c_str());
pClient->disconnect();
return false;
}
Serial.println(" - Found our characteristic");
// Altitude Obtain a reference to the characteristic in the service
// of the remote BLE server.
pRemoteCharacteristicALT = pRemoteService->getCharacteristic(charALTUUID);
if (pRemoteCharacteristicALT == nullptr) {
Serial.print("Failed to find our characteristic UUID Altitude: ");
Serial.println(charALTUUID.toString().c_str());
pClient->disconnect();
return false;
}
// eCO2 Concentration Obtain a reference to the characteristic in the service
// of the remote BLE server.
pRemoteCharacteristicECO = pRemoteService->getCharacteristic(charECOUUID);
if (pRemoteCharacteristicECO == nullptr) {
Serial.print("Failed to find our characteristic UUID eCO2 Concentration: ");
Serial.println(charECOUUID.toString().c_str());
pClient->disconnect();
return false;
}
Serial.println(" - Found our characteristic");
// tVOC Concentration Obtain a reference to the characteristic in the service
// of the remote BLE server.
pRemoteCharacteristicVOC = pRemoteService->getCharacteristic(charVOCUUID);
if (pRemoteCharacteristicVOC == nullptr) {
Serial.print("Failed to find our characteristic UUID tVOC Concentration: ");
Serial.println(charVOCUUID.toString().c_str());
pClient->disconnect();
return false;
}
Serial.println(" - Found our characteristic");
// Read the value of the characteristic.
if(pRemoteCharacteristic->canRead()) {
std::string value = pRemoteCharacteristic->readValue();
Serial.print("The characteristic value was: ");
Serial.println(value.c_str());
}
if(pRemoteCharacteristic->canNotify())
pRemoteCharacteristic->registerForNotify(notifyCallback);
connected = true;
return true;
}
/**
* Scan for BLE servers and find the first one that advertises the service we are looking for.
*/
class MyAdvertisedDeviceCallbacks: public BLEAdvertisedDeviceCallbacks {
/**
* Called for each advertising BLE server.
*/
void onResult(BLEAdvertisedDevice advertisedDevice) {
Serial.print("BLE Advertised Device found: ");
Serial.println(advertisedDevice.toString().c_str());
// We have found a device, let us now see if it contains the service we are looking for.
if (advertisedDevice.haveServiceUUID() && advertisedDevice.isAdvertisingService(serviceUUID)) {
BLEDevice::getScan()->stop();
myDevice = new BLEAdvertisedDevice(advertisedDevice);
doConnect = true;
doScan = true;
} // Found our server
} // onResult
}; // MyAdvertisedDeviceCallbacks
getDisplay.ino
// Display
// SHARP Memory Display - UID
void isDisplayUID() {
// Text Display
// Clear Display
display.clearDisplay();
display.setRotation(2);
display.setTextSize(3);
display.setTextColor(BLACK);
// Don Luc Electronics
display.setCursor(0,10);
display.println( "Don Luc" );
display.setTextSize(2);
display.setCursor(0,40);
display.println( "Electronics" );
// Version
display.setTextSize(3);
display.setCursor(0,70);
display.println( "Version" );
display.setTextSize(2);
display.setCursor(0,100);
display.println( sver );
// Refresh
display.refresh();
delay( 5000 );
}
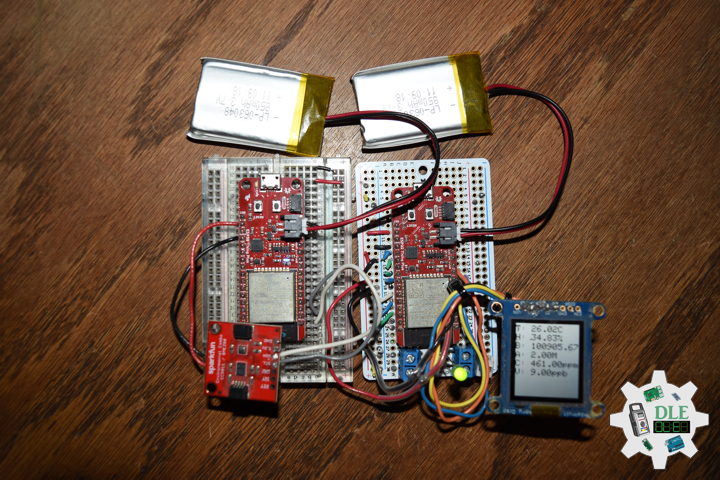
// Display Environmental
void isDisplayEnvironmental(){
// Text Display Environmental
// Clear Display
display.clearDisplay();
display.setRotation(2);
display.setTextSize(2);
display.setTextColor(BLACK);
// Temperature Celsius
display.setCursor(0,5);
display.print( "T: " );
display.print( TEMValue );
display.println( "C" );
// Humidity
display.setCursor(0,25);
display.print( "H: " );
display.print( HUMValue );
display.println( "%" );
// Pressure
display.setCursor(0,45);
display.print( "B: " );
display.print( BARValue );
display.println( "" );
// Altitude Meters
display.setCursor(0,65);
display.print( "A: " );
display.print( ALTValue );
display.println( "M" );
// eCO2 Concentration
display.setCursor(0,85);
display.print( "C: " );
display.print( ECOValue );
display.println( "ppm" );
// tVOC Concentration
display.setCursor(0,105);
display.print( "V: " );
display.print( VOCValue );
display.println( "ppb" );
// Refresh
display.refresh();
delay( 100 );
}
setup.ino
// Setup
void setup()
{
// Serial
Serial.begin(115200);
Serial.println("Starting Arduino BLE Client application...");
// Initialize digital pin iLED as an output
pinMode(iLED, OUTPUT);
// Turn the LED on HIGH
digitalWrite(iLED, HIGH);
// SHARP Display start & clear the display
display.begin();
display.clearDisplay();
// Display UID
isDisplayUID();
// Bluetooth BLE
BLEDevice::init("");
// Give display time to power on
delay(100);
BLEScan* pBLEScan = BLEDevice::getScan();
pBLEScan->setAdvertisedDeviceCallbacks(new MyAdvertisedDeviceCallbacks());
pBLEScan->setInterval(1349);
pBLEScan->setWindow(449);
pBLEScan->setActiveScan(true);
pBLEScan->start(5, false);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
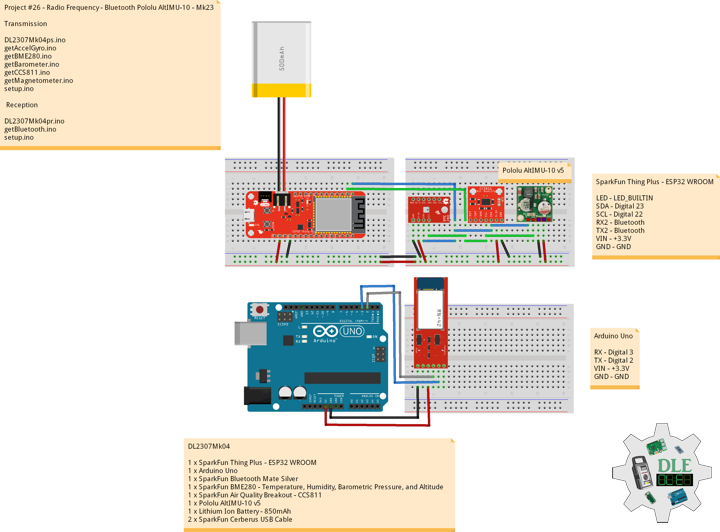
Project #26 – Radio Frequency – Bluetooth Pololu AltIMU-10 – Mk23
——
#DonLucElectronics #DonLuc #RadioFrequency #Bluetooth #SparkFun #BME280 #CCS811 #IMU #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
——
——
——
AltIMU-10 v5 Gyro, Accelerometer, Compass, and Altimeter
The Pololu AltIMU-10 v5 is an inertial measurement unit (IMU) and altimeter that features the same LSM6DS33 gyro and accelerometer and LIS3MDL magnetometer as the MinIMU-9 v5, and adds an LPS25H digital barometer. An I²C interface accesses ten independent pressure, rotation, acceleration, and magnetic measurements that can be used to calculate the sensor’s altitude and absolute orientation. The Pololu AltIMU-10 v5 is a compact board that combines ST’s LSM6DS33 3-axis gyroscope and 3-axis accelerometer, LIS3MDL 3-axis magnetometer, and LPS25H digital barometer to form an inertial measurement unit (IMU) and altimeter.
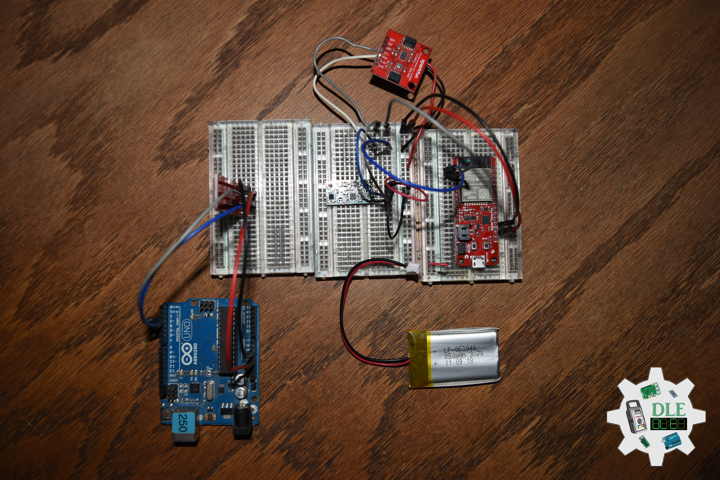
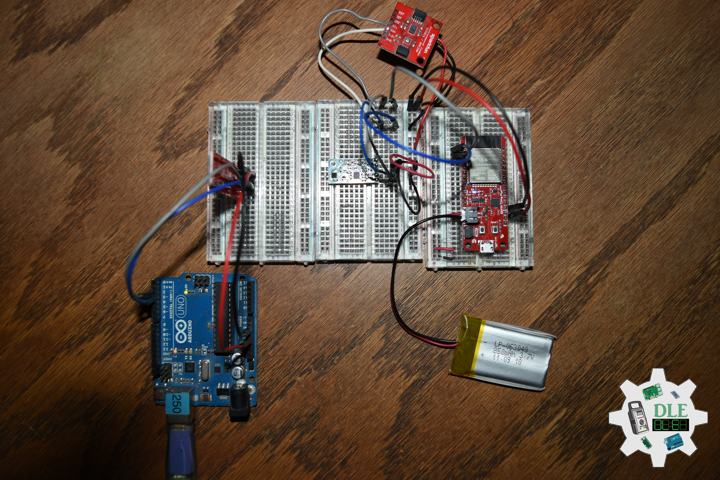
DL2307Mk04
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Arduino Uno
1 x SparkFun Bluetooth Mate Silver
1 x SparkFun BME280 – Temperature, Humidity, Barometric Pressure, and Altitude
1 x SparkFun Air Quality Breakout – CCS811
1 x Pololu AltIMU-10 v5
1 x Lithium Ion Battery – 850mAh
2 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
LED – LED_BUILTIN
SDA – Digital 23
SCL – Digital 22
RX2 – Bluetooth
TX2 – Bluetooth
VIN – +3.3V
GND – GND
——
DL2307Mk04ps.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Bluetooth Pololu AltIMU-10 - Mk23
26-23
DL2307Mk04pr.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x Arduino Uno
1 x SparkFun Bluetooth Mate Silver
1 x SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
1 x SparkFun Air Quality Breakout - CCS811
1 x Pololu AltIMU-10 v5
1 x Lithium Ion Battery - 85mAh
2 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Bluetooth Serial
#include "BluetoothSerial.h"
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to and enable it
#endif
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
#include <SparkFunBME280.h>
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// Includes and variables for IMU integration
// STMicroelectronics LSM6DS33 gyroscope and accelerometer
#include <LSM6.h>
// STMicroelectronics LIS3MDL magnetometer
#include <LIS3MDL.h>
// STMicroelectronics LPS25H digital barometer
#include <LPS.h>
// Bluetooth Serial
BluetoothSerial SerialBT;
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
BME280 myBME280;
float BMEtempC = 0;
float BMEhumid = 0;
float BMEpressure = 0;
float BMEaltitudeM = 0;
String FullString = "";
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
float CCS811CO2 = 0;
float CCS811TVOC = 0;
String FullStringA = "";
// 9DoF IMU
// STMicroelectronics LSM6DS33 gyroscope and accelerometer
LSM6 imu;
// Accelerometer and Gyroscopes
// Accelerometer
int imuAX;
int imuAY;
int imuAZ;
String FullStringB = "";
// Gyroscopes
int imuGX;
int imuGY;
int imuGZ;
String FullStringC = "";
// STMicroelectronics LIS3MDL magnetometer
LIS3MDL mag;
// Magnetometer
int magX;
int magY;
int magZ;
String FullStringD = "";
// STMicroelectronics LPS25H digital barometer
LPS ps;
// Digital Barometer
float pressure;
float altitude;
float temperature;
String FullStringF = "";
// Software Version Information
String sver = "26-23";
void loop() {
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Accelerometer and Gyroscopes
isIMU();
// Magnetometer
isMag();
// Barometer
isBarometer();
// Delay 1 sec
delay(1000);
}
getAccelGyro.ino
// Accelerometer and Gyroscopes
// Setup IMU
void setupIMU() {
// Setup IMU
imu.init();
// Default
imu.enableDefault();
}
// Accelerometer and Gyroscopes
void isIMU() {
// Accelerometer and Gyroscopes
imu.read();
// Accelerometer x, y, z
imuAX = imu.a.x;
imuAY = imu.a.y;
imuAZ = imu.a.z;
// Gyroscopes x, y, z
imuGX = imu.g.x;
imuGY = imu.g.y;
imuGZ = imu.g.z;
// FullString B
FullStringB = "Accelerometer X = " + String(imuAX) + " Accelerometer Y = "
+ String(imuAY) + " Accelerometer Z = " + String(imuAZ)
+ "\r\n";
// FullStringB Bluetooth Serial + Serial
for(int i = 0; i < FullStringB.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringB.c_str()[i]);
// Serial
Serial.write(FullStringB.c_str()[i]);
}
// FullString C
FullStringC = "Gyroscopes X = " + String(imuGX) + " Gyroscopes Y = "
+ String(imuGY) + " Gyroscopes Z = " + String(imuGZ)
+ "\r\n";
// FullStringC Bluetooth Serial + Serial
for(int i = 0; i < FullStringC.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringC.c_str()[i]);
// Serial
Serial.write(FullStringC.c_str()[i]);
}
}
getBME280.ino
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
// isBME280 - Temperature, Humidity, Barometric Pressure, and Altitude
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// FullString
FullString = "Temperature = " + String(BMEtempC,2) + " Humidity = "
+ String(BMEhumid,2) + " Barometric = " + String(BMEpressure,2)
+ " Altitude Meters = " + String(BMEaltitudeM,2) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getBarometer.ino
// STMicroelectronics LPS25H digital barometer
// Setup Barometer
void isSetupBarometer(){
// Setup Barometer
ps.init();
// Default
ps.enableDefault();
}
// Barometer
void isBarometer(){
// Barometer
pressure = ps.readPressureMillibars();
// Altitude Meters
altitude = ps.pressureToAltitudeMeters(pressure);
// Temperature Celsius
temperature = ps.readTemperatureC();
// FullStringF
FullStringF = "Barometer = " + String(pressure,2) + " Altitude Meters = "
+ String(altitude,2) + " Temperature Celsius = "
+ String(temperature,2) + "\r\n";
// FullStringF Bluetooth Serial + Serial
for(int i = 0; i < FullStringF.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringF.c_str()[i]);
// Serial
Serial.write(FullStringF.c_str()[i]);
}
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
// FullStringA
FullStringA = "TVOCs = " + String(CCS811TVOC,2) + " eCO2 = "
+ String(CCS811CO2,2) + "\r\n";
// FullStringA Bluetooth Serial + Serial
for(int i = 0; i < FullStringA.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringA.c_str()[i]);
// Serial
Serial.write(FullStringA.c_str()[i]);
}
}
getMagnetometer.ino
// Magnetometer
// Setup Magnetometer
void setupMag() {
// Setup Magnetometer
mag.init();
// Default
mag.enableDefault();
}
// Magnetometer
void isMag() {
// Magnetometer
mag.read();
// Magnetometer x, y, z
magX = mag.m.x;
magY = mag.m.y;
magZ = mag.m.z;
// FullString D
FullStringD = "Magnetometer X = " + String(magX) + " Magnetometer Y = "
+ String(magY) + " Magnetometer Z = " + String(magZ)
+ "\r\n";
// FullStringD Bluetooth Serial + Serial
for(int i = 0; i < FullStringD.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringD.c_str()[i]);
// Serial
Serial.write(FullStringD.c_str()[i]);
}
}
setup.ino
// Setup
void setup()
{
// Serial Begin
Serial.begin(9600);
Serial.println("Starting BLE work!");
// Bluetooth Serial
SerialBT.begin("Don Luc Electronics");
Serial.println("Bluetooth Started! Ready to pair...");
// Give display time to power on
delay(100);
// Wire - Inialize I2C Hardware
Wire.begin();
// Give display time to power on
delay(100);
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// Setup IMU
setupIMU();
// Setup Magnetometer
setupMag();
// Setup Barometer
isSetupBarometer();
// Initialize digital pin LED_BUILTIN as an output
pinMode(LED_BUILTIN, OUTPUT);
// Turn the LED on HIGH
digitalWrite(LED_BUILTIN, HIGH);
}
——
Arduino Uno
RX – Digital 3
TX – Digital 2
VIN – +3.3V
GND – GND
——
DL2307Mk04pr.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Bluetooth Pololu AltIMU-10 - Mk23
26-23
DL2307Mk04pr.ino
1 x Arduino Uno
1 x SparkFun RedBoard Qwiic
1 x SparkFun Bluetooth Mate Silver
1 x SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
1 x SparkFun Air Quality Breakout - CCS811
1 x Pololu AltIMU-10 v5
1 x Lithium Ion Battery - 85mAh
2 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Software Serial
#include <SoftwareSerial.h>
// Software Serial
// TX-O pin of bluetooth mate, Arduino D2
int bluetoothTx = 2;
// RX-I pin of bluetooth mate, Arduino D3
int bluetoothRx = 3;
// Bluetooth
SoftwareSerial bluetooth(bluetoothTx, bluetoothRx);
// BTA
//String BTA = "0006664FDC9E";
// Software Version Information
String sver = "26-23";
void loop() {
// isBluetooth
isBluetooth();
}
getBluetooth.ino
// Bluetooth
// Setup Bluetooth
void isSetupBluetooth(){
// Setup Bluetooth
// Begin the serial monitor at 9600bps
Serial.begin(9600);
// Bluetooth
// The Bluetooth Mate defaults to 115200bps
bluetooth.begin(115200);
// Print three times individually
bluetooth.print("$");
bluetooth.print("$");
bluetooth.print("$");
// Enter command mode
// Short delay, wait for the Mate to send back CMD
delay(100);
// Temporarily Change the baudrate to 9600, no parity
bluetooth.println("U,9600,N");
// 115200 can be too fast at times for NewSoftSerial to relay the data reliably
// Start bluetooth serial at 9600
bluetooth.begin(9600);
}
// isBluetooth
void isBluetooth() {
// If the bluetooth sent any characters
if(bluetooth.available())
{
// Send any characters the bluetooth prints to the serial monitor
Serial.print((char)bluetooth.read());
}
// If stuff was typed in the serial monitor
if(Serial.available())
{
// Send any characters the Serial monitor prints to the bluetooth
bluetooth.print((char)Serial.read());
}
}
setup.ino
// Setup
void setup()
{
// Setup Bluetooth
isSetupBluetooth();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #26 – Radio Frequency – Bluetooth CCS811 – Mk22
——
#DonLucElectronics #DonLuc #RadioFrequency #Bluetooth #SparkFun #BME280 #CCS811 #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
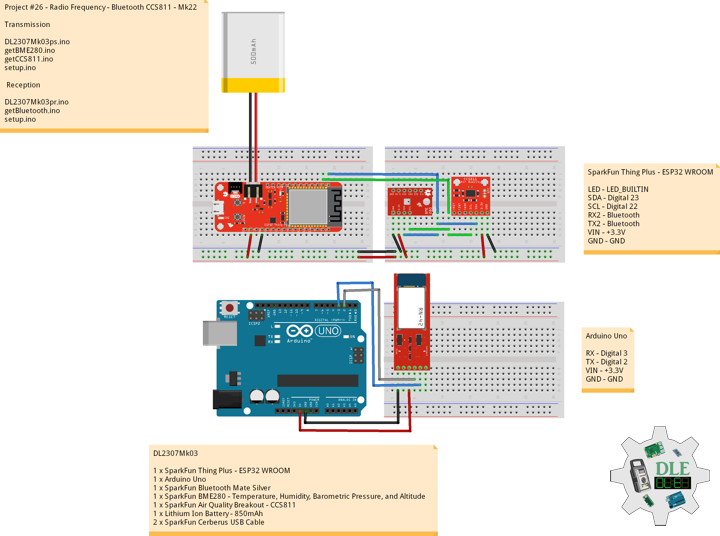
——
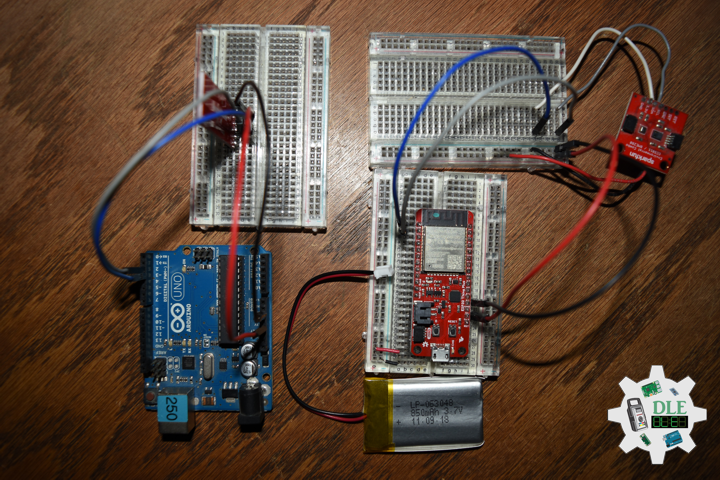
——
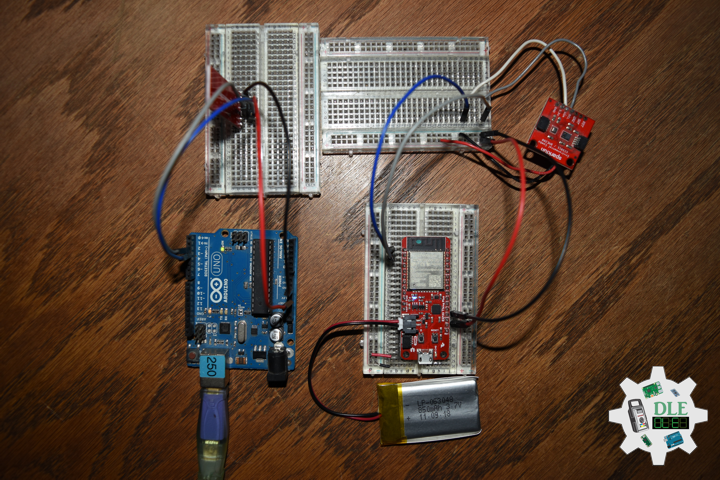
——
SparkFun Air Quality Breakout – CCS811
The CCS811 Air Quality Breakout is a digital gas sensor solution that senses a wide range of Total Volatile Organic Compounds (TVOCs), including equivalent carbon dioxide (eCO2) and metal oxide (MOX) levels. VOCs are often categorized as pollutants and or sensory irritants and can come from a variety of sources like construction materials, machines and even people. This breakout is intended for indoor air quality monitoring in personal devices such as watches and phone.
DL2307Mk03
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Arduino Uno
1 x SparkFun Bluetooth Mate Silver
1 x SparkFun BME280 – Temperature, Humidity, Barometric Pressure, and Altitude
1 x SparkFun Air Quality Breakout – CCS811
1 x Lithium Ion Battery – 850mAh
2 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
LED – LED_BUILTIN
SDA – Digital 23
SCL – Digital 22
RX2 – Bluetooth
TX2 – Bluetooth
VIN – +3.3V
GND – GND
——
DL2307Mk03ps.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - SparkFun CCS811 - Mk22
26-22
DL2307Mk03pr.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x Arduino Uno
1 x SparkFun Bluetooth Mate Silver
1 x SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
1 x SparkFun Air Quality Breakout - CCS811
1 x Lithium Ion Battery - 850mAh
2 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Bluetooth Serial
#include "BluetoothSerial.h"
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to and enable it
#endif
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
#include <SparkFunBME280.h>
// SparkFun CCS811 - eCO2 & tVOC
#include <SparkFunCCS811.h>
// Bluetooth Serial
BluetoothSerial SerialBT;
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
BME280 myBME280;
float BMEtempC = 0;
float BMEhumid = 0;
float BMEpressure = 0;
float BMEaltitudeM = 0;
String FullString = "";
// SparkFun CCS811 - eCO2 & tVOC
// Default I2C Address
#define CCS811_ADDR 0x5B
CCS811 myCCS811(CCS811_ADDR);
float CCS811CO2 = 0;
float CCS811TVOC = 0;
String FullStringA = "";
// Software Version Information
String sver = "26-22";
void loop() {
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
isBME280();
// SparkFun CCS811 - eCO2 & tVOC
isCCS811();
// Delay 1 sec
delay(1000);
}
getBME280.ino
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
// isBME280 - Temperature, Humidity, Barometric Pressure, and Altitude
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// FullString
FullString = "Temperature = " + String(BMEtempC,2) + " Humidity = "
+ String(BMEhumid,2) + " Barometric = " + String(BMEpressure,2)
+ " Altitude Meters = " + String(BMEaltitudeM,2) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
getCCS811.ino
// CCS811 - eCO2 & tVOC
// isCCS811 - eCO2 & tVOC
void isCCS811(){
// This sends the temperature & humidity data to the CCS811
myCCS811.setEnvironmentalData(BMEhumid, BMEtempC);
// Calling this function updates the global tVOC and eCO2 variables
myCCS811.readAlgorithmResults();
// eCO2 Concentration
CCS811CO2 = myCCS811.getCO2();
// tVOC Concentration
CCS811TVOC = myCCS811.getTVOC();
// FullStringA
FullStringA = "TVOCs = " + String(CCS811TVOC,2) + " eCO2 = "
+ String(CCS811CO2,2) + "\r\n";
// FullStringA Bluetooth Serial + Serial
for(int i = 0; i < FullStringA.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullStringA.c_str()[i]);
// Serial
Serial.write(FullStringA.c_str()[i]);
}
}
setup.ino
// Setup
void setup()
{
// Serial Begin
Serial.begin(9600);
Serial.println("Starting BLE work!");
// Bluetooth Serial
SerialBT.begin("Don Luc Electronics");
Serial.println("Bluetooth Started! Ready to pair...");
// Give display time to power on
delay(100);
// Wire - Inialize I2C Hardware
Wire.begin();
// Give display time to power on
delay(100);
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
myBME280.begin();
// CCS811 - eCO2 & tVOC
myCCS811.begin();
// Initialize digital pin LED_BUILTIN as an output
pinMode(LED_BUILTIN, OUTPUT);
// Turn the LED on HIGH
digitalWrite(LED_BUILTIN, HIGH);
}
——
Arduino Uno
RX – Digital 3
TX – Digital 2
VIN – +3.3V
GND – GND
DL2307Mk03pr.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Bluetooth CCS811 - Mk22
26-22
DL2307Mk03pr.ino
1 x Arduino Uno
1 x SparkFun RedBoard Qwiic
1 x SparkFun Bluetooth Mate Silver
1 x SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
1 x SparkFun Air Quality Breakout - CCS811
1 x Lithium Ion Battery - 850mAh
2 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Software Serial
#include <SoftwareSerial.h>
// Software Serial
// TX-O pin of bluetooth mate, Arduino D2
int bluetoothTx = 2;
// RX-I pin of bluetooth mate, Arduino D3
int bluetoothRx = 3;
// Bluetooth
SoftwareSerial bluetooth(bluetoothTx, bluetoothRx);
// BTA
//String BTA = "0006664FDC9E";
// Software Version Information
String sver = "26-22";
void loop() {
// isBluetooth
isBluetooth();
}
getBluetooth.ino
// Bluetooth
// Setup Bluetooth
void isSetupBluetooth(){
// Setup Bluetooth
// Begin the serial monitor at 9600bps
Serial.begin(9600);
// Bluetooth
// The Bluetooth Mate defaults to 115200bps
bluetooth.begin(115200);
// Print three times individually
bluetooth.print("$");
bluetooth.print("$");
bluetooth.print("$");
// Enter command mode
// Short delay, wait for the Mate to send back CMD
delay(100);
// Temporarily Change the baudrate to 9600, no parity
bluetooth.println("U,9600,N");
// 115200 can be too fast at times for NewSoftSerial to relay the data reliably
// Start bluetooth serial at 9600
bluetooth.begin(9600);
}
// isBluetooth
void isBluetooth() {
// If the bluetooth sent any characters
if(bluetooth.available())
{
// Send any characters the bluetooth prints to the serial monitor
Serial.print((char)bluetooth.read());
}
// If stuff was typed in the serial monitor
if(Serial.available())
{
// Send any characters the Serial monitor prints to the bluetooth
bluetooth.print((char)Serial.read());
}
}
setup.ino
// Setup
void setup()
{
// Setup Bluetooth
isSetupBluetooth();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #26 – Radio Frequency – Bluetooth SparkFun BME280 – Mk21
——
#DonLucElectronics #DonLuc #RadioFrequency #Bluetooth #SparkFun #BME280 #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
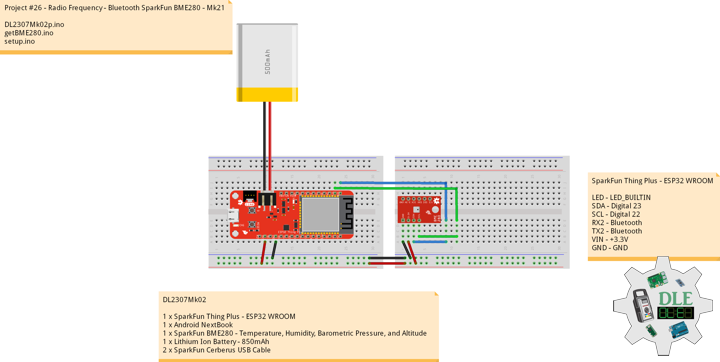
——
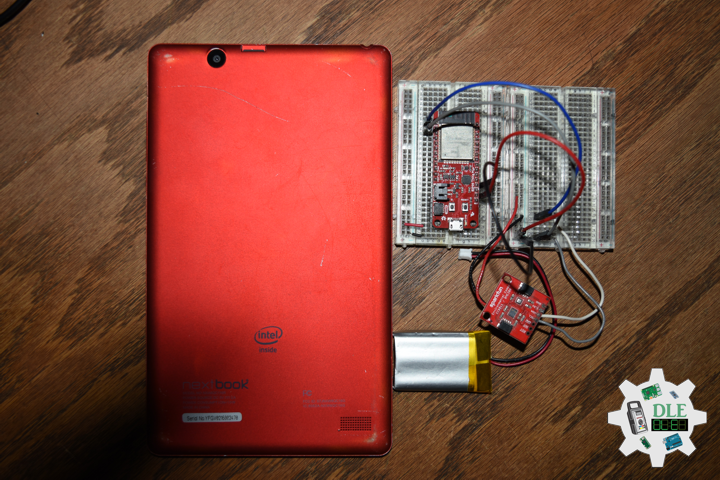
——
——
SparkFun Atmospheric Sensor Breakout – BME280
The SparkFun BME280 Atmospheric Sensor Breakout is the easy way to measure barometric pressure, humidity, and temperature readings all without taking up too much space. Basically, anything you need to know about atmospheric conditions you can find out from this tiny breakout. The BME280 Breakout has been design to be used in indoor/outdoor navigation, weather forecasting, home automation, and even personal health and wellness monitoring.
DL2307Mk02
1 x SparkFun Thing Plus – ESP32 WROOM
1 x Android NextBook
1 x SparkFun BME280 – Temperature, Humidity, Barometric Pressure, and Altitude
1 x Lithium Ion Battery – 850mAh
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
LED – LED_BUILTIN
SDA – Digital 23
SCL – Digital 22
RX2 – Bluetooth
TX2 – Bluetooth
VIN – +3.3V
GND – GND
——
DL2307Mk02p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - SparkFun BME280 - Mk21
26-21
DL2307Mk02pr.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x Android NextBook
1 x SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
1 x Lithium Ion Battery - 850mAh
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Bluetooth Serial
#include "BluetoothSerial.h"
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to and enable it
#endif
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
#include <SparkFunBME280.h>
// Bluetooth Serial
BluetoothSerial SerialBT;
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
BME280 myBME280;
float BMEtempC = 0;
float BMEhumid = 0;
float BMEpressure = 0;
float BMEaltitudeM = 0;
String FullString = "";
// Software Version Information
String sver = "26-21";
void loop() {
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
isBME280();
// Delay 1 sec
delay(1000);
}
getBME280.ino
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
// isBME280 - Temperature, Humidity, Barometric Pressure, and Altitude
void isBME280(){
// Temperature Celsius
BMEtempC = myBME280.readTempC();
// Humidity
BMEhumid = myBME280.readFloatHumidity();
// Barometric Pressure
BMEpressure = myBME280.readFloatPressure();
// Altitude Meters
BMEaltitudeM = (myBME280.readFloatAltitudeMeters(), 2);
// FullString
FullString = "Temperature = " + String(BMEtempC,2) + " Humidity = "
+ String(BMEhumid,2) + " Barometric = " + String(BMEpressure,2)
+ " Altitude Meters = " + String(BMEaltitudeM,2) + "\r\n";
// FullString Bluetooth Serial + Serial
for(int i = 0; i < FullString.length(); i++)
{
// Bluetooth Serial
SerialBT.write(FullString.c_str()[i]);
// Serial
Serial.write(FullString.c_str()[i]);
}
}
setup.ino
// Setup
void setup()
{
// Serial Begin
Serial.begin(115200);
Serial.println("Starting BLE work!");
// Bluetooth Serial
SerialBT.begin("Don Luc Electronics");
Serial.println("Bluetooth Started! Ready to pair...");
// Give display time to power on
delay(100);
// Wire - Inialize I2C Hardware
Wire.begin();
// Give display time to power on
delay(100);
// SparkFun BME280 - Temperature, Humidity, Barometric Pressure, and Altitude
myBME280.begin();
// Initialize digital pin LED_BUILTIN as an output
pinMode(LED_BUILTIN, OUTPUT);
// Turn the LED on HIGH
digitalWrite(LED_BUILTIN, HIGH);
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #26 – Radio Frequency – Bluetooth Moteino – Mk18
——
#DonLucElectronics #DonLuc #RadioFrequency #Bluetooth #Accelerometer #Magnetometer #Gyroscope #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
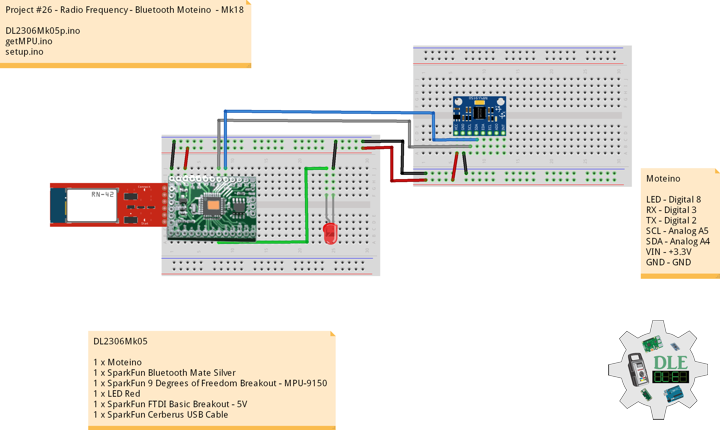
——

——

——
Moteino
Moteino began as a low power wireless Arduino compatible development platform based on the popular ATmega328p chip used in the Arduino UNO. Moteinos are compatible and can communicate with any other Arduino or development platform that uses the popular HopeRF RFM69 or LoRa transceivers, or even the older RFM12B. Moteino also comes with an optional SPI flash memory chip for wireless programming, or data logging. Moteino was designed to be a compact, highly customizable and affordable development platform, suitable for IoT, home automation and long range wireless projects.
Moteino in RFM12B to rebuild suggests doing as new without completely replacing. I decided to stripped down at RFM12B and rebuild in Bluetooth.
DL2306Mk05
1 x Moteino
1 x SparkFun Bluetooth Mate Silver
1 x SparkFun 9 Degrees of Freedom Breakout – MPU-9150
1 x LED Red
1 x SparkFun FTDI Basic Breakout – 5V
1 x SparkFun Cerberus USB Cable
Moteino
LED – Digital 8
RX – Digital 3
TX – Digital 2
SDA – Analog A4
SCL – Analog A5
VIN – +3.3V
GND – GND
——
DL2306Mk05p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - Bluetooth Moteino - Mk18
26-18
DL2306Mk05p.ino
1 x Moteino
1 x SparkFun Bluetooth Mate Silver
1 x SparkFun 9 Degrees of Freedom Breakout - MPU-9150
1 x LED Red
1 x SparkFun FTDI Basic Breakout - 5V
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Software Serial
#include <SoftwareSerial.h>
// Two Wire Interface (TWI/I2C)
#include <Wire.h>
// I2CDev I2C utilities
#include "I2Cdev.h"
// MPU9150Lib 9-axis fusion
#include "MPU9150Lib.h"
// CalLib magnetometer and accelerometer calibration
#include "CalLib.h"
// Motion Driver InvenSense Embedded SDK v5.1
#include <dmpKey.h>
#include <dmpmap.h>
#include <inv_mpu.h>
#include <inv_mpu_dmp_motion_driver.h>
// EEPROM Magnetometer and Accelerometer data is stored
#include <EEPROM.h>
// the MPU object
MPU9150Lib MPU;
// MPU_UPDATE_RATE defines the rate (in Hz)
// at which the MPU updates the sensor data and DMP output
#define MPU_UPDATE_RATE (20)
// MAG_UPDATE_RATE defines the rate (in Hz) at which the
// MPU updates the magnetometer data
// MAG_UPDATE_RATE should be less than or equal to the MPU_UPDATE_RATE
#define MAG_UPDATE_RATE (10)
// MPU_MAG_MIX defines the influence that the magnetometer has on the yaw output.
// The magnetometer itself is quite noisy so some mixing with the gyro yaw can help
// significantly. Some example values are defined below:
// Just use gyro yaw
#define MPU_MAG_MIX_GYRO_ONLY 0
// Just use magnetometer and no gyro yaw
#define MPU_MAG_MIX_MAG_ONLY 1
// A good mix value
#define MPU_MAG_MIX_GYRO_AND_MAG 10
// mainly gyros with a bit of mag correction
#define MPU_MAG_MIX_GYRO_AND_SOME_MAG 50
// MPU_LPF_RATE is the low pas filter rate and can be between 5 and 188Hz
#define MPU_LPF_RATE 5
// This is our earth frame gravity vector - quaternions and vectors
MPUQuaternion gravity;
// Quaternion Result
float Quaternion_X = 0.0;
float Quaternion_Y = 0.0;
float Quaternion_Z = 0.0;
// SERIAL_PORT_SPEED defines the speed to use for the debug serial port
#define SERIAL_PORT_SPEED 115200
// Software Serial
// TX-O pin of bluetooth mate, Arduino D2
int bluetoothTx = 2;
// RX-I pin of bluetooth mate, Arduino D3
int bluetoothRx = 3;
// Bluetooth
SoftwareSerial bluetooth(bluetoothTx, bluetoothRx);
// BTA
String BTA = "0006664FAE18";
// LED Red
int iLedRed = 8;
// Variable to calculate frequency
unsigned long curr = 0;
unsigned long last = 0;
unsigned long freq;
// Software Version Information
String sver = "26-18";
void loop() {
// MPU
isMPU();
}
getMPU.ino
// MPU
// Setup MPU
void isSetupMPU() {
// MPU
MPU.init(MPU_UPDATE_RATE, MPU_MAG_MIX_GYRO_AND_MAG, MAG_UPDATE_RATE, MPU_LPF_RATE); // start the MPU
// Set up the initial gravity vector for quaternion rotation
// Max value down the z axis
gravity[QUAT_W] = 0;
gravity[QUAT_X] = 0;
gravity[QUAT_Y] = 0;
gravity[QUAT_Z] = SENSOR_RANGE;
}
// MPU
void isMPU() {
// Quaternion
// This is our body frame gravity vector
MPUQuaternion rotatedGravity;
// This is the conjugate of the fused quaternion
MPUQuaternion fusedConjugate;
// Used in the rotation
MPUQuaternion qTemp;
// The accelerations
MPUVector3 result;
// Get the latest data
if (MPU.read()) {
// Need this for the rotation
MPUQuaternionConjugate(MPU.m_fusedQuaternion, fusedConjugate);
// Rotate the gravity vector into the body frame
MPUQuaternionMultiply(gravity, MPU.m_fusedQuaternion, qTemp);
MPUQuaternionMultiply(fusedConjugate, qTemp, rotatedGravity);
// Now subtract rotated gravity from the body accels to get real accelerations.
// Note that signs are reversed to get +ve acceleration results
// in the conventional axes.
// Quaternion Result
Quaternion_X = -(MPU.m_calAccel[VEC3_X] - rotatedGravity[QUAT_X]);
Quaternion_Y = -(MPU.m_calAccel[VEC3_Y] - rotatedGravity[QUAT_Y]);
Quaternion_Z = -(MPU.m_calAccel[VEC3_Z] - rotatedGravity[QUAT_Z]);
// Variable to calculate frequency
curr = micros();
freq = curr - last;
last = curr;
// Bluetooth
Serial.print( "Blue|" + BTA + "|" );
Serial.print( Quaternion_X );
Serial.print( "|" );
Serial.print( Quaternion_Y );
Serial.print( "|" );
Serial.print( Quaternion_Z );
Serial.print( "|" );
Serial.print( freq );
Serial.println( "|*" );
// Send any characters the Serial monitor prints to the bluetooth
bluetooth.print((char)Serial.read());
}
}
setup.ino
// Setup
void setup()
{
// Serial
Serial.begin(SERIAL_PORT_SPEED);
// Bluetooth
// The Bluetooth Mate defaults to 115200bps
bluetooth.begin(115200);
// LED Red
pinMode(iLedRed, OUTPUT);
digitalWrite(iLedRed, HIGH);
// Give display time to power on
delay(100);
// Wire communicate with I2C / TWI devices
Wire.begin();
// Pause
delay(50);
// Setup MPU
isSetupMPU();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #26 – Radio Frequency – 4×4 Offroad Race – Mk15
——
#DonLucElectronics #DonLuc #RadioFrequency #Bluetooth #Games #Gamepad #ESP32 #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
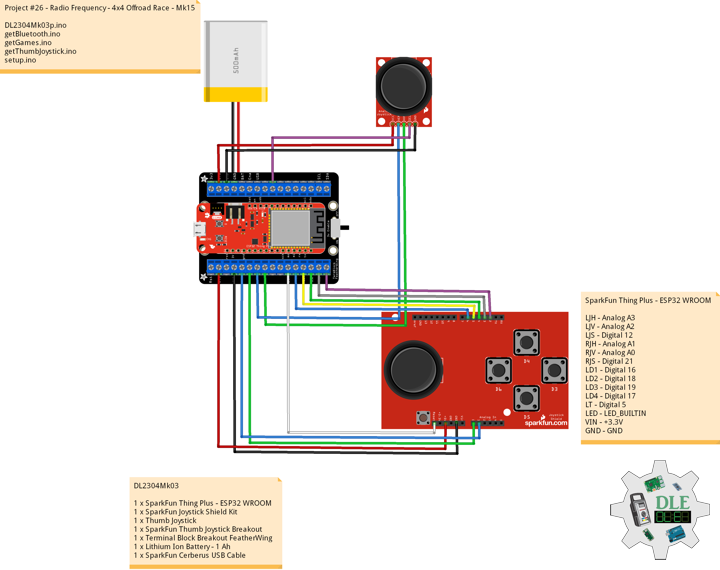
——
——
——
4×4 Offroad Race
3D off-road racing game. Powerful off-road vehicles, trails and routes running on dirt roads, extreme weather conditions and violent opponents, all that we call 4×4 Offroad Race. You will be able to experience the most powerful four-wheel drive vehicles. You have to overcome terrible roads, do jumps over bumps and potholes and knock opponents off the track to win all the races.
DL2304Mk03
1 x SparkFun Thing Plus – ESP32 WROOM
1 x SparkFun Joystick Shield Kit
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery – 1 Ah
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
LJH – Analog A3
LJV – Analog A2
LJS – Digital 12
RJH – Analog A1
RJV – Analog A0
RJS – Digital 21
LD1 – Digital 16
LD2 – Digital 18
LD3 – Digital 19
LD4 – Digital 17
LT – Digital 5
LED – LED_BUILTIN
VIN – +3.3V
GND – GND
——
DL2304Mk03p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - 4x4 Offroad Race - Mk15
26-15
DL2304Mk03p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x SparkFun Joystick Shield Kit
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery - 1 Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Arduino
#include <Arduino.h>
// ESP32 BLE Gamepad
#include <BleGamepad.h>
// ESP32 BLE Gamepad
BleGamepad bleGamepad;
// Left Joystick
#define LJH A3
#define LJV A2
#define LJS 12
// Right Joystick
#define RJH A0
#define RJV A1
#define RJS 21
// D-pad
#define LD1 19
#define LD2 17
#define LD3 18
#define LD4 16
// LT
#define LT 5
// Previous Button State
int previousButton1State = HIGH;
int previousButton2State = HIGH;
int previousButton3State = HIGH;
int previousButton4State = HIGH;
int previousButton5State = HIGH;
int previousButton6State = HIGH;
int previousButton7State = HIGH;
// Number of pot samples to take (to smooth the values)
const int numberOfPotSamples = 5;
// Delay in milliseconds between pot samples
const int delayBetweenSamples = 2;
// Additional delay in milliseconds between HID reports
const int delayBetweenHIDReports = 5;
// Delay in milliseconds between button press
const int debounceDelay = 10;
// Software Version Information
String sver = "26-15";
void loop() {
// Bluetooth Serial (ESP32SPP)
isBluetooth();
}
getBluetooth.ino
// Bluetooth
// isBluetooth
void isBluetooth() {
// ESP32 BLE Gamepad
if(bleGamepad.isConnected())
{
// Button
isButton();
// Joystick
isThumbJoystick();
}
}
getGames.ino
// Games
// Set Inputs
void setInputs() {
// Make the button line an input
pinMode(LJS, INPUT_PULLUP);
pinMode(RJS, INPUT_PULLUP);
pinMode(LD1, INPUT_PULLUP);
pinMode(LD2, INPUT_PULLUP);
pinMode(LD3, INPUT_PULLUP);
pinMode(LD4, INPUT_PULLUP);
pinMode(LT, INPUT_PULLUP);
// Initialize digital pin LED_BUILTIN as an output.
pinMode(LED_BUILTIN, OUTPUT);
// Turn the LED on HIGH
digitalWrite(LED_BUILTIN, HIGH);
}
// Button
void isButton(){
// Button1 State LD1
int currentButton1State = digitalRead(LD1);
if (currentButton1State != previousButton1State)
{
if (currentButton1State == LOW)
{
bleGamepad.press(BUTTON_1);
}
else
{
bleGamepad.release(BUTTON_1);
}
}
previousButton1State = currentButton1State;
// Button2 State LD2
int currentButton2State = digitalRead(LD2);
if (currentButton2State != previousButton2State)
{
if (currentButton2State == LOW)
{
bleGamepad.press(BUTTON_2);
}
else
{
bleGamepad.release(BUTTON_2);
}
}
previousButton2State = currentButton2State;
// Button3 State LD3
int currentButton3State = digitalRead(LD3);
if (currentButton3State != previousButton3State)
{
if (currentButton3State == LOW)
{
bleGamepad.press(BUTTON_3);
}
else
{
bleGamepad.release(BUTTON_3);
}
}
previousButton3State = currentButton3State;
// Button4 State LD4
int currentButton4State = digitalRead(LD4);
if (currentButton4State != previousButton4State)
{
if (currentButton4State == LOW)
{
bleGamepad.press(BUTTON_4);
}
else
{
bleGamepad.release(BUTTON_4);
}
}
previousButton4State = currentButton4State;
// Button5 State LJS
int currentButton5State = digitalRead(LJS);
if (currentButton5State != previousButton5State)
{
if (currentButton5State == LOW)
{
bleGamepad.press(BUTTON_5);
}
else
{
bleGamepad.release(BUTTON_5);
}
}
previousButton5State = currentButton5State;
// Button6 State RJS
int currentButton6State = digitalRead(RJS);
if (currentButton6State != previousButton6State)
{
if (currentButton6State == LOW)
{
bleGamepad.press(BUTTON_6);
}
else
{
bleGamepad.release(BUTTON_6);
}
}
previousButton6State = currentButton6State;
// Button7 State LT
int currentButton7State = digitalRead(LT);
if (currentButton7State != previousButton7State)
{
if (currentButton7State == LOW)
{
bleGamepad.press(BUTTON_7);
}
else
{
bleGamepad.release(BUTTON_7);
}
}
previousButton7State = currentButton7State;
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Joystick LJH
// Joystick Pot Values LJH
int potValues[numberOfPotSamples];
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValues[i] = analogRead(LJH);
delay(delayBetweenSamples);
}
int potValue = 0;
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValue += potValues[i];
}
// Value / Pot Samples
potValue = potValue / numberOfPotSamples;
// Adjusted Value
int adjustedValue = map(potValue, 0, 4095, 32737, 0);
// Joystick LJV
// Joystick Pot Values LJV
int potValues2[numberOfPotSamples];
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValues2[i] = analogRead(LJV);
delay(delayBetweenSamples);
}
int potValue2 = 0;
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValue2 += potValues2[i];
}
// Value2 / Pot Samples
potValue2 = potValue2 / numberOfPotSamples;
// Adjusted Value2
int adjustedValue2 = map(potValue2, 0, 4095, 32737, 0);
// Joystick RJH
// Joystick Pot Values RJH
int potValues3[numberOfPotSamples];
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValues3[i] = analogRead(RJH);
delay(delayBetweenSamples);
}
int potValue3 = 0;
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValue3 += potValues3[i];
}
// Value3 / Pot Samples
potValue3 = potValue3 / numberOfPotSamples;
// Adjusted Value3
int adjustedValue3 = map(potValue3, 0, 4095, 32737, 0);
// Joystick RJV
// Joystick Pot Values RJV
int potValues4[numberOfPotSamples];
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValues4[i] = analogRead(RJV);
delay(delayBetweenSamples);
}
int potValue4 = 0;
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValue4 += potValues4[i];
}
// Value4 / Pot Samples
potValue4 = potValue4 / numberOfPotSamples;
// Adjusted Value4
int adjustedValue4 = map(potValue4, 0, 4095, 0, 32737);
//bleGamepad.setAxes(adjustedValue, adjustedValue2, 0, 0, adjustedValue3, adjustedValue4, DPAD_CENTERED);
bleGamepad.setAxes(adjustedValue, adjustedValue2, adjustedValue4, 0, adjustedValue3, 0, DPAD_CENTERED);
delay(delayBetweenHIDReports);
// D-pad
// LD1
if (digitalRead(LD1) == LOW){
bleGamepad.setAxes(adjustedValue, adjustedValue2, adjustedValue4, 0, adjustedValue3, 0, DPAD_UP);
}
// LD2
if (digitalRead(LD2) == LOW){
bleGamepad.setAxes(adjustedValue, adjustedValue2, adjustedValue4, 0, adjustedValue3, 0, DPAD_LEFT);
}
// LD3
if (digitalRead(LD3) == LOW){
bleGamepad.setAxes(adjustedValue, adjustedValue2, adjustedValue4, 0, adjustedValue3, 0, DPAD_DOWN);
}
// LD4
if (digitalRead(LD4) == LOW){
bleGamepad.setAxes(adjustedValue, adjustedValue2, adjustedValue4, 0, adjustedValue3, 0, DPAD_RIGHT);
}
}
setup.ino
// Setup
void setup()
{
// Set Inputs
setInputs();
// ESP32 BLE Gamepad
bleGamepad.begin();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc
Project #26 – Radio Frequency – Gamepad Tester – Mk14
——
#DonLucElectronics #DonLuc #RadioFrequency #Bluetooth #JoystickTest #Gamepad #ESP32 #Arduino #Project #Fritzing #Programming #Electronics #Microcontrollers #Consultant
——
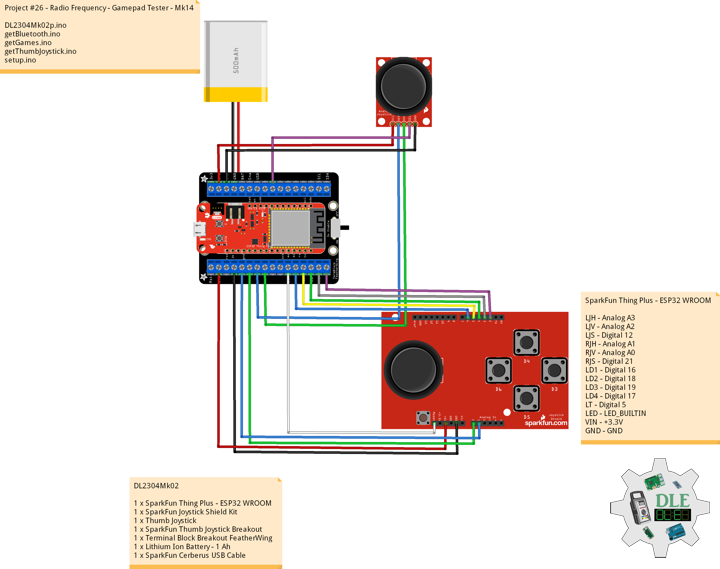
——
——
——
Controller & Gamepad Tester
You can begin testing your controller or gamepad by pressing a button or moving one of the analog sticks on your gamepad. When you press a button or move an analog stick, the illustration above should light up or display the movement of your analog stick. When we detect movement or button presses, the “Controller Detected” message will show up with your controller’s name in it. If you have multiple controllers or gamepads connected, then please try them one by one. Even though the illustration represents an Xbox controller, the test also works with other similar controllers.
DL2304Mk02
1 x SparkFun Thing Plus – ESP32 WROOM
1 x SparkFun Joystick Shield Kit
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery – 1 Ah
1 x SparkFun Cerberus USB Cable
SparkFun Thing Plus – ESP32 WROOM
LJH – Analog A3
LJV – Analog A2
LJS – Digital 12
RJH – Analog A1
RJV – Analog A0
RJS – Digital 21
LD1 – Digital 16
LD2 – Digital 18
LD3 – Digital 19
LD4 – Digital 17
LT – Digital 5
LED – LED_BUILTIN
VIN – +3.3V
GND – GND
——
DL2304Mk02p.ino
/* ***** Don Luc Electronics © *****
Software Version Information
Project #26 - Radio Frequency - - Mk14
26-14
DL2304Mk02p.ino
1 x SparkFun Thing Plus - ESP32 WROOM
1 x SparkFun Joystick Shield Kit
1 x Thumb Joystick
1 x SparkFun Thumb Joystick Breakout
1 x Terminal Block Breakout FeatherWing
1 x Lithium Ion Battery - 1 Ah
1 x SparkFun Cerberus USB Cable
*/
// Include the Library Code
// Arduino
#include <Arduino.h>
// ESP32 BLE Gamepad
#include <BleGamepad.h>
// ESP32 BLE Gamepad
BleGamepad bleGamepad;
// Left Joystick
#define LJH A3
#define LJV A2
#define LJS 12
// Right Joystick
#define RJH A0
#define RJV A1
#define RJS 21
// D-pad
#define LD1 19
#define LD2 17
#define LD3 18
#define LD4 16
// LT
#define LT 5
// Previous Button State
int previousButton1State = HIGH;
int previousButton2State = HIGH;
int previousButton3State = HIGH;
int previousButton4State = HIGH;
int previousButton5State = HIGH;
int previousButton6State = HIGH;
int previousButton7State = HIGH;
// Number of pot samples to take (to smooth the values)
const int numberOfPotSamples = 5;
// Delay in milliseconds between pot samples
const int delayBetweenSamples = 2;
// Additional delay in milliseconds between HID reports
const int delayBetweenHIDReports = 5;
// Delay in milliseconds between button press
const int debounceDelay = 10;
// Software Version Information
String sver = "26-14";
void loop() {
// Bluetooth Serial (ESP32SPP)
isBluetooth();
}
getBluetooth.ino
// Bluetooth
// isBluetooth
void isBluetooth() {
// ESP32 BLE Gamepad
if(bleGamepad.isConnected())
{
// Button
isButton();
// Joystick
isThumbJoystick();
}
}
getGames.ino
// Games
// Set Inputs
void setInputs() {
// Make the button line an input
pinMode(LJS, INPUT_PULLUP);
pinMode(RJS, INPUT_PULLUP);
pinMode(LD1, INPUT_PULLUP);
pinMode(LD2, INPUT_PULLUP);
pinMode(LD3, INPUT_PULLUP);
pinMode(LD4, INPUT_PULLUP);
pinMode(LT, INPUT_PULLUP);
// Initialize digital pin LED_BUILTIN as an output.
pinMode(LED_BUILTIN, OUTPUT);
// Turn the LED on HIGH
digitalWrite(LED_BUILTIN, HIGH);
}
// Button
void isButton(){
// Button1 State LD1
int currentButton1State = digitalRead(LD1);
if (currentButton1State != previousButton1State)
{
if (currentButton1State == LOW)
{
bleGamepad.press(BUTTON_1);
}
else
{
bleGamepad.release(BUTTON_1);
}
}
previousButton1State = currentButton1State;
// Button2 State LD2
int currentButton2State = digitalRead(LD2);
if (currentButton2State != previousButton2State)
{
if (currentButton2State == LOW)
{
bleGamepad.press(BUTTON_2);
}
else
{
bleGamepad.release(BUTTON_2);
}
}
previousButton2State = currentButton2State;
// Button3 State LD3
int currentButton3State = digitalRead(LD3);
if (currentButton3State != previousButton3State)
{
if (currentButton3State == LOW)
{
bleGamepad.press(BUTTON_3);
}
else
{
bleGamepad.release(BUTTON_3);
}
}
previousButton3State = currentButton3State;
// Button4 State LD4
int currentButton4State = digitalRead(LD4);
if (currentButton4State != previousButton4State)
{
if (currentButton4State == LOW)
{
bleGamepad.press(BUTTON_4);
}
else
{
bleGamepad.release(BUTTON_4);
}
}
previousButton4State = currentButton4State;
// Button5 State LJS
int currentButton5State = digitalRead(LJS);
if (currentButton5State != previousButton5State)
{
if (currentButton5State == LOW)
{
bleGamepad.press(BUTTON_5);
}
else
{
bleGamepad.release(BUTTON_5);
}
}
previousButton5State = currentButton5State;
// Button6 State RJS
int currentButton6State = digitalRead(RJS);
if (currentButton6State != previousButton6State)
{
if (currentButton6State == LOW)
{
bleGamepad.press(BUTTON_6);
}
else
{
bleGamepad.release(BUTTON_6);
}
}
previousButton6State = currentButton6State;
// Button7 State LT
int currentButton7State = digitalRead(LT);
if (currentButton7State != previousButton7State)
{
if (currentButton7State == LOW)
{
bleGamepad.press(BUTTON_7);
}
else
{
bleGamepad.release(BUTTON_7);
}
}
previousButton7State = currentButton7State;
}
getThumbJoystick.ino
// Thumb Joystick
void isThumbJoystick() {
// Joystick LJH
// Joystick Pot Values LJH
int potValues[numberOfPotSamples];
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValues[i] = analogRead(LJH);
delay(delayBetweenSamples);
}
int potValue = 0;
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValue += potValues[i];
}
// Value / Pot Samples
potValue = potValue / numberOfPotSamples;
// Adjusted Value
int adjustedValue = map(potValue, 0, 4095, 32737, 0);
// Joystick LJV
// Joystick Pot Values LJV
int potValues2[numberOfPotSamples];
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValues2[i] = analogRead(LJV);
delay(delayBetweenSamples);
}
int potValue2 = 0;
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValue2 += potValues2[i];
}
// Value2 / Pot Samples
potValue2 = potValue2 / numberOfPotSamples;
// Adjusted Value2
int adjustedValue2 = map(potValue2, 0, 4095, 32737, 0);
// Joystick RJH
// Joystick Pot Values RJH
int potValues3[numberOfPotSamples];
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValues3[i] = analogRead(RJH);
delay(delayBetweenSamples);
}
int potValue3 = 0;
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValue3 += potValues3[i];
}
// Value3 / Pot Samples
potValue3 = potValue3 / numberOfPotSamples;
// Adjusted Value3
int adjustedValue3 = map(potValue3, 0, 4095, 32737, 0);
Serial.print(" RJH: ");
Serial.println(potValue3);
// Joystick RJV
// Joystick Pot Values RJV
int potValues4[numberOfPotSamples];
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValues4[i] = analogRead(RJV);
delay(delayBetweenSamples);
}
int potValue4 = 0;
for (int i = 0 ; i < numberOfPotSamples ; i++) {
potValue4 += potValues4[i];
}
// Value4 / Pot Samples
potValue4 = potValue4 / numberOfPotSamples;
// Adjusted Value4
int adjustedValue4 = map(potValue4, 0, 4095, 0, 32737);
Serial.print(" RJV: ");
Serial.println(potValue4);
//bleGamepad.setAxes(adjustedValue, adjustedValue2, 0, 0, adjustedValue3, adjustedValue4, DPAD_CENTERED);
bleGamepad.setAxes(adjustedValue, adjustedValue2, adjustedValue4, 0, adjustedValue3, 0, DPAD_CENTERED);
delay(delayBetweenHIDReports);
// D-pad
// LD1
if (digitalRead(LD1) == LOW){
bleGamepad.setAxes(adjustedValue, adjustedValue2, adjustedValue4, 0, adjustedValue3, 0, DPAD_UP);
}
// LD2
if (digitalRead(LD2) == LOW){
bleGamepad.setAxes(adjustedValue, adjustedValue2, adjustedValue4, 0, adjustedValue3, 0, DPAD_LEFT);
}
// LD3
if (digitalRead(LD3) == LOW){
bleGamepad.setAxes(adjustedValue, adjustedValue2, adjustedValue4, 0, adjustedValue3, 0, DPAD_DOWN);
}
// LD4
if (digitalRead(LD4) == LOW){
bleGamepad.setAxes(adjustedValue, adjustedValue2, adjustedValue4, 0, adjustedValue3, 0, DPAD_RIGHT);
}
}
setup.ino
// Setup
void setup()
{
// Serial
Serial.begin(115200);
// Set Inputs
setInputs();
// ESP32 BLE Gamepad
bleGamepad.begin();
}
——
People can contact us: https://www.donluc.com/?page_id=1927
Technology Experience
- Programming Language
- Single-Board Microcontrollers (PIC, Arduino, Raspberry Pi,Espressif, etc…)
- IoT
- Wireless (Radio Frequency, Bluetooth, WiFi, Etc…)
- Robotics
- Camera and Video Capture Receiver Stationary, Wheel/Tank and Underwater Vehicle
- Unmanned Vehicles Terrestrial and Marine
- Machine Learning
- RTOS
- Research & Development (R & D)
Instructor, E-Mentor, STEAM, and Arts-Based Training
- Programming Language
- IoT
- PIC Microcontrollers
- Arduino
- Raspberry Pi
- Espressif
- Robotics
Follow Us
Luc Paquin – Curriculum Vitae – 2023
https://www.donluc.com/luc/
Web: https://www.donluc.com/
Facebook: https://www.facebook.com/neosteam.labs.9/
YouTube: https://www.youtube.com/@thesass2063
Twitter: https://twitter.com/labs_steam
Pinterest: https://www.pinterest.com/NeoSteamLabs/
Instagram: https://www.instagram.com/neosteamlabs/
Don Luc